opencv实践-ROS+opencv打开USB相机做边缘检测
Posted 殇堼
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了opencv实践-ROS+opencv打开USB相机做边缘检测相关的知识,希望对你有一定的参考价值。
功能包资源下载:http://www.hzcourse.com/oep/image/ueditor/jsp/upload/file/20190812/62199-精通ROS机器人编程(原书第2版)_配书资源.rar
一、导入和编译功能包
方法1:
cd ~/catkin_ws/src
git clone https://github.com/bosch-ros-pkg/usb_cam.git
cd ~/catkin_ws
catkin_make
echo "source /home/zjc/catkin_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
方法2:
1.创建一个名为cv_bridge_tutorial_pkg的工作空间
catkin_create_pkg cv_bridge_tutorial_pkg sensor_msgs cv_bridge roscpp std_msgs image_transport
2.编译
catkin_make
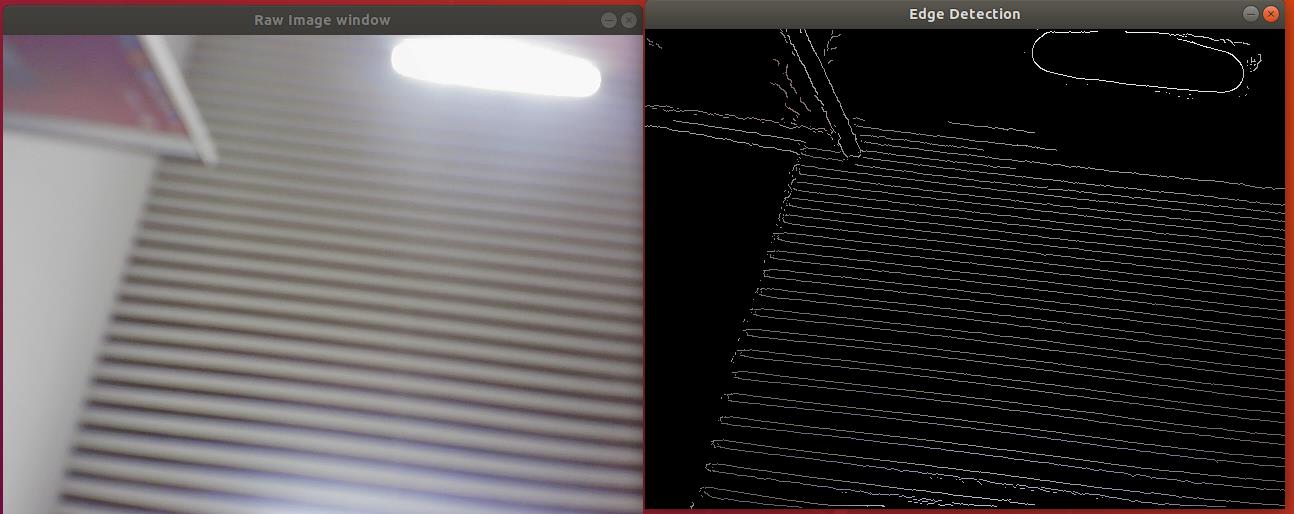
二、启动相机进行边缘检测
终端1:
roslaunch usb_cam usb_cam-test.launch
终端2:
rosrun cv_bridge_tutorial_pkg sample_cv_bridge_node
三、修改代码
源代码解读:
#include <ros/ros.h>
#include <image_transport/image_transport.h>
#include <cv_bridge/cv_bridge.h>
#include <sensor_msgs/image_encodings.h>
#include <opencv2/imgproc/imgproc.hpp>
#include <opencv2/highgui/highgui.hpp>
class Edge_Detector
{
ros::NodeHandle nh_;
image_transport::ImageTransport it_;
image_transport::Subscriber image_sub_;
image_transport::Publisher image_pub_;
public:
Edge_Detector()
: it_(nh_)
{
image_sub_ = it_.subscribe("/usb_cam/image_raw", 1,
&Edge_Detector::imageCb, this);//订阅输入视频
image_pub_ = it_.advertise("/edge_detector/raw_image", 1); //发布输出视频
}
if (cv_ptr->image.rows > 400 && cv_ptr->image.cols > 600)//检测输入图像的是否满足尺寸要求,满足将会执行边缘检测的函数
{
detect_edges(cv_ptr->image);
image_pub_.publish(cv_ptr->toImageMsg());//opencv图像转化为ROS图像,并进行发布。
}
}
//使用cv_bridge将opencv转化为ROS图像
void imageCb(const sensor_msgs::ImageConstPtr& msg)//图像的回调函数
{
cv_bridge::CvImagePtr cv_ptr;
namespace enc = sensor_msgs::image_encodings;
try
{
cv_ptr = cv_bridge::toCvCopy(msg, sensor_msgs::image_encodings::BGR8);
}
catch (cv_bridge::Exception& e)
{
ROS_ERROR("cv_bridge exception: %s", e.what());
return;
}
void detect_edges(cv::Mat img)
{
cv::Mat src, src_gray;
cv::Mat dst, detected_edges;
int edgeThresh = 1;
int lowThreshold = 200;
int highThreshold =300;
int kernel_size = 5;
img.copyTo(src);
cv::cvtColor( img, src_gray, CV_BGR2GRAY );
cv::blur( src_gray, detected_edges, cv::Size(5,5) );
cv::Canny( detected_edges, detected_edges, lowThreshold, highThreshold, kernel_size );
dst = cv::Scalar::all(0);
img.copyTo( dst, detected_edges);
dst.copyTo(img);
cv::imshow("Edge Detection", dst);
cv::waitKey(3);
}
};
int main(int argc, char** argv)
{
ros::init(argc, argv, "Edge_Detector");
Edge_Detector ic;
ros::spin();
return 0;
}
在修改sample_cv_bridge_node.cpp中的代码后需要进行一次编译,以更新sample_cv_bridge_node文件,且该节点文件存放在/home/zjc/catkin_make/devel/lib/cv_bridge_tutorial_pkg目录下
以上是关于opencv实践-ROS+opencv打开USB相机做边缘检测的主要内容,如果未能解决你的问题,请参考以下文章