故障诊断基于PSO_VMD_MCKD方法的风机轴承微弱故障诊断
Posted Zhi Zhao
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了故障诊断基于PSO_VMD_MCKD方法的风机轴承微弱故障诊断相关的知识,希望对你有一定的参考价值。
一、基本理论
1. PSO算法
有关PSO的介绍请阅读博文:PSO-LSSVM算法及其MATLAB代码
2. VMD算法
有关VMD的介绍请阅读博文:VMD算法
3. MCKD算法
3.1 算法简介
最大相关峭度解卷积(Maximum Correlated Kurtosis Deconvolution,简称MCKD)通过解卷积运算突出被噪声淹没的连续脉冲,提高原始信号的相关峭度值,适用于提取微弱故障信号的连续瞬态冲击。
3.2 算法原理
MCKD算法的实质是寻找一个FIR滤波器来恢复被噪声淹没的连续冲击信号,而为了验证该滤波器恢复出的信号是否满足周期性冲击特性,需要利用相关峭度指标来衡量。相关峭度定义为:
C
K
M
(
T
)
=
∑
n
=
1
N
(
∏
m
=
0
M
y
n
−
m
T
)
2
(
∑
i
=
1
N
y
n
2
)
M
+
1
CK _{M}(T)= \\frac{ \\sum_{n=1}^{N} ( \\prod ^M_{m=0} y_{n}-mT)^2 } { (\\sum_{i=1}^{N} y_{n}^{2} )^{M+1} }
CKM(T)=(∑i=1Nyn2)M+1∑n=1N(∏m=0Myn−mT)2
其中,
T
T
T为冲击信号周期;
M
M
M为移位数;
m
∈
[
0
,
M
]
m∈[0,M]
m∈[0,M];
L
为
滤
波
器
的
长
度
L为滤波器的长度
L为滤波器的长度;
y
n
y_{n}
yn为冲击信号。
对信号进行滤波,当相关峭度
C
K
M
(
T
)
CK_{M}(T)
CKM(T)最大时,求解出来的滤波器就是满足要求的。假设输入信号为
x
x
x,输出信号为
y
y
y,FIR滤波器对信号进行滤波的原理如下:
y
=
f
∗
x
y = f * x
y=f∗x
求解上式中的滤波器系数
f
f
f ,就是解卷积运算的过程。
二、PSO_VMD_MCKD
为实现 VMD 和 MCKD 的参数自适应选择,采用粒子群优化算法对两种算法中的参数进行优化,确定适应度函数为包络谱峰值因子。
方法流程:
1)设定VMD的模态数 K 和惩罚因子 alpha 的寻优范围,利用PSO对VMD算法进行参数寻优;
2)得到VMD的最优模态数 Best_K 和最优惩罚因子 Best_alpha ,再利用VMD对原始信号进行分解,计算各分量的包络谱峰值因子 Ec,选择 Ec 指标最大的分量为最优分量;
3)设定MCKD的滤波器长度参数 L 和 解卷积周期T的寻优范围,利用PSO对VMD算法进行参数寻优;
4)得到MCKD的最优滤波器长度参数 Best_L 和 最优解卷积周期Best_T,再对最优分量进行MCKD分析,最后对解卷积后的信号进行包络解调。
三、MATLAB代码
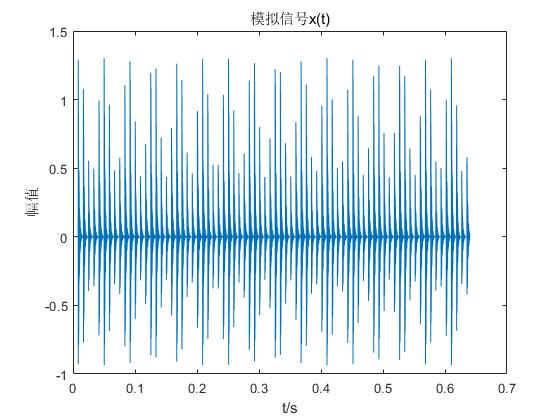
Simulating_faultSignal.m:产生仿真信号
clc;
clear;
close all;
%% 仿真信号
A0 = 0.5; % 位移常数
fr = 25; % 转频
C = 800; % 衰减系数
fn = 4e3; % 共振频率
T = 1/120; % 重复周期
fs = 12800; % 采样频率
N = 8192; % 采样点数
SNR = -16; % 信噪比
NT = round(fs*T); % 单周期采样点数
t0 = (0:NT-1)/fs; % 单周期采样时间
t = (0:N-1)/fs; % 采样时间
k = ceil(N/NT)-1; % 重复次数
x = [];
% 产生k个相同波形
for i = 1:k
t1 = ((i-1)*NT)/fs:1/fs:(i*NT-1)/fs; % k个周期
Ak = A0*sin(2*pi*fr*t1)+1;
h = exp(-C*t0).*sin(2*pi*fn*t0);
x = [x,Ak .* h];
end
tt0 = 0:1/fs:((N/NT-k)*NT)/fs; % k个周期后剩下的采样时刻
tt1 = k*NT/fs:1/fs:(N-1)/fs;
x = [x,((A0*sin(2*pi*fr*tt1)+1).*exp(-C*tt0).*sin(2*pi*fn*tt0))];
x(1:NT) = 0; % 第一个单周期内的信号幅值为0
nt = wgn(1,N,-16); % 高斯白噪声
y = x + nt;
PSO_VMD.m:PSO优化VMD(非完整代码)
%% PSO优化VMD
load y; % y为含噪声信号
P_number = 30; % 粒子群个数
C1 = 2; % 初始化学习因子
C2 = 2;
W_max = 0.90; % 初始权重
W_min = 0.4; % 终止权重
iter = 20; % 迭代次数
% 定义优化参数的取值范围:K取[3,10],Alpha取[100,2000]
Kmax = 10; % 定义优化参数的取值范围
Kmin = 3;
Alphamax = 2000;
Alphamin = 100;
% 定义适应度函数
function f = Adaptness1(K,alpha,y)
K=round(K);
alpha=round(alpha);
% VMD分解
% x:为待分解的时域信号
% u:分解模式的集合
% u_hat:模式的频谱
% omega:估计模式中心频率
% K:分解的模态数
% alpha:惩罚因子,也称平衡参数
tau = 0; % 噪声容忍度
DC = 0; % 无直流分量
init = 1; % 初始化中心频率为均匀分布
tol = 1e-7; % 收敛准则容忍度
[u, ~, omega] = VMD(y, alpha, tau, K, DC, init, tol);
Best_VMD.m(非完整代码):利用VMD对含噪声信号进行分解,得到最优分量
%% 利用PSO优化VMD得到的最优参数,再进行VMD分解
load y; % y为含噪声信号
load bestK;
load bestAlpha;
% VMD分解
% x:为待分解的时域信号
% u:分解模式的集合
% u_hat:模式的频谱
% omega:估计模式中心频率
% K:分解的模态数
% alpha:惩罚因子,也称平衡参数
tau = 0; % 噪声容忍度
DC = 0; % 无直流分量
init = 1; % 初始化中心频率为均匀分布
tol = 1e-7; % 收敛准则容忍度
[u, ~, omega] = VMD(y, bestAlpha, tau, bestK, DC, init, tol);
PSO_MCKD.m:PSO优化MCKD(非完整代码)
%% PSO优化MCKD
load X1; % 读取最优分量
y = X1;
P_number = 30; % 粒子群个数
C1 = 2; % 初始化学习因子
C2 = 2;
W_max = 0.90; % 初始权重
W_min = 0.4; % 终止权重
iter = 20; % 迭代次数
% 定义优化参数的取值范围:L取[100,1000],T取[90,150]
Lmax = 1000; % 定义优化参数的取值范围
Lmin = 100;
Tmax = 142;
Tmin = 85;
% 定义适应度函数
function Ad = Adaptness2(filterSize,T,y)
filterSize = round(filterSize);
T = round(T);
termIter = 30;
M = 3;
plotMode = 0;
[y_final, ~, ~] = MCKD(y,filterSize,termIter,T,M,plotMode);
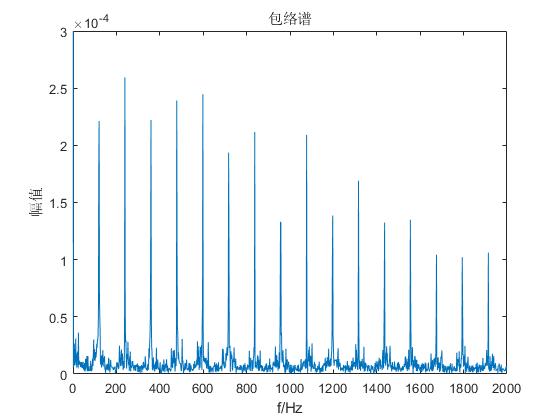
Best_MKCD.m(非完整代码):利用MCKD对最优分量进行解卷积得到最终的信号 y_final
%% 利用PSO优化MCKD得到的最优参数,再进行MCKD分析
load X1; % 读取最优分量
load bestL;
load bestT;
% MCKD:最大相关峭度解卷积
termIter = 30;
M = 3;
plotMode = 0;
[y_final, f_final, ckIter] = MCKD(X1,bestL,termIter,bestT,M,plotMode);
求信号的频谱和包络谱的函数
% 求信号的频谱
[f1,A] = PinPu(y,fs);
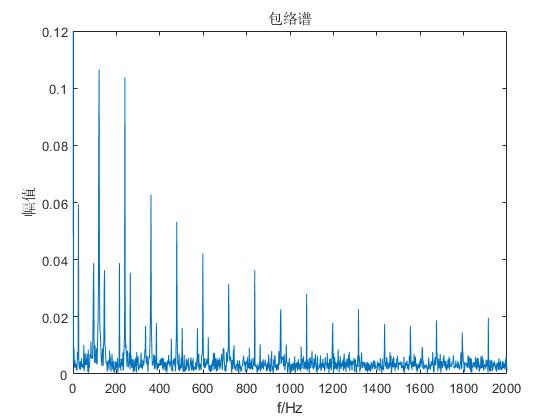
% 求信号的包络谱
[f2,EnvA1] = Envelope(y,fs);
完整的MATLAB代码地址如下:
参考文献
张俊, 张建群, 钟敏, 等. 基于PSO_VMD_MCKD方法的风机轴承微弱故障诊断[J]. 振动、测试与诊断, 2020,40(2):287-290.
以上是关于故障诊断基于PSO_VMD_MCKD方法的风机轴承微弱故障诊断的主要内容,如果未能解决你的问题,请参考以下文章