使用HAL对STM32F407ZGT6单片机移植FreeRTOS(参考正点原子)
Posted 果果小师弟
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了使用HAL对STM32F407ZGT6单片机移植FreeRTOS(参考正点原子)相关的知识,希望对你有一定的参考价值。
使用HAL对STM32F407ZGT6单片机移植FreeRTOS
我们既然要学习FreeRTOS,如果不是用STM32CubeMX来配置工程的话们就要去官网下载源码:https://www.freertos.org/
FreeRTOS源码下载
 下面这些文件就是需要移植到你的工程中去的。
下面这些文件就是需要移植到你的工程中去的。

include文件夹
include文件夹是一些头文件,移植的时候是需要的。

portable文件夹
portable这个文件夹,我们知道FreeRTOS是个系统,归根结底就是个纯软件的东西,它是怎么和硬件联系在一起的呢?软件到硬件中间必须有一个桥梁,portable文件夹里面的东西就是FreeRTOS系统和具体的硬件之间的连接桥梁!不同的编译环境,不同的MCU,其桥梁应该是不同的,打开 portable文件夹,如图所示
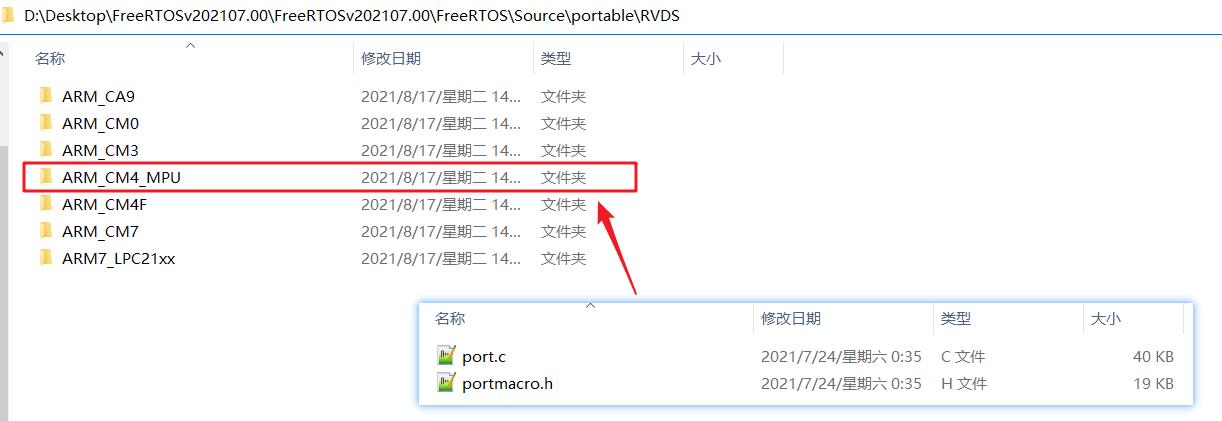
 从图中可以看出
从图中可以看出FreeRTOS针对不同的编译环境和MCU都有不同的桥梁,我们这里就以MDK编译环境下的STM32F407为例。MemMang这个文件夹是跟内存管理相关的,我们移植的时候是必须的,具体内容我们后面会专门有一章来讲解。Keil文件夹里面的东西肯定也是必须的,但是我们打开Keil件夹以后里面只有一个文件See-also-cthe-Rvds-directory.txt这个txt文件是什么鬼?别急嘛!看文件名字“See-also-the-VDS-directory”,意思就是参考RVDS文件夹里面的东西!哎,好吧,在打开RVDS文件夹,如图所示。ARM_CM4F有两个文件,这两个文件就是我们移植的时候所需要的!
移植FreeRTOS源码
1、添加 FreeRTOS源码
在基础工程中新建一个名为FreeRTOS的文件夹
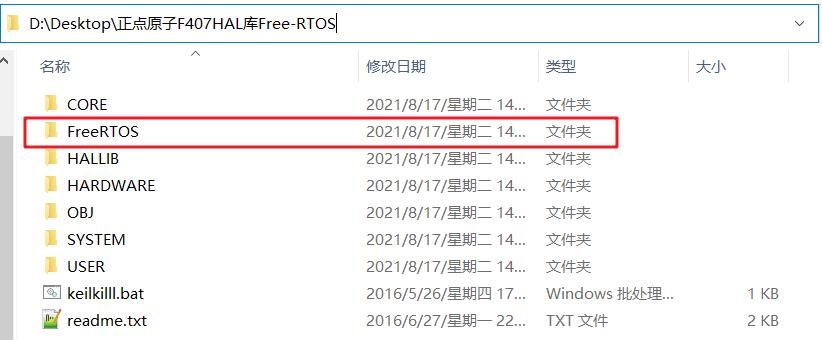
创建FreeRTOS文件夹以后就可以将FreeRTOS的源码添加到这个文件夹中,添加完以后如图
 在前面详细的讲解过
在前面详细的讲解过portable文件夹,我们只需要留下keil、MemMang和RVDS这三个文件夹,其他的都可以删除掉,完成以后如图所示:

2、向工程分组中添加文件
打开基础工程,新建分组FreeRTOS,然后向这两个分组中添加文件,如图所示
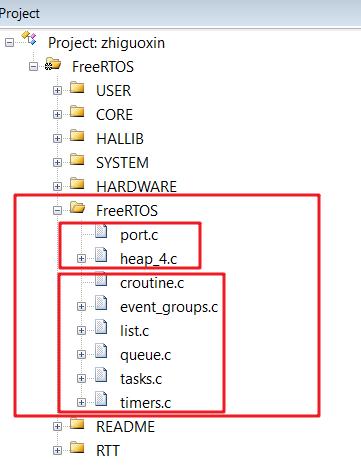
FreeRTOS分组中的port.c和heap4c是FreeRTOS的内核文件。其中port.c是RVDS文件夹下的ARM_CM4F中的文件,因为STM32F407是Cortex-M4内核并且带有FPU,因此要选择 ARM_CM4F中的 port.c文件。heap4.c是 MemMang文件夹中的,前面说了MemMang是跟内存管理相关的,里面有5个c文件:heap1.c、heap2.c、heap3.c、heap4.c和heap5.c。这5个c文件是五种不同的内存管理方法,就像从北京到上海你可以坐火车、坐飞机,如果心情好的话也可以走路,反正有很多种方法,只要能到上海就行。这里也一样的,这5个文件都可以用来作为FreeRTOS的内存管理文件,只是它们的实现原理不同,各有利弊。这里我们选择heap4.c。FreeRTOS分组中其他的几个文件来自工程FreeRTOS文件夹。
3、添加相应的头文件路径
添加完 FreeRTOS源码中的C文件以后还要添加FreeRTOS源码的头文件路径,头文件路径如所
 头文件路径添加完成以后编译一下,看看有没有什么错误,结果会发现提示打不开
头文件路径添加完成以后编译一下,看看有没有什么错误,结果会发现提示打不开FreeRTOSConfig.h这个文件,如图所示:
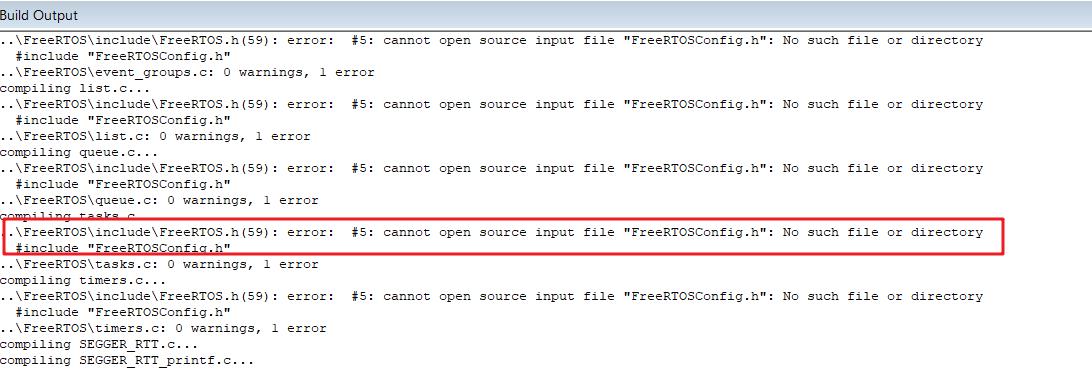 这是因为缺少
这是因为缺少 FreeRTOSConfig.h文件,这个文件在哪里找呢?你可以自己创建,显然这不是一个明智的做法。我们可以找找FreeRTOS的官方移植工程中会不会有这个文件,打开FreeRTOS针对STM32F407的移植工程文件,文件夹是CORTEX M4FSTM32F407ZG-SK,打开以后如图所示
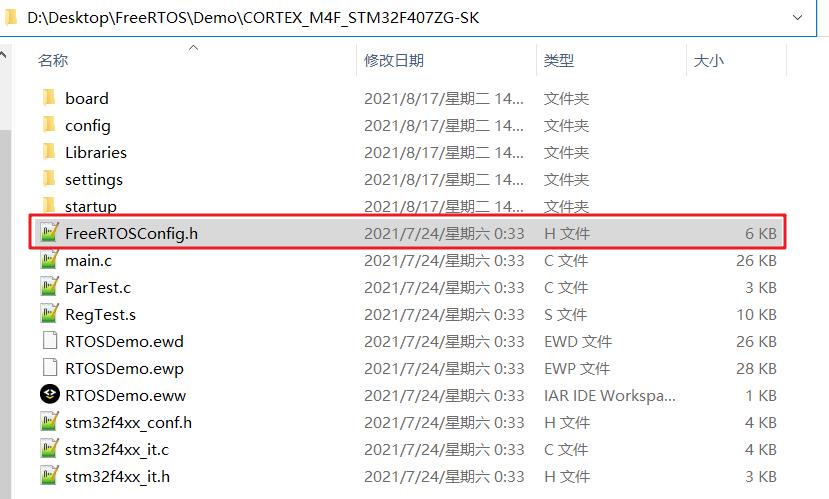 果然!官方的移植工程中有这个文件,二话不说复制到我们的工程中去,至于复制到什么地方大家可以自行决定,这里我为了方便放到了
果然!官方的移植工程中有这个文件,二话不说复制到我们的工程中去,至于复制到什么地方大家可以自行决定,这里我为了方便放到了FreeRTOS源码中的 include文件夹下。
FreeRTOSConfig.h是何方神圣?看名字就知道,他是FreeRTOS的配置文件,一般的操作系统都有裁剪、配置功能,而这些裁剪及配置都是通过一个文件来完成的,基本都是通过宏定义来完成对系统的配置和裁剪的。
到这里我们再编译一次,发现还是会提示有错误存在,如图所示
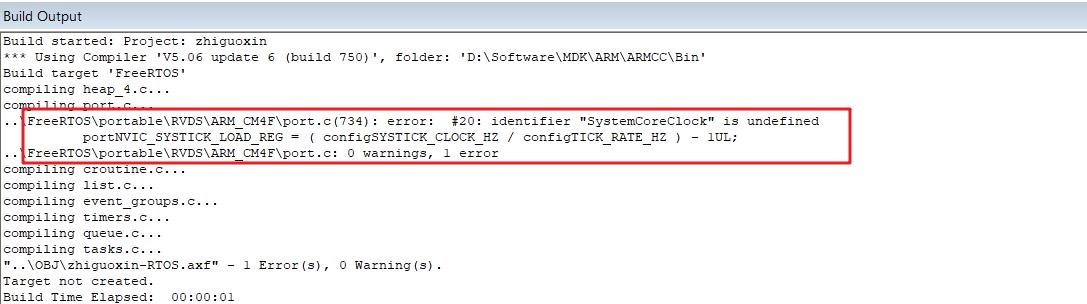 这次的错误是
这次的错误是SystemCoreClock未定义,这是因为在FreeRTOSConfig.h中使用到了System Core Clock来标记MCU的频率,如图所示
 注意,这里有个条件编译!只有定义
注意,这里有个条件编译!只有定义__ICCARM__以后下面的代码才有效
#include <stdint.h>
extern uint32 t SystemCoreClock
我们需要修改这个条件编译,修改后的代码如下:
#if defined (__ICCARM__)|| defined(__CC_ARM)|| defined(__GNUC__)
#include <stdint.h>
extern uint32_t SystemCoreClock;
#endif
继续编译一次,还是有错误,如图

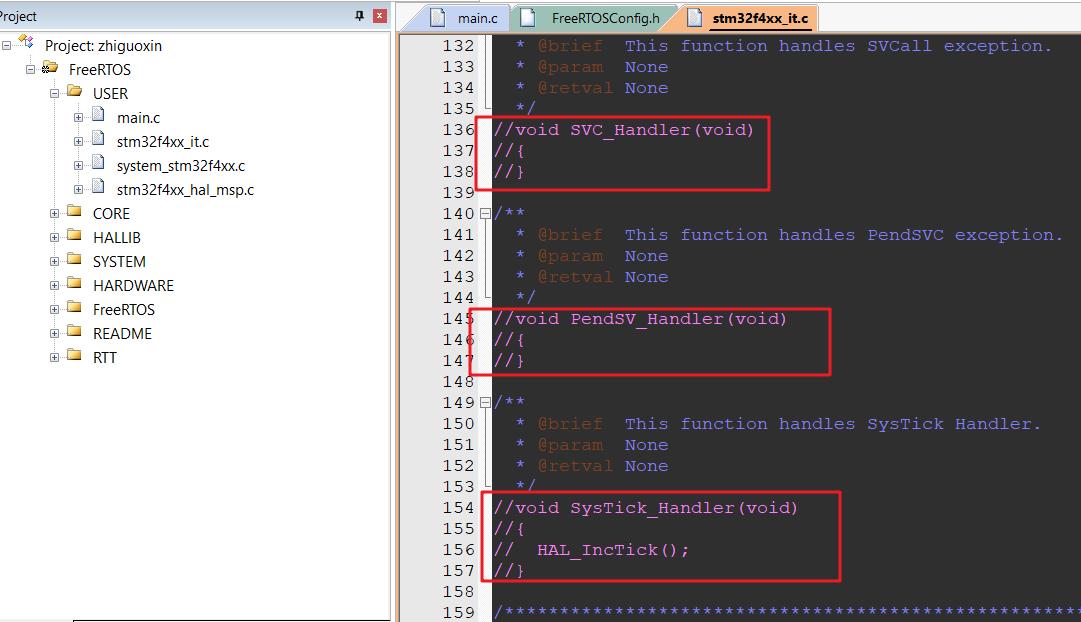
这是因为porc和stm32f4xx_it.c这两个文件中有重复定义的函数:Pendsv handler()
SVC_Handler()和 Systick_Handler(),这里屏蔽掉stm32f4xx_it.c中的PendSv handler()、SVC Handler和Systick Handler()这三个函数。
在编译一次,继续有错误,这次的错误是提示有一些未定义的函数,如图所示
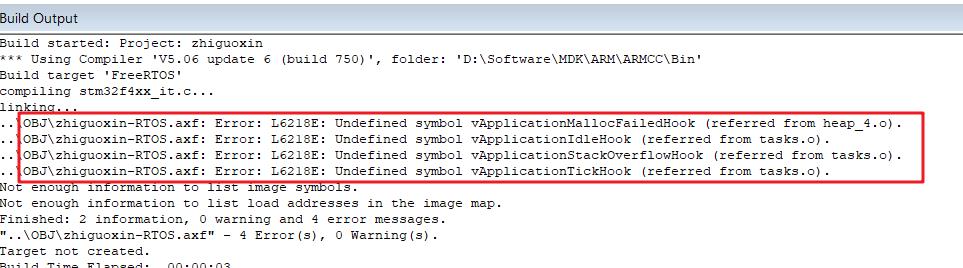 注意看这些未定义的函数,它们都是
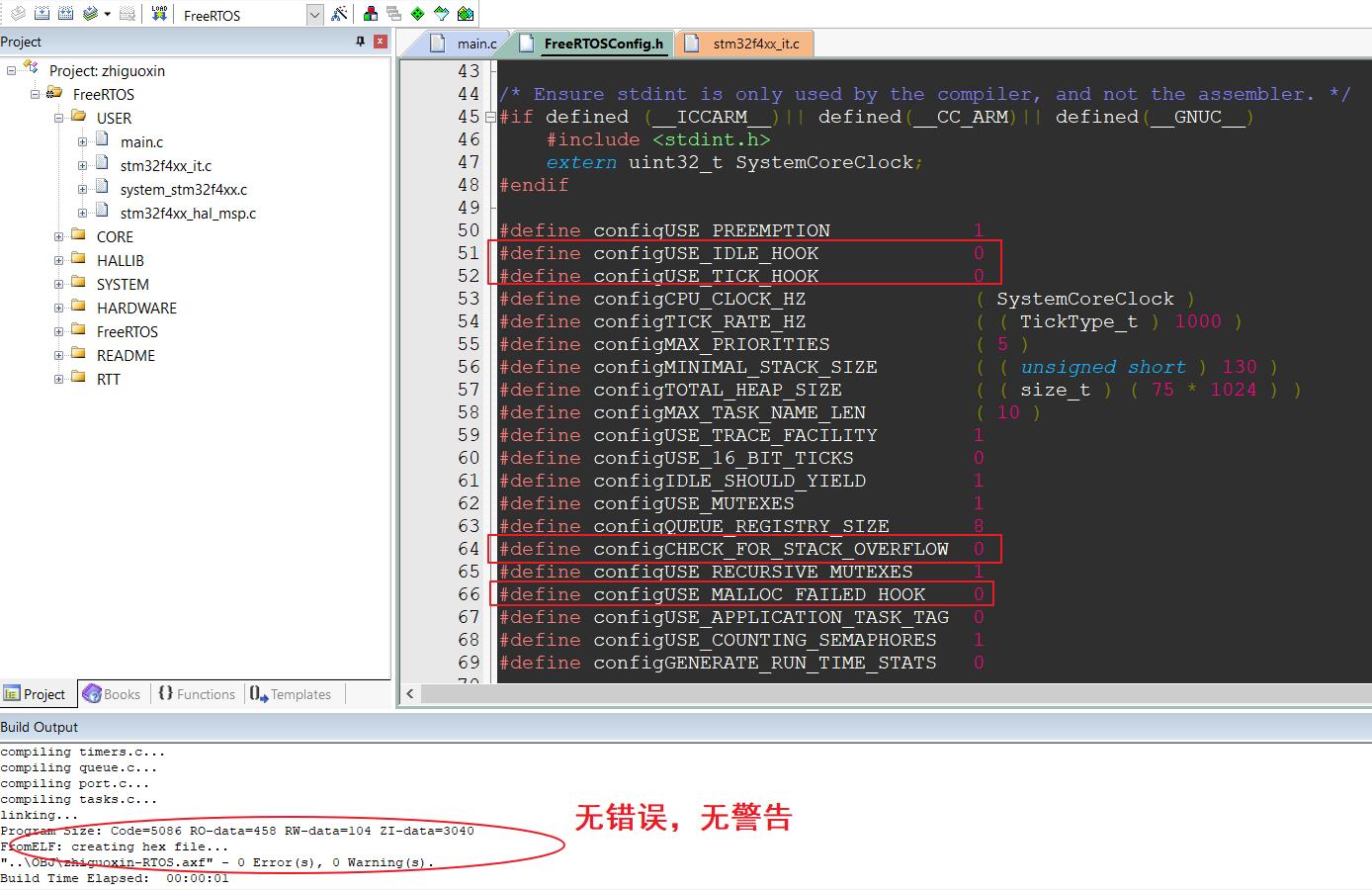
注意看这些未定义的函数,它们都是Hook结尾的,这些函数有个共同的名称:钩子函数,这是因为在FreeRTOSConfig.h中开启了这些钩子函数,但是却没有定义这些钩子函数而导致的,我们在FreeRTOSConfig.h中关闭这些钩子函数就行了,关闭的方法很简单,将相应的宏定义改为0即可,这里将宏 configUSE IDLE_HOOK、configUSE_TICK_HOOK configUSE_MALLOC_FALLED_HOOK和 configCHECK_FOR_STACK_ OVERFLOW定义为0最后编译一下,应该就没有错误了。
4、修改SYSTEM文件
SYSTEM文件夹里面的文件正点原子是针对UCOS而编写的,所以如果使用FreeRTOS的话就需要做相应的修改。
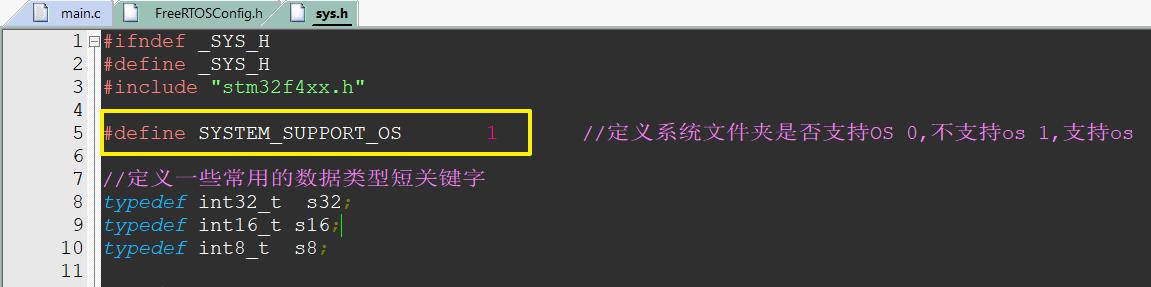
1、修改sys.h文件
sysh文件修改很简单,在sysh文件里面用宏SYSTEM_SUPPORT_OS来定义是否使用OS我们使用了 FreeRTOS,所以应该将宏SYSTEM_SUPPORT_OS改为1。
2、修改 usart.c文件
这里的usart.c文件也是要修改的,但是我们这里没有用串口,通的RTT来代替打印,所以就不需要修改。
3、修改 delay.c文件
delay.c文件修改的就比较大了,因为涉及到FreeRTOS的系统时钟,delay.c文件里面有4个函数,先来看一下函数SysTick_Handler,此函数是滴答定时器的中断服务函数,代码如下:
#include "delay.h"
#include "sys.h"
//如果使用OS,则包括下面的头文件即可
#if SYSTEM_SUPPORT_OS
#include "FreeRTOS.h" //FreeRTOS使用
#include "task.h"
#endif
static u8 fac_us=0; //us延时倍乘数
static u16 fac_ms=0; //ms延时倍乘数,在os下,代表每个节拍的ms数
extern void xPortSysTickHandler(void);
//systick中断服务函数,使用OS时用到
void SysTick_Handler(void)
{
if(xTaskGetSchedulerState()!=taskSCHEDULER_NOT_STARTED)//系统已经运行
{
xPortSysTickHandler();
}
}
//初始化延迟函数
//SYSTICK的时钟固定为AHB时钟,基础例程里面SYSTICK时钟频率为AHB/8
//这里为了兼容FreeRTOS,所以将SYSTICK的时钟频率改为AHB的频率!
//SYSCLK:系统时钟频率
void delay_init(u8 SYSCLK)
{
u32 reload;
HAL_SYSTICK_CLKSourceConfig(SYSTICK_CLKSOURCE_HCLK);//SysTick频率为HCLK
fac_us=SYSCLK; //不论是否使用OS,fac_us都需要使用
reload=SYSCLK; //每秒钟的计数次数 单位为M
reload*=1000000/configTICK_RATE_HZ; //根据configTICK_RATE_HZ设定溢出时间
//reload为24位寄存器,最大值:16777216,在168M下,约合0.0998s左右
fac_ms=1000/configTICK_RATE_HZ; //代表OS可以延时的最少单位
SysTick->CTRL|=SysTick_CTRL_TICKINT_Msk;//开启SYSTICK中断
SysTick->LOAD=reload; //每1/configTICK_RATE_HZ断一次
SysTick->CTRL|=SysTick_CTRL_ENABLE_Msk; //开启SYSTICK
}
//延时nus
//nus:要延时的us数.
//nus:0~204522252(最大值即2^32/fac_us@fac_us=168)
void delay_us(u32 nus)
{
u32 ticks;
u32 told,tnow,tcnt=0;
u32 reload=SysTick->LOAD; //LOAD的值
ticks=nus*fac_us; //需要的节拍数
told=SysTick->VAL; //刚进入时的计数器值
while(1)
{
tnow=SysTick->VAL;
if(tnow!=told)
{
if(tnow<told)tcnt+=told-tnow; //这里注意一下SYSTICK是一个递减的计数器就可以了.
else tcnt+=reload-tnow+told;
told=tnow;
if(tcnt>=ticks)break; //时间超过/等于要延迟的时间,则退出.
}
};
}
//延时nms
//nms:要延时的ms数
//nms:0~65535
void delay_ms(u32 nms)
{
if(xTaskGetSchedulerState()!=taskSCHEDULER_NOT_STARTED)//系统已经运行
{
if(nms>=fac_ms) //延时的时间大于OS的最少时间周期
{
vTaskDelay(nms/fac_ms); //FreeRTOS延时
}
nms%=fac_ms; //OS已经无法提供这么小的延时了,采用普通方式延时
}
delay_us((u32)(nms*1000)); //普通方式延时
}
//延时nms,不会引起任务调度
//nms:要延时的ms数
void delay_xms(u32 nms)
{
u32 i;
for(i=0;i<nms;i++)
delay_us(1000);
}
Freertos的心跳就是由滴答定时器产生的,根据 FreeRToS的系统时钟节拍设置好滴答定时器的周期,这样就会周期触发滴答定时器中断了。在滴答定时器中断服务函数中调用FreeRTOS的API函数 xPortSysTickHandler()
extern void xPortSysTickHandler(void);
//systick中断服务函数,使用OS时用到
void SysTick_Handler(void)
{
if(xTaskGetSchedulerState()!=taskSCHEDULER_NOT_STARTED)//系统已经运行
{
xPortSysTickHandler();
}
}
FreeRTOS的系统时钟是由滴答定时器提供的,那么肯定要根据 FreeRTOS的系统时钟节拍来初始化滴答定时器了,delay init()就是来完成这个功能的。FreeRTOS的系统时钟节拍由宏 configTICK_RATE_HZ来设置,这个值我们可以自由设置,但是一旦设置好以后我就要根据这个值来初始化滴答定时器,其实就是设置滴答定时器的中断周期。在基础例程中滴答定时器的时钟频率设置的是AHB的1/8,这里为了兼容FreeRTOS将滴答定时器的时钟频率改为了AHB,也就是168MHz!
void delay_init(u8 SYSCLK)
{
u32 reload;
HAL_SYSTICK_CLKSourceConfig(SYSTICK_CLKSOURCE_HCLK);//SysTick频率为HCLK
fac_us=SYSCLK; //不论是否使用OS,fac_us都需要使用
reload=SYSCLK; //每秒钟的计数次数 单位为M
reload*=1000000/configTICK_RATE_HZ; //根据configTICK_RATE_HZ设定溢出时间
//reload为24位寄存器,最大值:16777216,在168M下,约合0.0998s左右
fac_ms=1000/configTICK_RATE_HZ; //代表OS可以延时的最少单位
SysTick->CTRL|=SysTick_CTRL_TICKINT_Msk;//开启SYSTICK中断
SysTick->LOAD=reload; //每1/configTICK_RATE_HZ断一次
SysTick->CTRL|=SysTick_CTRL_ENABLE_Msk; //开启SYSTICK
}
delay_us()是us级延时函数,delay_ms()和delay_xms()都是ms级的延时函数,delay_us()和delay_xms()不会导致任务切换。delay_ms()其实就是对FreeRTOS中的延时函数VTaskDelay()的简单封装,所以在使用delay_ms()的时候就会导致任务切换。
delay.c修改完成以后编译一下,会提示如图示错误:

从图可以看出在port.c和delay.c中有重复定义的函数:SysTick Handler,二选一。
很明显delay.c中的SysTick_Handler得留下来,打开FreeRTOSConfig.h文件,找到如下一个宏定义:
#define xPortSysTickHandler SysTick_Handler
然后屏蔽掉此行代码就可以了。

总结
1、在官网下载源码
2、将源码添加到工程中
3、修改FreeRTOSConfigh文件配置
源码移植还是比较复杂的,后面使用stm32cubemx移植就简单多了,但是通过直接源码的移植能够更好的帮助我们理解FreeRTOS的文件配置。
以上是关于使用HAL对STM32F407ZGT6单片机移植FreeRTOS(参考正点原子)的主要内容,如果未能解决你的问题,请参考以下文章
STM32F4 HAL库开发 -- STM32F407引脚图
STM32F4 HAL库开发 -- STM32F407引脚图
STM32F4 HAL库开发 -- STM32F407引脚图
基于STM32单片机的LwIP协议LwIP 的TCP_client 上传数据温度电压数据到网络调试助手