技术分享 | 带你解读Kalibr和VINS标定参数
Posted 阿木实验室
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了技术分享 | 带你解读Kalibr和VINS标定参数相关的知识,希望对你有一定的参考价值。
我们通过上次的IMU和双目相机联合标定已经得到了一些文件,我们仅需要使用里面的一些文件,下面就带大家看下。
标定完大概会得到下面这几个文件,其中下面画红色圈的是最为重要的。 
1.相机标定参数解读 我们打开第一个文件后,可以看到 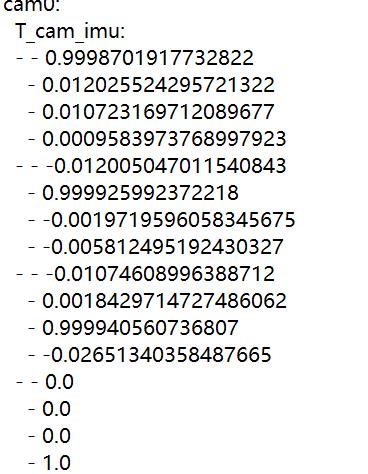 这个就是IMU和左目之间的变换矩阵,是最为重要的一个参数,如果这个精度低于1-2°,那么整个系统就会变得极为不鲁棒。下面还会有个右目的,这里就不在赘叙。
这个就是IMU和左目之间的变换矩阵,是最为重要的一个参数,如果这个精度低于1-2°,那么整个系统就会变得极为不鲁棒。下面还会有个右目的,这里就不在赘叙。
再往下看,下面就是相机的一些内参。
distortion_coeffs指的是畸变参数,针孔相机一般默认k3为零。
Intrinsics 指的是相机内参数。
最后一行为相机和IMU之间的时间戳。 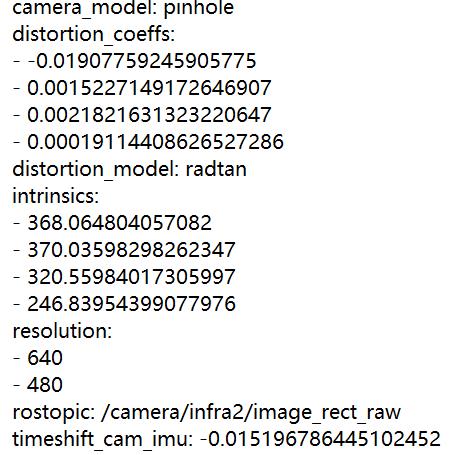
2.IMU参数解读 我们再打开imu这个文件,就是IMU被标定出来的误差。陀螺仪和加速度计的噪声,以及随机游走。 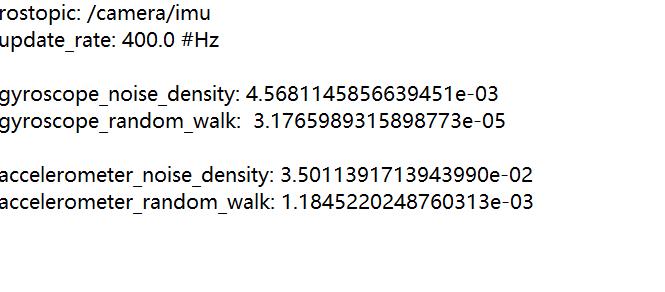 还有一个PDF文件过于花哨,这里不展示了。 到此为止,我们就基本解读了一下标定结果。我们现在要做的就是把它们用到VINS中。
还有一个PDF文件过于花哨,这里不展示了。 到此为止,我们就基本解读了一下标定结果。我们现在要做的就是把它们用到VINS中。
3.VINS配置参数文件 3.1首先是订阅的话题 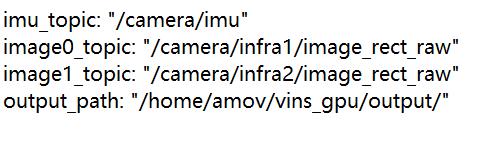 这里的话题名称是根据你自己的决定,但是如果传感器用的是D435i,那么话题名称基本不用修改。
这里的话题名称是根据你自己的决定,但是如果传感器用的是D435i,那么话题名称基本不用修改。
3.2双目相机的内参 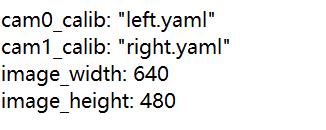 读取当前路径下双目相机的内参配置文件,以及图像发布大小。
读取当前路径下双目相机的内参配置文件,以及图像发布大小。
3.3IMU和相机之间的变换矩阵 下面是IMU坐标系和Camera坐标系之间的相对变换矩阵,主要是旋转矩阵比较重要,平移向量对系统鲁棒性影响较小。 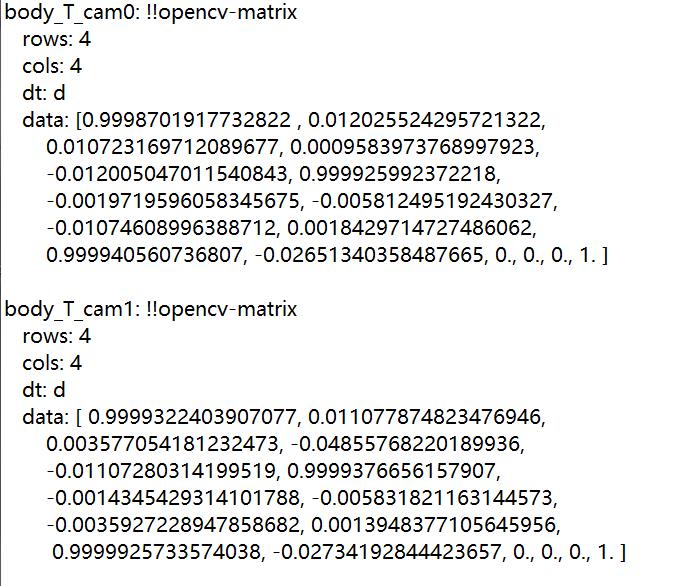
3.4特征点跟踪的一些参数 
3.5优化参数 
3.6IMU参数,这个可以由之前的标定得到 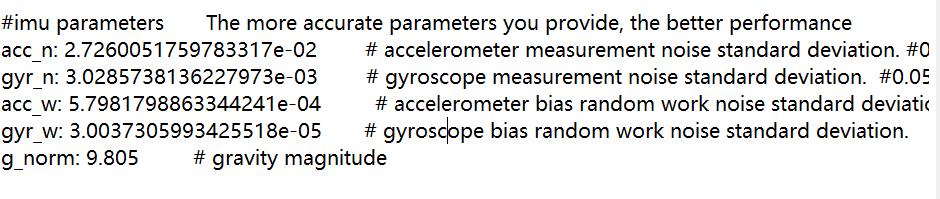
3.7在线估计同步时间差  到此为止我们解读完了所有需要用到的参数,接下来就是正确的把它们用到VINS中。
到此为止我们解读完了所有需要用到的参数,接下来就是正确的把它们用到VINS中。
- End -
技术发展的日新月异,阿木实验室将紧跟技术的脚步,不断把机器人行业最新的技术和硬件推荐给大家。看到经过我们培训的学员在技术上突飞猛进,是我们培训最大的价值。如果你在机器人行业,就请关注我们的公众号,我们将持续发布机器人行业最有价值的信息和技术。 阿木实验室致力于前沿IT科技的教育和智能装备,让机器人研发更高效!
以上是关于技术分享 | 带你解读Kalibr和VINS标定参数的主要内容,如果未能解决你的问题,请参考以下文章