学习笔记之——激光雷达SLAM(LOAM系列的复现与学习)
Posted gwpscut
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了学习笔记之——激光雷达SLAM(LOAM系列的复现与学习)相关的知识,希望对你有一定的参考价值。
概述
SLAM问题被认为是真正意义上实现机器人自主移动的关键。其问题可以理解为如下的生活问题。
当你来到一个陌生的环境时,为了迅速熟悉环境并完成自己的任务(比如找饭馆,找旅馆),你应当做以下事情:
-
a.用眼睛观察周围地标如建筑、大树、花坛等,并记住他们的特征(特征提取)
-
b.在自己的脑海中,根据双目获得的信息,把特征地标在三维地图中重建出来(三维重建)
-
c.当自己在行走时,不断获取新的特征地标,并且校正自己头脑中的地图模型(
bundle adjustment or EKF) -
d.根据自己前一段时间行走获得的特征地标,确定自己的位置(
trajectory) -
e.当无意中走了很长一段路的时候,和脑海中的以往地标进行匹配,看一看是否走回了原路(
loop-closure detection)。实际这一步可有可无。
以上五步是同时进行的,因此是simultaneous localization and mapping。
目前用在SLAM上的Sensor主要分两大类,激光雷达和摄像头。


由于Sensor和需求的不同,SLAM的呈现形式略有差异。大致可以分为激光SLAM(也分2D和3D)和视觉SLAM(也分Sparse、semiDense、Dense)两类,但其主要思路大同小异。
SLAM算法在实现的时候主要要考虑以下4个方面吧:
-
地图表示问题,比如dense和sparse都是它的不同表达方式,这个需要根据实际场景需求去抉择
-
信息感知问题,需要考虑如何全面的感知这个环境,RGBD摄像头FOV通常比较小,但激光雷达比较大
-
数据关联问题,不同的sensor的数据类型、时间戳、坐标系表达方式各有不同,需要统一处理
-
定位与构图问题,就是指怎么实现位姿估计和建模,这里面涉及到很多数学问题,物理模型建立,状态估计和优化
其他的还有回环检测问题,探索问题(exploration),以及绑架问题(kidnapping)。
本博文主要学习激光雷达SLAM,激光雷达传感器利用光原理进行工作,激光雷达代表光探测和测距。它们可以探测到300米以内的障碍物,并准确估计它们的位置。在自动驾驶汽车中,这是用于位置估计的最精确的传感器。

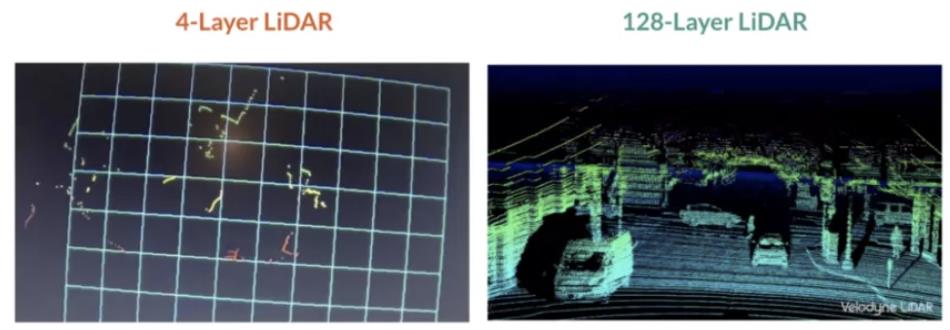
激光雷达传感器由两部分组成:激光发射(顶部)和激光接收(底部)。发射系统的工作原理是利用多层激光束,层数越多,激光雷达就越精确。层数越多,传感器就越大。激光被发射到障碍物并反射,当这些激光击中障碍物时,它们会产生一组点云,传感器与飞行时间(TOF)进行工作,从本质上说,它测量的是每束激光反射回来所需的时间。如下图:

当激光雷达的质量和价格非常高时,激光雷达是可以创建丰富的三维环境,并且每秒最多可以发射200万个点。点云表示三维世界激光雷达传感器获得每个撞击点的精确(X,Y,Z)位置。
激光雷达传感器可以是固态的,也可以是旋转的,固态激光雷达将把检测的重点放在一个位置上,并提供一个覆盖范围(比如FOV为90° )。在后一种情况下,它将围绕自身旋转,并提供360度旋转。在这种情况下,一般把它放在设备顶上,以提高能见度。
激光雷达很少用作独立传感器。它们通常与相机或雷达结合在一起,这一过程称为传感器融合。融合过程可分为早期融合和后期融合。早期融合是指点云与图像像素融合,后期融合是指单个检测物的融合。
激光雷达进行障碍物的步骤通常分为4个步骤:
-
点云处理
-
点云分割
-
障碍聚类
-
边界框拟合
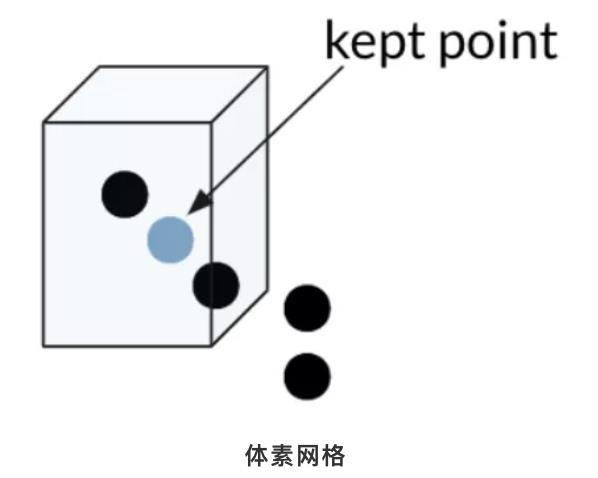
为了处理点云,我们可以使用最流行的库PCL(point cloud library)。它在Python中可用,但是在C++中使用它更为合理,因为语言更适合机器人学。它也符合ROS(机器人操作系统)。PCL库可以完成探测障碍物所需的大部分计算,从加载点到执行算法。这个库相当于OpenCV的计算机视觉。因为激光雷达的输出很容易达到每秒100000个点,所以我们需要使用一种称为体素网格的方法来对点云进行下采样。体素网格是一个三维立方体,通过每个立方体只留下一个点来过滤点云。立方体越大,点云的最终分辨率越低。最终,我们可以将点云的采样从几万点减少到几千点。
滤波完成后我们可以进行的第二个操作是ROI(感兴趣区域)的提取,我们只需删除不属于特定区域的每一些点云数据,例如左右距离10米以上的点云,前后超过100米的点云都通过滤波器滤除。现在我们有了降采样并滤波后的点云了,此时可以继续进行点云的分割、聚类和边界框实现。
点云分割任务是将场景与其中的障碍物分离开来,其实就是地面的分割。一种非常流行的分割方法称为RANSAC(RANdom Sample consenses)。该算法的目标是识别一组点中的异常值。点云的输出通常表示一些形状。有些形状表示障碍物,有些只是表示地面上的反射。RANSAC的目标是识别这些点,并通过拟合平面或直线将它们与其他点分开。
 为了拟合直线,我们可以考虑线性回归。但是有这么多的异常值,线性回归会试图平均结果,而得出错误的拟合结果,与线性回归相反,这里的ransac算法将识别这些异常值,且不会拟合它们。
为了拟合直线,我们可以考虑线性回归。但是有这么多的异常值,线性回归会试图平均结果,而得出错误的拟合结果,与线性回归相反,这里的ransac算法将识别这些异常值,且不会拟合它们。

如上图所示我们可以将这条线视为场景的目标路径(即道路),而孤立点则是障碍物。它是如何工作的?
过程如下:
-
随机选取2个点
-
将线性模型拟合到这些点计算每隔一点到拟合线的距离。如果距离在定义的阈值距离公差范围内,则将该点添加到内联线列表中。
因此需要算法一个参数:距离阈值。
最后选择内点最多的迭代作为模型;其余的都是离群值。这样,我们就可以把每一个内点视为道路的一部分,把每一个外点视为障碍的一部分。RANSAC应用在3D点云中。在这种情况下,3个点之间的构成的平面是算法的基础。然后计算点到平面的距离。
下面点云上RANSAC算法的结果。紫色区域代表车辆。
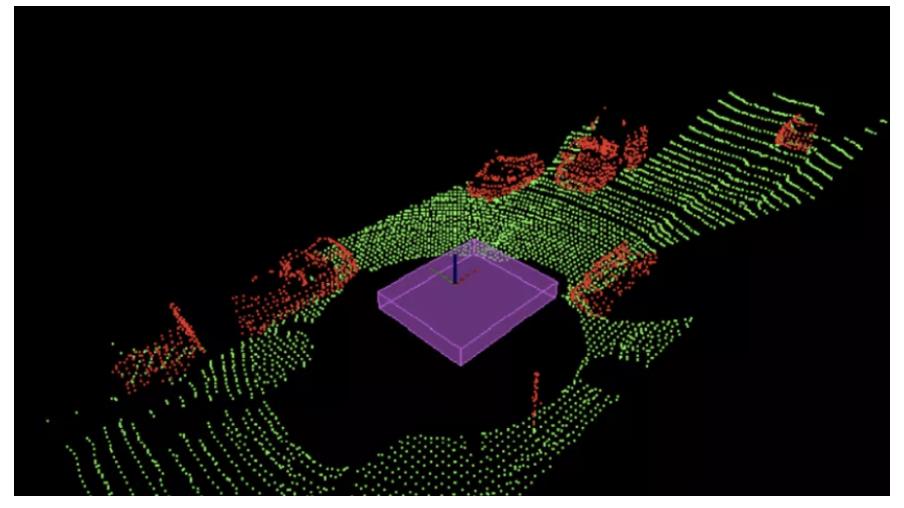
RANSAC是一个非常强大和简单的点云分割算法。它试图找到属于同一形状的点云和不属于同一形状的点云,然后将其分开。
LOAM
LOAM是Ji Zhang早期开源的多线LiDAR SLAM算法。该代码可读性很差,作者后来将其闭源。其效果如下:

A-LOAM
A-LOAM是港科大秦通博士(VINS-Mono一作)在LOAM原有代码基础上,使用Ceres-solver和Eigen库对其进行重构和优化,在保持原有算法原理的基础上,使其可读性大大增加,作为入门多线激光slam最好选择。
先基于作者的github工程(https://github.com/HKUST-Aerial-Robotics/A-LOAM)来构建环境进行数据集测试。
LeGO-LOAM
LeGO-LOAM 是Tixiao Shan在原有LOAM基础上,做了一些改进包括:1、对前端里程计的前量化改造,提取地面点更适配水平安装的LiDAR; 2、使用SLAM中的Keyframe概念以及回环检测位姿图优化的方式对后端进行重构。

LIO-SAM
LIO-SAM 是Tixiao Shan在LeGO-LOAM的扩展,添加了IMU预积分因子和GPS因子:前端使用紧耦合的IMU融合方式,替代原有的帧间里程计,使得前端更轻量;后端沿用LeGO-LOAM,在此基础上融入了GPS观测。同时前端后端相互耦合,提高系统精度。

CCM- SLAM
除了激光雷达slam外,本博文也跑了一下CMM-SLAM,基于单目camera,多个机器人的collaboration SLAM。
CCM(centralized,collaborative,monocular cmaera)
首先编译两个库
进入ccm_slam/cslam/thirdparty/DBoW2/然后运行
mkdir build
cd build
cmake ..
make -j8进入g2o然后运行
cd ~/ccmslam_ws/src/ccm_slam/cslam/thirdparty/g2o
mkdir build
cd build
cmake --cmake-args -DG2O_U14=0 ..
make -j8Unzip Vocabulary:
cd ~/ccmslam_ws/src/ccm_slam/cslam/conf
unzip ORBvoc.txt.zip直接在当前工作空间做好像不行。。。新建一个工作空间试试~
按照github里面的教程步骤走即可( 注意若为ubuntu18.04需要将里面的ros版本改为melodic)
编译的时候如果出现报错,可以修改其中的cpp文件
/home/kwanwaipang/ccmslam_ws/src/ccm_slam/cslam/src/KeyFrame.cpp
// size_t KeyFrame::nNextId=0;
long unsigned int KeyFrame::nNextId=0;然后再编译一下就成功了~
注意每次运行都应该先source一下工作空间
source ~/ccmslam_ws/devel/setup.bash通过下面命令开启服务
roslaunch ccmslam Server.launch写一个sh文件如下
#! /bin/bash
###############################################################
gnome-terminal -t "server" -x bash -c "roslaunch ccmslam Server.launch;exec bash;"
sleep 15
gnome-terminal -t "agent1" -x bash -c "roslaunch ccmslam Client0_euroc.launch;exec bash;"
gnome-terminal -t "agent2" -x bash -c "roslaunch ccmslam Client1_euroc.launch;exec bash;"
gnome-terminal -t "agent3" -x bash -c "roslaunch ccmslam Client2_euroc.launch;exec bash;"
gnome-terminal -t "agent4" -x bash -c "roslaunch ccmslam Client3_euroc.launch;exec bash;"
sleep 15
gnome-terminal -t "rviz" -x bash -c "cd /home/kwanwaipang/ccmslam_ws/src/ccm_slam/cslam; rviz -d conf/rviz/ccmslam.rviz;exec bash;"
#如果roscd报错的话就直接用cd
sleep 15
gnome-terminal -t "agentbag1" -x bash -c "cd /home/kwanwaipang/下载;rosbag play MH_01_easy.bag --start 45;exec bash;"
#cd 数据集包所在的位置
gnome-terminal -t "agentbag2" -x bash -c "cd /home/kwanwaipang/下载;rosbag play MH_02_easy.bag --start 35 /cam0/image_raw:=/cam0/image_raw1;exec bash;"
gnome-terminal -t "agentbag2" -x bash -c "cd /home/kwanwaipang/下载;rosbag play MH_03_medium.bag --start 15 /cam0/image_raw:=/cam0/image_raw2;exec bash;"
gnome-terminal -t "agentbag2" -x bash -c "cd /home/kwanwaipang/下载;rosbag play MH_04_difficult.bag --start 15 /cam0/image_raw:=/cam0/image_raw3;exec bash;" EuRoC dataset数据集下载
https://projects.asl.ethz.ch/datasets/doku.php?id=kmavvisualinertialdatasets
实验视频结果如下:
(ccmslam)基于三个agents的单目SLAM地图融合
参考资料:
github
https://github.com/RobustFieldAutonomyLab/LeGO-LOAM(LeGO-LOAM)
https://github.com/gisbi-kim/SC-LIO-SAM
https://github.com/HKUST-Aerial-Robotics/A-LOAM
https://github.com/hku-mars/loam_livox
https://github.com/engcang/SLAM-application
https://github.com/cuitaixiang/LOAM_NOTED/tree/master/papers
https://github.com/VIS4ROB-lab/ccm_slam
其他资源
https://mp.weixin.qq.com/s/1Z09E0UqgmKwVeua1etLdg
https://mp.weixin.qq.com/s/9tnmdHVY1PHiJidQD7JsLw
https://mp.weixin.qq.com/s/axUIBO_3jBL_F7hzKL6F1w(关于LiDAR的发展,参考此链接)
https://mp.weixin.qq.com/s/OMuR8D9w9w4LNcLaweDVng(关于LiDAR如何检测障碍物)
以上是关于学习笔记之——激光雷达SLAM(LOAM系列的复现与学习)的主要内容,如果未能解决你的问题,请参考以下文章