目标检测任务描述
Posted ZSYL
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了目标检测任务描述相关的知识,希望对你有一定的参考价值。
学习目标
- 目标
- 了解目标检测算法分类
- 知道目标检测的常见指标IoU
- 了解目标定位的简单实现方式
1. 目标检测算法分类
-
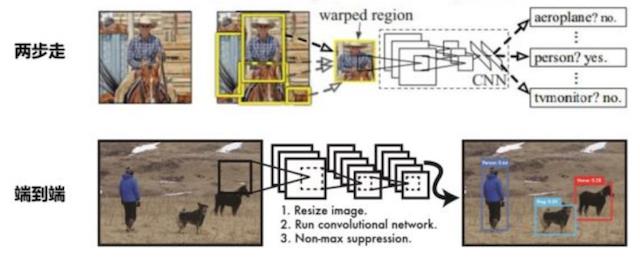
两步走的目标检测:先进行区域推荐,而后进行目标分类
- 代表:R-CNN、SPP-net、Fast R-CNN、Faster R-CNN
-
端到端的目标检测:采用一个网络一步到位
- 代表:YOLO、SSD
2. 目标检测的任务
2.1 分类原理回顾
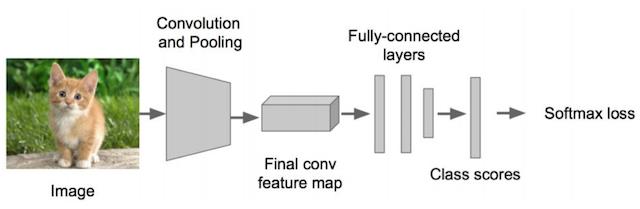
先来回归下分类的原理,这是一个常见的CNN组成图,输入一张图片,经过其中卷积、激活、池化相关层,最后加入全连接层达到分类概率的效果

- 分类的损失与优化
在训练的时候需要计算每个样本的损失,那么CNN做分类的时候使用softmax函数计算结果,损失为交叉熵损失
- 常见CNN模型

对于目标检测来说不仅仅是分类这样简单的一个图片输出一个结果,而且还需要输出图片中目标的位置信息,所以从分类到检测,如下图标记了过程:
- 分类

- 目标检测
2.2 检测的任务
- 分类:
- N个类别
- 输入:图片
- 输出:类别标签
- 评估指标:Accuracy

- 定位:
- N个类别
- 输入:图片
- 输出:物体的位置坐标
- 主要评估指标:IOU
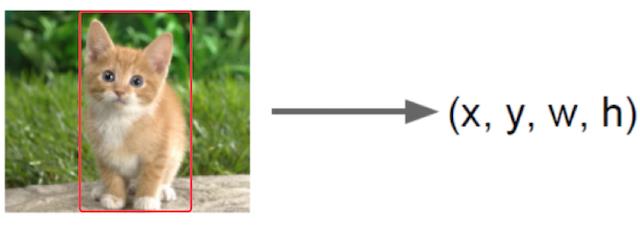
其中我们得出来的(x,y,w,h)有一个专业的名词,叫做bounding box(bbox).
- 物体位置:
- x, y, w,h:x,y物体的中心点位置,以及中心点距离物体两边的长宽
- xmin, ymin, xmax, ymax:物体位置的左上角、右下角坐标
3.1 目标定位的简单实现思路
在分类的时候我们直接输出各个类别的概率,如果再加上定位的话,我们可以考虑在网络的最后输出加上位置信息。
3.1 回归位置
增加一个全连接层,即为FC1、FC2
-
FC1:作为类别的输出
-
FC2:作为这个物体位置数值的输出
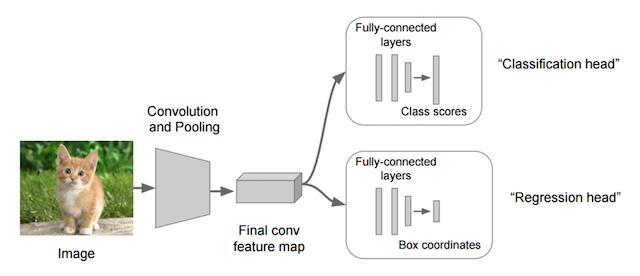
假设有10个类别,输出[p1,p2,p3,…,p10],然后输出这一个对象的四个位置信息[x,y,w,h]。同理知道要网络输出什么,如果衡量整个网络的损失
- 对于分类的概率,还是使用交叉熵损失
- 位置信息具体的数值,可使用MSE均方误差损失(L2损失)
如下图所示:

4. 两种Bounding box名称
在目标检测当中,对bbox主要由两种类别。
- Ground-truth bounding box:图片当中真实标记的框
- Predicted bounding box:预测的时候标记的框
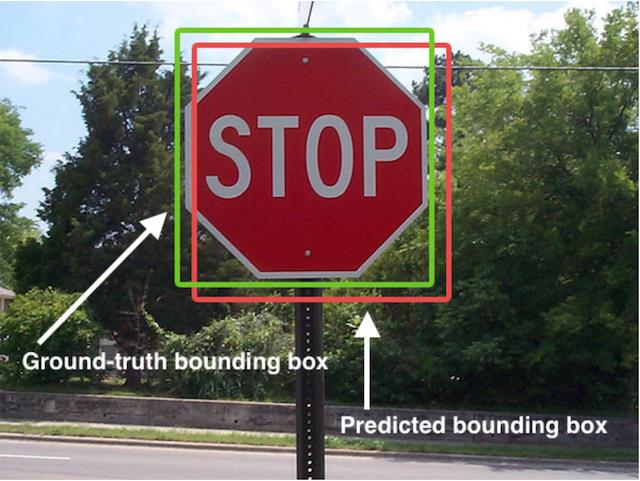
一般在目标检测当中,我们预测的框有可能很多个,真实框GT也有很多个。
加油!
感谢!
努力!
以上是关于目标检测任务描述的主要内容,如果未能解决你的问题,请参考以下文章
详细解读TPH-YOLOv5 让目标检测任务中的小目标无处遁形
改进YOLOv7系列:首发最新结合多种X-Transformer结构新增小目标检测层,让YOLO目标检测任务中的小目标无处遁形