Pytorch—万字入门SSD物体检测
Posted Eloik
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了Pytorch—万字入门SSD物体检测相关的知识,希望对你有一定的参考价值。
文章目录


前言
由于初入物体检测领域,我在学习SSD模型的时候遇到了很多的困难。一部分困难在于相关概念不清楚,专业词汇不知其意,相关文章不知所云;另一部分困难在于网上大部分文章要么只是简要介绍了SSD的总体原理,要么就是直接实战。SSD作者的论文也已看过,但是看的还是蒙圈蒙圈的。
我决定通过代码来了解其原理,首先参考了https://blog.csdn.net/weixin_44791964/article/details/104981486这篇文章的代码,但是并没有看懂(I’m too vegetable),然后去GitHub上去搜了一下,一页的搜索结果恰好点到了这个项目,https://github.com/sgrvinod/a-PyTorch-Tutorial-to-Object-Detection,于是,困扰我的一些问题终于看到了通路,这个作者对SSD关键的介绍非常清晰,代码也是一目了然。我决定在其中添加自己的理解,并对代码进行一些修改加解读,一方面帮助我更清楚的理解物体检测,一方面帮助像我一样的人入门物体检测。
概念
在实现模型之前,我们需要对一些常见概念词进行了解,后面大多数直接使用原英文单词说明,当然这里只是粗略的解释,是为了让你明白一些专业的术语,即使不理解其含义也并无大碍,在文章中途会结合代码进行更详细的解释。
- Object Detection(物体检测):懂得都懂
- Single-Shot Detection(单步检测) : 早期的物体检测模型结构由两部分组成——一个region proposal network(区域建议网络)用来定位物体的位置,一个classifier(分类器)检测建议区域中物体的类别。这种分两步的模型很消耗算力,因此它们不适合用来做实时检测。单步检测模型将定位与分类封装在一次前向计算中,大大提高了检测速度,同时使得模型可以部署在轻量级硬件中。
- Multiscale Feature Maps(多尺度特征图):在图像分类任务中,我们根据最后一个卷积特征图(原始图像的最小也是最深的表达)进行预测。在物体检测任务中,中间的卷积特征图也非常有用,因为它们代表了原图像不同的缩放比例。因此,由于这些特征图自带缩放,一个固定大小的 filter(滤波器,也就是卷积中的卷积核)在不同的特征图上进行运算,就能够检测到各种大小的物体。
- Priors(先验,以后只用英文单词):这些 priors boxes(先验框)是在 特定尺度的特征图 上 特定位置 预先生成的 boxes(框),它们有特定的 aspect ratios(长宽比) 和 scales(比例)。它们是精心选择的,用来匹配数据集中物体边界框(也叫 ground truths,这个词经常使用,记住它指的就是数据集中物体的真实标记框)的特征。
- Multibox(实在不好翻译,在后面会有更加清楚的解释):这是一项将预测物体边界框的任务转变为一个回归任务的技术,被检测物体的坐标将被回归到对应它的真实框的坐标。同时,对每一个预测框,会生成每一个类别的分数(框内的物体就属于分数最高的类别,这与图像分类任务一样)。priors(先验框) 可以作为可行的起点, 因为它们是以 ground truths(真实框) 为依据的。因此将会有和priors一样多的预测框,但是大多数预测框不包含物体。
- Hard Negative Mining(硬负采样):它明确指明了模型选择预测最错误的假正例(即背景类),强迫模型通过这些样例进行学习。换句话说,我们只对那些最难正确识别的错误因素进行采样。在物体检测任务中,我们生成的先验框非常多(SSD中为8732个),不难想象这些 priors 绝大部分是不包含任何物体的,因此,对于分类任务,这导致了严重的样本不均衡,会使预测结果变得非常差,硬负采样只让模型学习最难被识别的背景类,这极大减少了负样本的数量,有利于平衡正负样本。
- Non-Maximum Suppression(NMS,非极大抑制):我们生成的 priors 最终预测时将会有一部分重叠程度非常大的预测框,这些重叠程度大的预测框可能预测的是同一个物体, NMS(非极大抑制)是一种消除冗余预测的方法,它将删除除预测最高分之外其他所有重叠程度大的预测框。
综述
在本部分,我将介绍SSD模型的概述。在我们继续进行下去的过程中,你应该会注意到相当多的工程设计导致了SSD非常特殊的结构和方法。如果你觉得有些步骤和方法显得十分不自然(具有明显的人为倾向,没有理论支持,或者难以理解为何这样做),不用担心,请记住,它是建立在这个领域多年的研究(通常是经验性的)上的。
Bounding box(边界框)
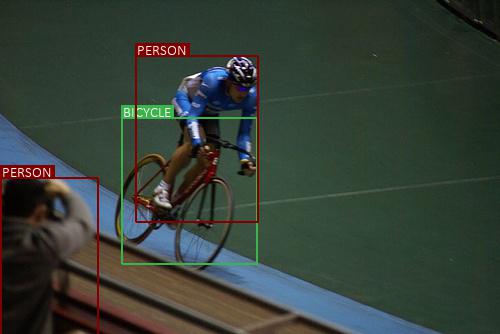
bounding box(边界框)就是包裹着一个物体的盒子,代表着这个物体的界限。在本教程中我们只会遇到两种类型——普通框(不含物体的框)和边界框。但是所有的框都是在图像上表示的,我们需要能够测量它们的位置、形状、大小和其他属性。
Boundary coordinates(边界坐标)
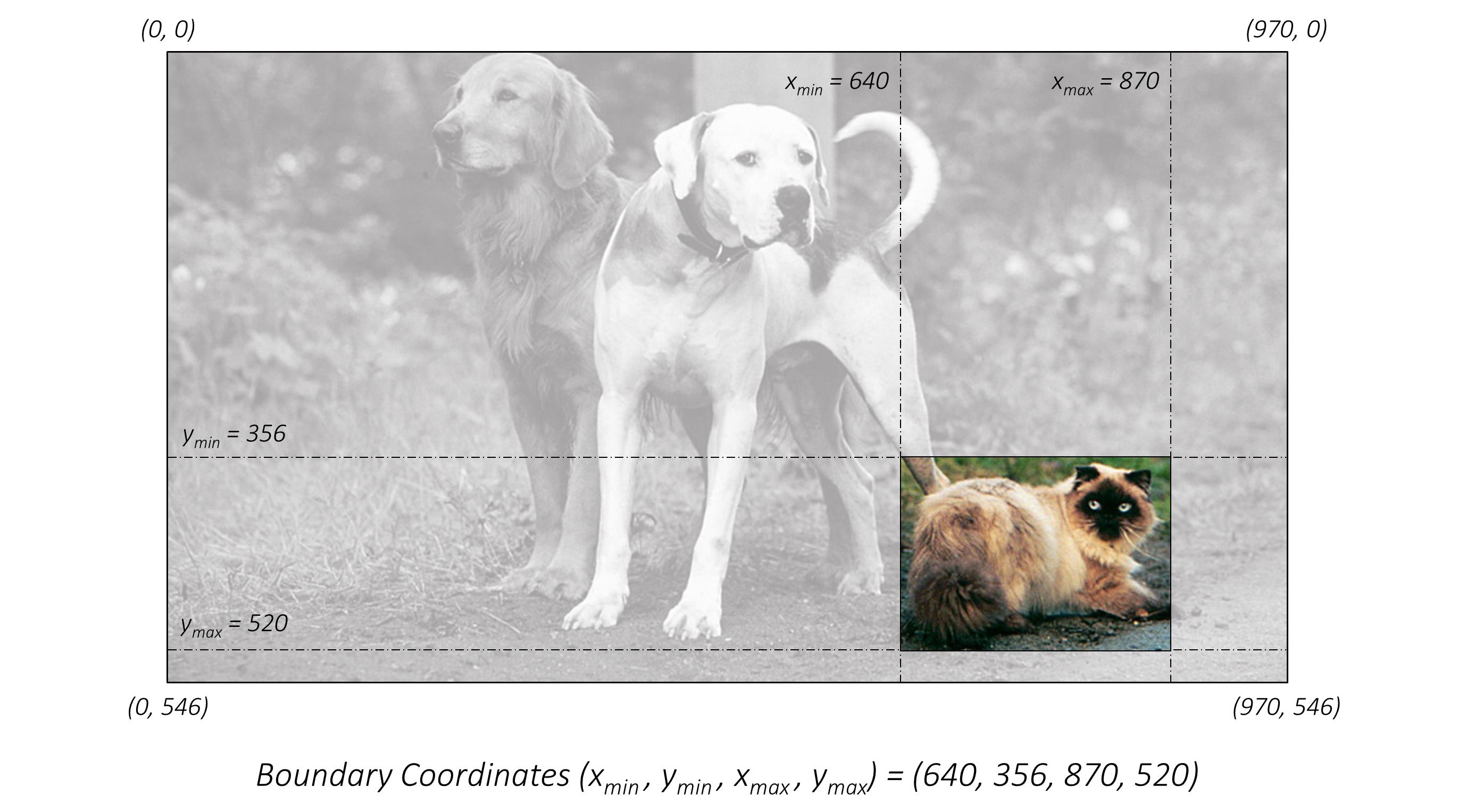
表示一个框的最明显的方法就是使用构成其边界的线的像素坐标。一个框的边界坐标很简单的表示为
(
x
m
i
n
,
y
m
i
n
,
x
m
a
x
,
y
m
a
x
)
(x_{min}, y_{min}, x_{max}, y_{max})
(xmin,ymin,xmax,ymax) ,也就是框的左上角和右下角坐标 ,如下图所示。
但是如果我们不知道图像的实际大小,这种坐标将毫无意义。更好的方法是将所有坐标表示为比例的形式,即将
x
x
x 坐标值除以图像的宽度,将
y
y
y 坐标值除以图像的高度。
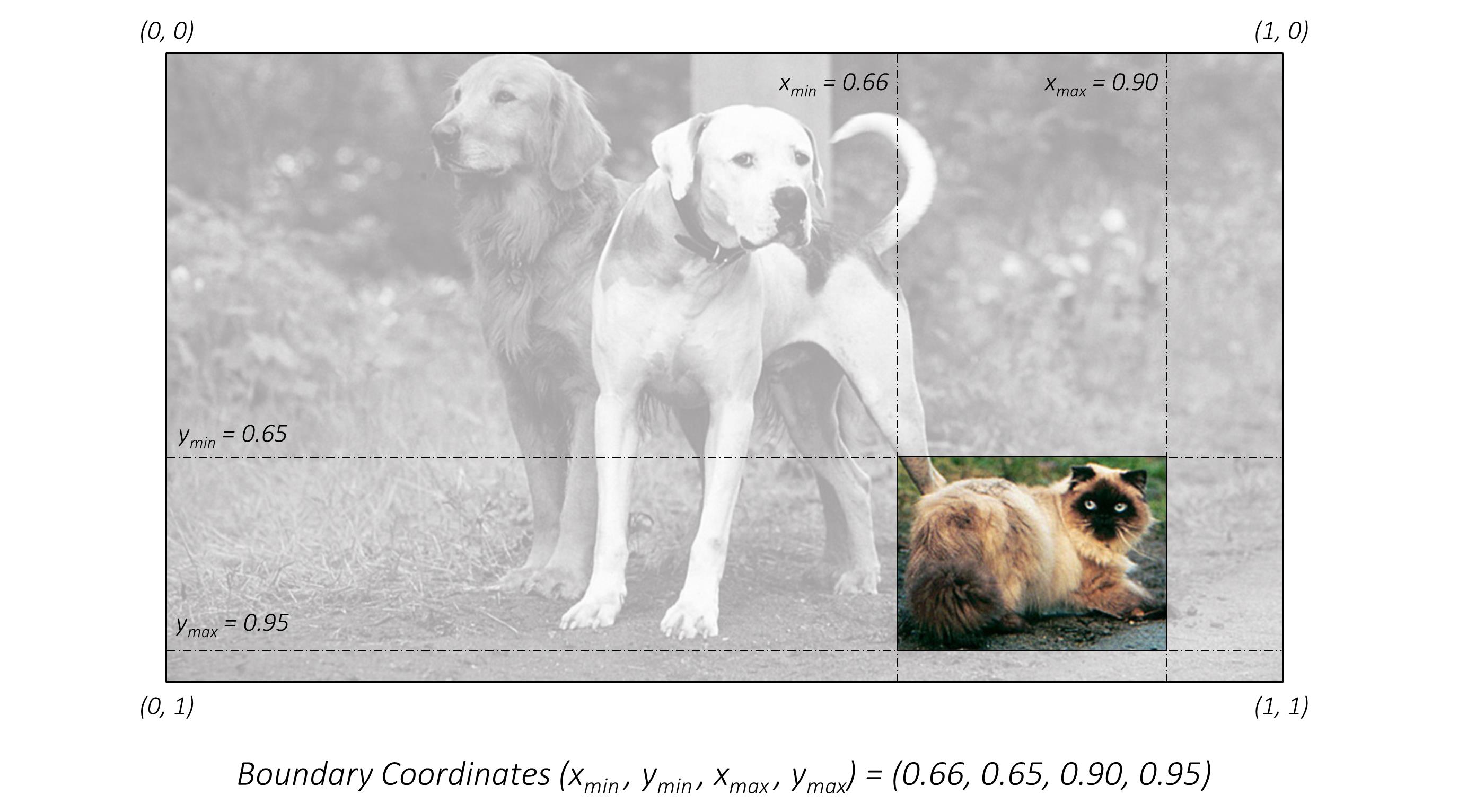
这样,如上图所示,坐标值将被缩放到
[
0
,
1
]
[0,1]
[0,1] 之间,即使我们不知道图片真实的大小,也可以知道框的位置。现在坐标是大小不变的,所有图片上的所有框都以相同比例测量。
Center-Size coordinates(中心坐标)
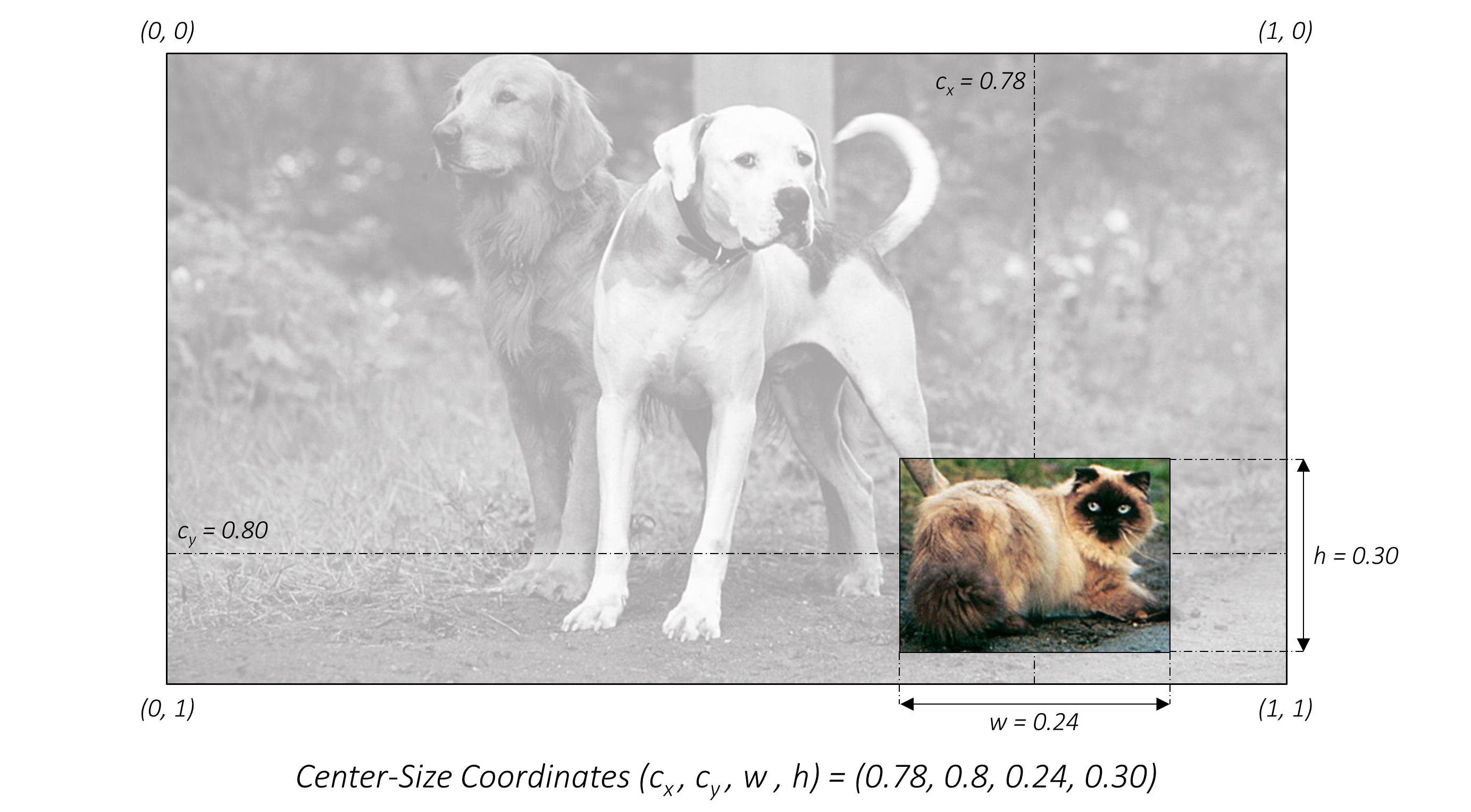
这是表示框的位置和尺寸的一种更明确的方法。
一个框的中心坐标形式为
(
c
x
,
c
y
,
w
,
h
)
(c_x, c_y, w, h)
(cx,cy,w,h),其中各个字母的含义在上图中可以非常明显的看出,这里就不再进行赘述,需要注意的是这里的所有坐标都进行了上述的缩放。
在这个代码中,你会发现我们通常使用两种坐标系统,这取决于它们对任务的适用性,并且总是以比例分数形式出现的(即进行了缩放)。
两种坐标系统的转换
- 边界坐标转中心坐标
从上面的介绍中,我们可以非常清楚的得出:
c x = x m i n + x m a x 2 , c y = y m i n + y m a x 2 c_x = \\frac{x_{min} + x_{max}}{2} ,\\quad c_y = \\frac{y_{min} + y_{max}}{2} cx=2xmin+xmax,cy=2ymin+ymax
w = x m a x − x m i n , h = y m a x − y m i n w = x_{max} - x_{min} , \\quad h = y_{max} - y_{min} w=xmax−xmin,h=ymax−ymin
def xy_to_cxcy(xy):
"""
边界坐标转中心坐标
:param xy: 一个shape为 [n,4]的tensor,表示n个边界坐标
:return: 一个shape为 [n,4]的tensor,表示转换后的n个中心坐标
"""
return torch.cat([
(xy[:, 2:] + xy[:, :2]) / 2, # cx, cy
xy[:, 2:] - xy[:, :2] # w, h
], dim=1)
- 中心坐标转边界坐标
同样,可以非常明显地看出如下关系:
x m i n = c x − w 2 , y m i n = c y − h 2 x_{min} = c_x - \\frac{w}{2}, \\quad y_{min} = c_y - \\frac{h}{2} xmin=cx−2w,ymin=cy−2h
x m a x = c x + w 2 , y m a x = c y + h 2 x_{max} = c_x + \\frac{w}{2} , \\quad y_{max} = c_y + \\frac{h}{2} xmax=cx+2w,ymax=cy+2h
def cxcy_to_xy(cxcy):
"""
中心坐标转边界坐标
:param cxcy: 一个shape为 [n,4]的tensor,表示n个中心坐标
:return: 一个shape为 [n,4]的tensor,表示转换后的n个边界坐标
"""
return torch.cat([
cxcy[:, :2] - (cxcy[:, 2:] / 2), # x_min, y_min
cxcy[:, :2] + (cxcy[:, 2:] / 2) # x_max, y_max
], dim=1)
Jaccard Index(IoU,重叠程度)
Jaccard Index(Jaccard 系数) 或称作 Jaccard Overlap(Jaccard重叠) 或称作 Intersection-over-Union(IoU,交并比),测量了两个框的重叠程度,这个指标可以反映预测框与真实框的接近程度,在计算loss和进行NMS(非极大抑制)时会用到。如下图所示。
以上是关于Pytorch—万字入门SSD物体检测的主要内容,如果未能解决你的问题,请参考以下文章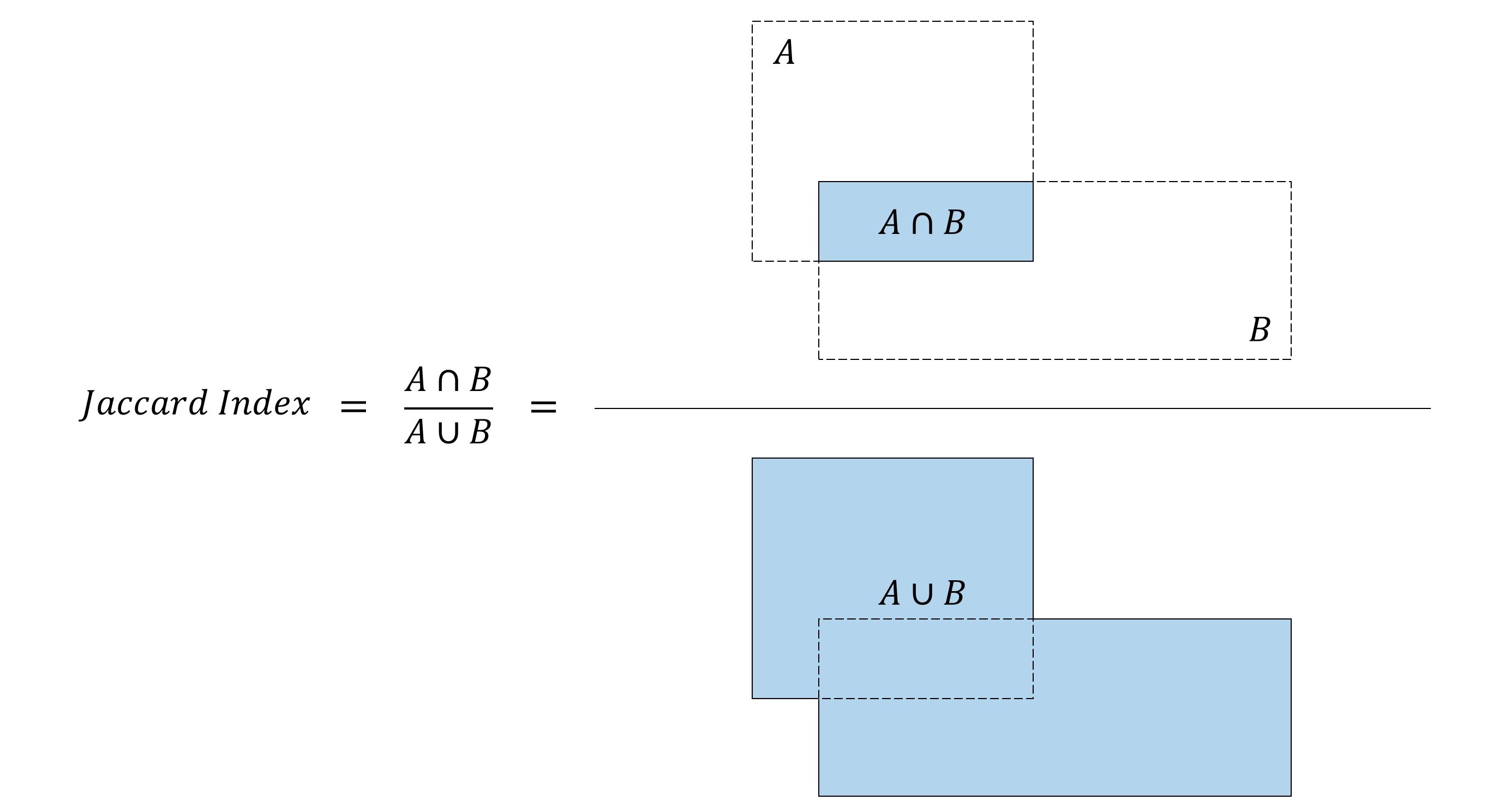
显然,Jaccard系数的取值在
[
0
,
1
]
[0, 1]
[0,1] 之间,取值为0时,说明两个框的交集为0,也就是两个框没有重叠;取值为1时,说明两个框的交集与并集相同,也就是两个框完全重叠。
Jaccard系数的代码实现可能不能很好的理解,我们需要求两个量,一个是交集面积,一个是并集面积,而且
并
集
面
积
=
框
A
的
面
积
+
框
B
的
面
积
−
交
集
面
积
并集面积=框A的面积+框B的面积-交集面积
并集面积=框A的面积+框B的面积−交集面积 ,框A和框B的面积都非常容易计算,因此我们将目光放在交集面积的计算上。考虑一些常见的交集方式,如下图,绿色点表示交集区域左上角,蓝色点表示交集区域右下角。
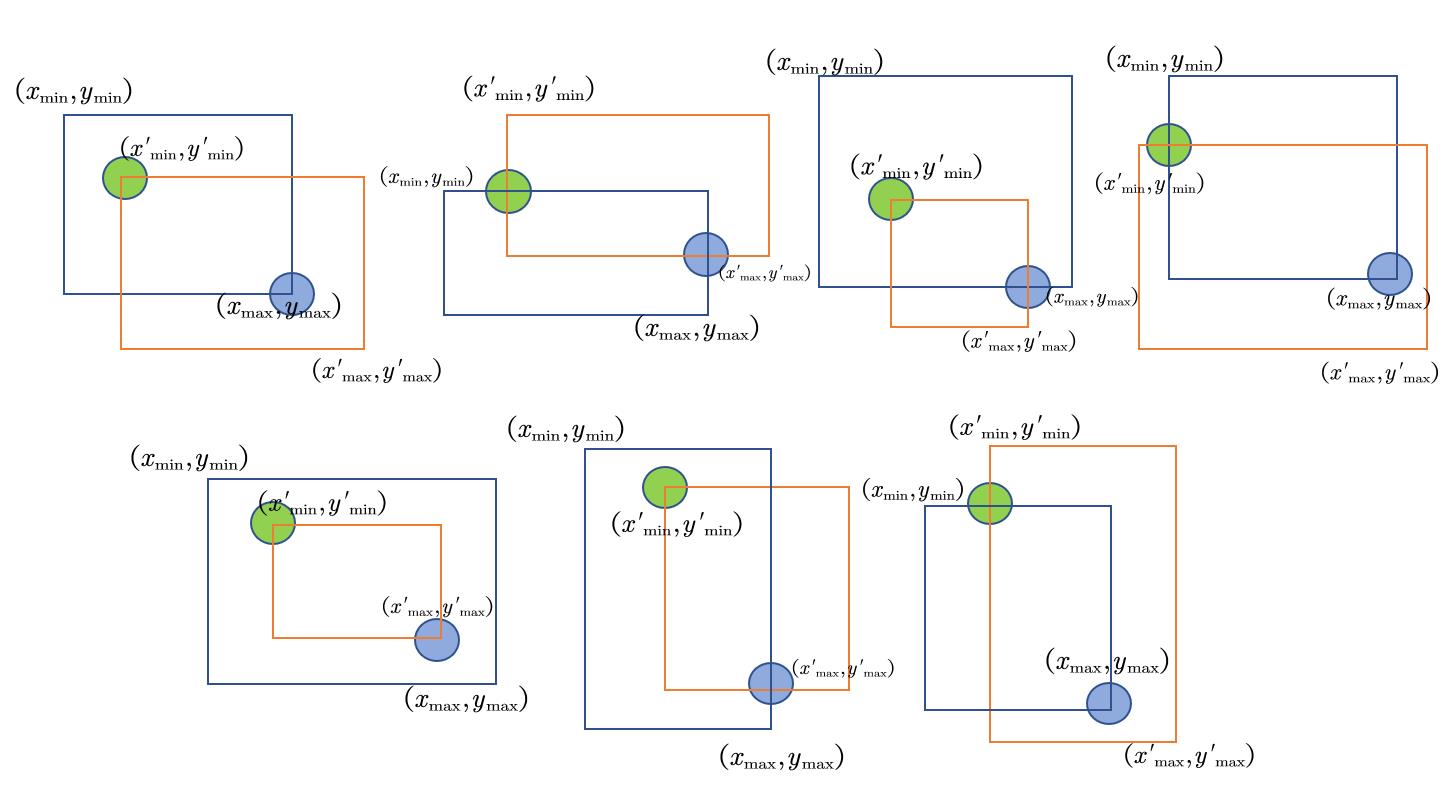
从上图中,我们可以看出,交集的区域都可以用两个点表示,这正是交集区域的边界坐标,整个交集区域的边界坐标可以表示为:
(
I
x
min
,
I
y
min
,
I
x
max
,
I
y
max
)
(I_{x_{\\min}}, I_{y_{\\min}}, I_{x_{\\max}}, I_{y_{\\max}})
(Ixmin,Iymin,Ixmax,Iymax)
其
中
:
I
x
min
=
max
{
x
min