第十五届全国大学生智能汽车竞赛 讯飞智慧餐厅 全国总决赛竞赛规则
Posted 卓晴
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了第十五届全国大学生智能汽车竞赛 讯飞智慧餐厅 全国总决赛竞赛规则相关的知识,希望对你有一定的参考价值。
第十五届全国大学生智能汽车竞赛

§01 参赛要求及须知
一、参赛要求
1、讯飞创意组比赛作为智能车竞赛的创意比赛面向全国全日制在校研究生、本科生和专科生。
2、每个学校最多允许一支队伍参加总决赛,晋级决赛的队伍名单以赛事组委会公布为准。
3、参加总决赛的队伍需从新提交报名表,每支队伍指导老师1-2名,参赛队员3-5名,指导老师不允许进行修改,参赛队员名单可进行修改,但需要从有本组别参赛记录的本校其他队伍的参赛队员中进行选取。
4、受疫情影响,竞赛形式为线上参赛,接受邮寄车模或封装镜像两种方式提交参赛作品。
5、参赛选手报名须保证所提供的个人信息真实、准确、有效,否则取消选手参赛资格。
6、其余未尽事宜,以组委会通知为准,组委会享有最终解释权
二、总决赛参赛相关细则
1、关于资料提交
本次比赛,各支队伍需提交镜像文件(需一同提交md5校验文件)、源代码包、技术报告、以及设备操作手册,需在8月16日中午12:00前上传至各自队伍的文档云,或以邮件的形式发送下载链接至报名邮箱iflyrobot@iflytek.com 。
注:
1)设备操作手册需注明镜像文件版本、源代码包版本,在截至时间之后更新的操作手册,需至少提前1小时在队长群中进行告知。
2)截至时间后,除文件损坏外,原则上不允许更新镜像文件。
3)若提交的镜像无法成功烧录部署,允许队伍二次提交代码,并延后一天参赛。若仍无法完成烧录部署,则提供一台烧录开发者镜像的设备,基于参赛队伍提供的代码包、操作手册进行部署。
2、关于赛事执行与入场
每个参赛队伍与工程师以线上会议的形式进行沟通,每支参赛队伍需提前10分钟进入线上会议,等待工程师进入进行沟通。
在比赛时工程师可根据选手进行参数修改、代码包调教等,但关键步骤需在操作手册中体现,或在代码中有明确的注释信息。
注:
1)若因视频会议清晰度不足,且在手册中无关键步骤导致的参数无法修改,承办方不承担相应责任。
2)若需要拷贝新的代码包至小车,限定200mb以下,且在本队开赛前1小时告知。
3、奖项设置
参照全国大学生智能汽车竞赛组委会的奖项设置要求,根据参赛队伍数量,根据比例设置一、二、三等奖。具体获奖名单以组委会公布为准。
注:
1)对于受疫情或其他特情影响无法继续参加总决赛的队伍直接确定为国赛三等奖。
2)若参加总决赛但未完赛的队伍,不设置国赛三等奖
4、申诉与仲裁
本次在竞赛过程中若出现有失公正或有关人员违规等现象,各赛队指导老师可在本组竞赛结束后2小时内向监督仲裁组提出申诉,申诉形式为填写申诉文件,发送至 iflyrobot@iflytek.com 并抄送至 mlsun3@iflytek.com 。监督仲裁组将在每日赛事结束后反馈仲裁结果,仲裁结果为最终结果。
5、联络方式
(1)监督仲裁组
- 联络人:孙明垒
- 电话号:15136487090
- 邮箱:mlsun3@iflytek.com
(2)邮寄车模
- 联络人:钱雨馨
- 电话号:18205652192
- 地址:安徽省合肥市高新技术产业开发区高新区望江西路666号科大讯飞
注:
1)若采取邮寄车模的方式进行参赛,必须在8月16日前寄出车模(以物流信息为准)。
2)邮寄时须使用物流箱包裹小车彩盒,且在物流箱、小车车身明显出用贴纸标明学校名称+队伍名称。
§02 比赛规则
一、赛项简介
本赛项以智能机器人作为人工智能技术的一个综合性实践载体,软件结合硬件,理论结合实践,从操作系统基础到应用实践再到算法实践与研究,深入浅出,把人工智能概念的学习融入到打造一个智能机器人的项目过程中,让学习的梯度更平缓,让实践的项目更接近产业更贴近生活。
本赛项模拟餐厅场景下,智能机器人由启动区出发,完成领取菜品、实现菜品送达的全流程模拟。
二、比赛要求
1、比赛软件环境
本次比赛基于嵌入式计算平台,参赛选手需预装Ubuntu18.04系统,预装软件包括但不限于TensorFlow、TensorRT、ROS。
2、比赛用车模
本次竞赛允许使用,讯飞U-CAR晓版本 / 讯飞U-CAR晓mini版本。两版本车模均禁止进行增加、去除、修改控制器、执行器、传感器、电池等。
- 产品外观:
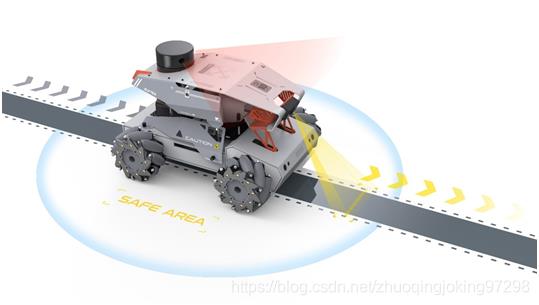
▲ 图2.2.2 比赛车模产品外观

▲ 图2.2.2.1 比赛用车模实际外观
- 产品规格:
比赛用车组成部分包括:车体平台(车体、上位机Jetson Nano处理器、麦克风阵列、IMU惯导模块、单目摄像头、激光雷达、下位机STM32F4控制器、电机、麦克纳姆轮)1套、电源1个。
| 传感器名称 | 传感器规格 |
|---|---|
| AI传感器1: 环形6MIC阵列 | 6个麦克风、360°声源定位、5米收音范围、USB通信、 支持自定义唤醒词(无限次数)、板载声源定位及回声消除算法、 支持实现全双工语音交互。 |
| AI传感器2: AHRS姿态检测模块 | 精度roll:0.02°,pitch:0.02°,YAW:0.05° 检测范围:Roll:±180°,Pitch:±90°,YAW:±180° 通信接口:板载UART |
| AI传感器3: RGB相机 | 工作原理:单目超广角 彩色图像分辨率:19201080@30FPS、1280720@30FPS、640*480@30FPS 视场角:水平FOV124.8°、垂直FOV67°、对角FOV160° 焦距:2.8mm F/NO(Infinite):2.6±5% 物距:45cm-100m |
| AI传感器4: 激光雷达 | 工作原理:三角测距 测距频率:4000-9000Hz 扫描距离:0.1m-16m(扫描频率4000Hz) 0.28m-16m(扫描频率9000Hz) 相对误差:2% 扫描角度:0-360° 角度分辨率:0.28° |
3、比赛场地
场地总尺寸约为4m4m(长宽)由单片约30cm50cm(高长)的PP塑料挡板构成。
分为机器人启动区、任务领取区、可移动障碍区、任务交付区。
- 机器人启动区(A区):机器在此放置后启动
- 任务领取区(B区):在B区右侧的挡板上随机张贴代表任务的二维码。
- 可移动障碍区(C区):此区域内会随机设置人物模型(高度高于车模激光雷达)
- 任务交付区(D区):根据在B区领取的任务停泊在代表不同任务的D1\\D2\\D3区域。
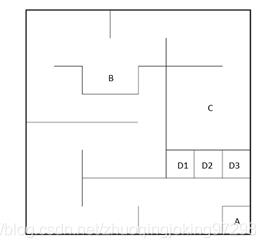
▲ 图2.3.1 比赛场地示意图
注:板材间的链接方式为上下各一个直径70mm的圆柱形连接件,在进行竞赛时注意避开.
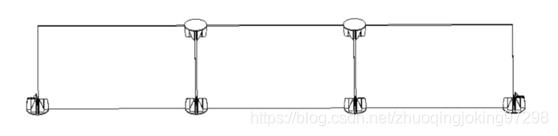
▲ 图2.3.2 板材链接示意图
注:B区域二维码在如图所示的位置放置。

▲ 图2.3.3 B区的二维码
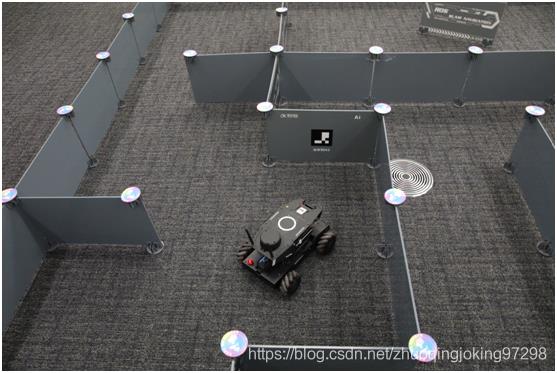
▲ 图2.3.4 比赛场地照片
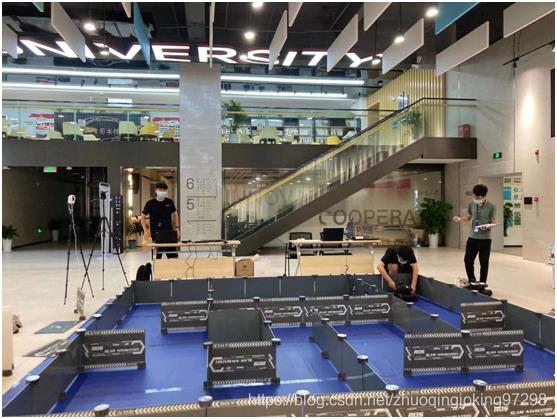
▲ 图2.3.5 比赛环境照片
注:比赛场地,地面铺设与竞速组别一样的蓝色PVC垫,厚度0.25mm。
4、障碍物
比赛中会设置2个障碍物,每次挑战,车模运行时要避开障碍物,否则会有相应处罚,障碍物位置会在如下所示的区中随机摆放的,但是保证最小可通过距离不小于50cm。
关于障碍物:
- 尺寸:30cm*50cm,与场地边框使用同一材质;
- 放置方法:50cm边贴地放置
- 放置规则:障碍物的出现区域按如下图所示,障碍物出现的组合会在队长会进行抽取。共抽取3种组合,每支赛队参赛时均为抽取的三种组合,且不会出现道路最小距离小于50cm的情况。
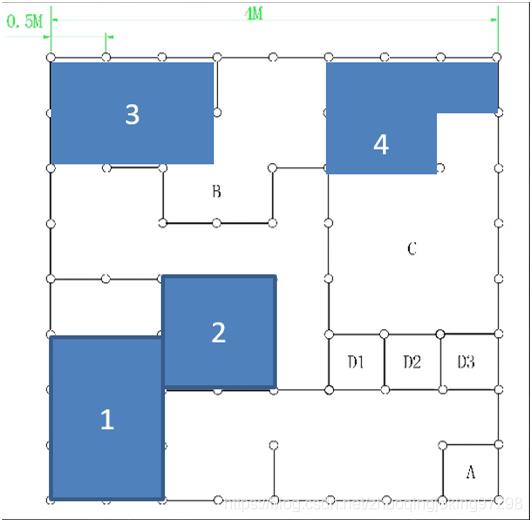
▲ 图2.3.6 障碍物出现位置示意图

▲ 图2.3.7 障碍物示意图
5、人物模型
比赛中人物模型的制作标准为:在宽30cm长50cm厚度5mm的KT板上印制,纯色背景的全身人物照片。
本次比赛人物模型样例可在竞赛全程文档云中进行下载,比赛现场使用的图集与提供的图集数据会保持一致。
关于人物模型:
- 尺寸:30cm*50cm,KT材质;
- 放置方法:30cm边贴地放置
- 放置规则:在三次挑战中会随机出现在如图所示的个区域中,且不会出现道路最小距离小于50cm的情况。
- 数量:人物模型挡板数量为3个,其中人物图像数量为0-2个,在比赛前进行抽取。
注:人物模型的出现区域如下图所示,人物模型出现位置的组合会在队长会进行抽取。共抽取3种组合,每支赛队参赛时均为抽取的三种组合。
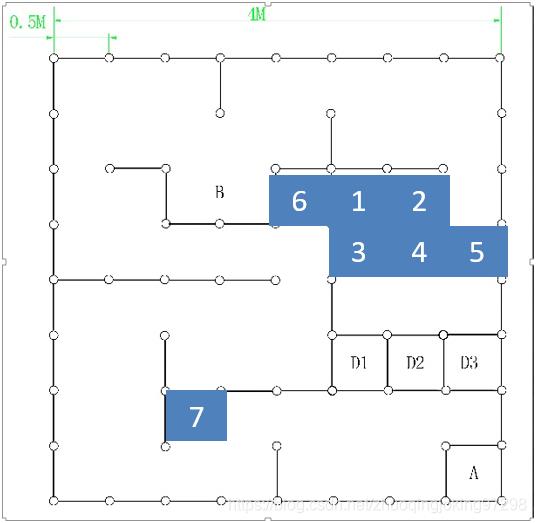
▲ 图2.4.1 人物模型出现区域示意图

▲ 图2.4.2 任务模型拜访示意图
6、二维码
本次比赛中,在任务领取区(B区)、任务交付区(D区),会出现二维码,在B区、D区两处出现的二维码无映射关系。
在B区域二维码M1/M2/M3分别对应蔬菜/水果/肉类三类菜品。
在D区二维码M1/M2/M3分对应 D1/D2/D3三个停车区域。


二维码挡板整体尺寸为30cm*50cm,挡板与二维码的标准图片可在竞赛全程文档云中进行下载。
三、比赛任务
前置任务:每个队伍上场比赛时,在组委会的监督下抽取任务题目(餐品种类及配送地点)、人物模型数量并进行平台部署和设备调试,限时10分钟。
注:10分钟准备时间,包含前一只赛队退场时间,以及本队伍的比赛准备。
赛题任务:围绕比赛主题——餐厅配送,进行多段子任务。限时20分钟,每支队伍最多三次挑战机会。
A. 子任务1:小车经语音启动;
B. 子任务2:智能车从出发区离开,移动至任务领取区B区,B区模拟的是餐厅的配菜区,B区挡板上的二维码,包含菜品信息,种类按抽签结果放置;
C. 子任务3:小车识别任务领取区张贴的二维码,获取所配送的菜品信息;并以语音播报的形式进行输出。
D. 子任务4:小车离开任务领取区,移动至可移动障碍区;
E. 子任务5:小车通过可移动障碍区(C区),停泊在任务要求的区域;
F. 子任务6:智能车语音播报“您的菜品已送达,请您取餐”后总任务结束。
其他规则:
A. 关于语音控制:在任务中可语音协助小车脱困或控制小车移动,但是不可经由控制命令将比赛任务传达给小车,在停泊区禁止使用,每场不得超过3次;
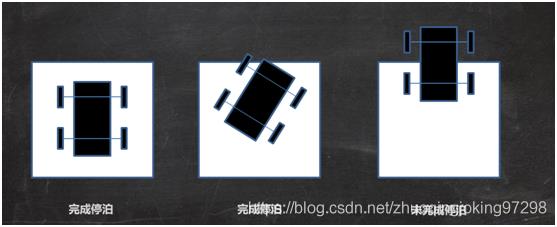
B. 关于停泊:2个轮子在停泊区域内视为未完成停泊本次竞赛成绩不计入排名,3个轮子在停泊区域内视为未完全完成停泊罚时10s,4个轮子均在停泊区域内视为完成停泊。
C. 关于障碍物和人物模型:障碍物数量为2个,人物模型挡板数量为3个,执行前置任务时进行人物数量抽取,每场人物数量为0-2个。
本次比赛对人物模型的分析包含两个主要特征,一个是戴眼镜,一个是长头发(过肩)。
智能车泊车后语音播报:戴眼镜的人物数量以及长头发的人物数量,识别准确的队伍会获得时间奖励。需要正确识别两个特征才可获得时间奖励。
D. 作品提交:参赛队伍需提交参赛代码包、镜像文件、技术报告模板至组委会。提交链接在开赛前以邮件的形式发送至参赛队伍报名所使用的邮箱。
E. 其他补充说明
(1)停车后需要在10s内开始语音播报,语音播报需要清晰、连贯。播报用时不计入比赛总时长
(2)语音控制小车启动时,唤醒词及语音指令需每次挑战保持一致,若三次挑战语音不一致视为三次挑战语音启动均失败
(3)任务3需要小车在B区域完成,语音播报格式为“U-CAR 本次运输的菜品是蔬菜/肉类/水果”,播报时小车需要B区域内
注:u-car可替换为其他名称
(4)终点播报格式为:
(挑战附加题):本次送餐任务途中遇到X个人,其中长头发Y人,戴眼镜Z人。您的菜品已送达,请您取餐。
其中人数不计分,两个特征完全正确时可获得奖励“完成所有任务用时”*60%。
(不挑战附加题):您的菜品已送达,请您取餐。
注:X/Y/Z表示数量。
“您的菜品已送达,请您取餐”为任务完成标志播报后任务结束。若未能播报视为比赛未完成。
四、补充说明
1、关于发车流程:
a) 选手指挥工程师连接屏幕进行或远程进行准备;
b) 选手准备好后通知工程师,并告知裁判是否挑战语音启动;
c) 裁判在镜头下解封在准备时间内抽取的信封;
d) 裁判向工程师示意可以进行发车;
e) 若挑战语音启动,则需要在30秒内唤醒小车进行任务挑战,比赛计时以小车开始移动开始。30秒内未唤醒成功则视为语音启动失败,可由选手在30秒内手动启动,比赛计时以小车移动开始。
f) 若不挑战语音启动,则需在60秒内完成发车,比赛计时以小车移动开始。
2、关于发车位置
发车需要小车4个轮子均在A区域内,但方向不限制。

3、关于任务领取区
任务2完成的判断标志为小车至少2个轮子完全驶入。

4、关于播报:
菜品播报需明确说出本次运送的菜品,如:“U-CAR本次运输的菜品是蔬菜。”播报须在离开B区域前完成。
5、关于停泊:
停泊完成的依据为至少三个轮子进入停泊区,若少于3个轮子则视为子任务5失败。
6、关于计时:
本次竞赛采用秒表计时,以小车开始移动开始,以小车停止运动结束。语音唤醒小车、语音播报等环节不记入比赛时长。
注:以小车2个轮子进入停车区域后开始计算
- 若小车到达停车区3秒内出现持续震荡运行,以最后停车位置作为评分依据。
- 若小车到达停车区3秒后出现持续震荡运行,以第一次停车位置作为评分依据。
- 若在10s内若没有完成播报,则判为子任务六以及附加任务挑战失败
五、比赛计分规则说明
| 罚分原因 | 罚分 |
|---|---|
| 语音启动 | 语音启动失败罚时10秒 |
| 碰撞围栏 | 比赛用时加5秒 次 |
| 碰撞障碍物 板 | 比赛用时加5秒 次 |
| 未正确停泊 | 未完成不计录本次成绩,未完全完成加10秒。 |
| 识别人物 | 特征识别成功并在泊车区以语音播报的形式正确说出特征。 奖励:(完成所有任务用时)*60%。 注:两个特征需全部正确。 |
| 比赛用时(分) | 完成所有任务用时(秒)识别人物(60%)+语音启动识别罚时(10秒)+碰撞围栏次数5(秒)+碰撞静态障碍物*5(秒)+停泊罚时(10秒) |
| 完成比赛但子任务未全部完成 | 优先按照子任务完成数量进行排名,子任务完成数量一样的队伍依据时间进行排名。 |
| 未完成比赛队伍 | 依据子任务完成数进行排名 |
| 未完成比赛且子任务完成数相同的队伍 | 依据任务执行过程中碰撞次数倒序排名 |
六、比赛违规说明
比赛过程中出现违规或异常情况按照以下方式处理:
(1)裁判发令后,机器人在 60秒内没有启动,比赛得分记为 0 分。
(2)机器人冲出场地、机器人失控则比赛结束,当前得分作为最终得分。
(3)机器人完成赛题任务过程中,停止运行超过60秒,比赛立即结束,当前成绩记为比赛最终成绩。
(4)机器人触碰围栏或障碍物连续超过30秒,比赛结束,以当前成绩记为比赛最终成绩。
其他未尽事宜,组委会有最终解释权。
以上是关于第十五届全国大学生智能汽车竞赛 讯飞智慧餐厅 全国总决赛竞赛规则的主要内容,如果未能解决你的问题,请参考以下文章