linux CAN驱动实验
Posted 九章_
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了linux CAN驱动实验相关的知识,希望对你有一定的参考价值。
CAN简介
CAN 全称(Controller Area Network)控制局域网络。最早是由德国BOSCH(博世)开发,是当前应用最广泛的现场总线之一。应用领域汽车电子、工业自动化、医疗、工业和船舶等。
CAN特点:
1)多主控制
在总线空闲时,所有单元都可以发送消息。多个节点发送消息时,根据节点ID决定优先级。
2)系统的柔软性
3)通信速度快
最高1M(举例小于40M),最长10KM,速度低于5Kbps
4)具有错误检测、错误通知和错误恢复功能
5)连接节点多
CAN协议
协议提供5种帧格式来传输数据:数据帧、遥控帧、错误帧、过载帧和间隔帧。其中数据帧和遥控帧有标准格式和扩展格式。
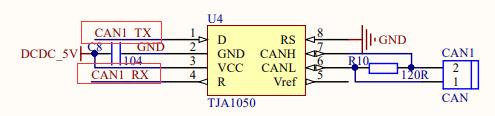
原理图:

修改设备树
imx6ull.dtsi文件中,compatible 属性就可以找到 I.MX6ULL 的 FlexCAN 驱动源文件。
flexcan1: can@02090000 {
compatible = "fsl,imx6ul-flexcan", "fsl,imx6q-flexcan";
reg = <0x02090000 0x4000>;
interrupts = <GIC_SPI 110 IRQ_TYPE_LEVEL_HIGH>;
clocks = <&clks IMX6UL_CLK_CAN1_IPG>,
<&clks IMX6UL_CLK_CAN1_SERIAL>;
clock-names = "ipg", "per";
stop-mode = <&gpr 0x10 1 0x10 17>;
status = "disabled";
};
打开imx6ull-alientek-emmc.dts,添加引脚配置信息
pinctrl_flexcan1: flexcan1grp{
fsl,pins = <
MX6UL_PAD_UART3_RTS_B__FLEXCAN1_RX 0x1b020
MX6UL_PAD_UART3_CTS_B__FLEXCAN1_TX 0x1b020
>;
};
追加节点信息,并将status设置为"OK"
&flexcan1 {
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_flexcan1>;
xceiver-supply = <®_can_3v3>;
status = "okay";
};
内核使能CAN总线
1)打开CAN总线子系统,
-> Networking support
<*> CAN bus subsystem support
2)使能Freescale系列的FlexCAN外设驱动
-> Networking support
-> CAN bus subsystem support
-> CAN Device Drivers
<*> Platform CAN drivers with Netlink support
<*> Support for Freescale FLEXCAN based chips
需要移植的工具
1)iproute2
2)can-utils
通信测试
1)回环测试
root@ATK-IMX6U:~# ifconfig can0 down
root@ATK-IMX6U:~# ip link set can0 type can bitrate 500000 loopback on
root@ATK-IMX6U:~# ifconfig can0 up
root@ATK-IMX6U:~# candump can0 &
[1] 900
root@ATK-IMX6U:~# cansend can0 5A1#11.22.33.44.55.66.77.88
can0 5A1 [8] 11 22 33 44 55 66 77 88
如果can0 开启先关闭
设置回环测试模式,并设置can0的速度为500Kbit/s,非回环测试去掉loopback on
打开can1
candump后台接受数据
cansend cano 发送数据
cansend命令发送can数据,51A是帧ID,#后面是发送的数据。can2.0一次最多发送8个字节,8个字节之间用 . 隔开。
测试成功,后台接收到自己发给自己的数据。
以上是关于linux CAN驱动实验的主要内容,如果未能解决你的问题,请参考以下文章