广州市车联网先导区建设总体技术规范
Posted 爱是与世界平行
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了广州市车联网先导区建设总体技术规范相关的知识,希望对你有一定的参考价值。
广州市车联网先导区建设总体技术规范
广州市车联网先导区建设总体技术规范
2021年3月
1 范围
本文件主要规定了广州市车联网先导区的整体目标、技术架构、建设内容及其技术要求等。
本文件共分7章,分别为总则、规范性引用文件、术语及定义、缩略语、总体要求、基础设施建设技术要求、应用场景建设技术要求等。
本文件适用于广州市车联网先导区建设,其它地区可参照执行。
3 术语和定义
下列术语和定义适用于本文件。
3.1 区域子系统 regional subsystem*
区域子系统是特定区域的路侧协同设施的数据汇聚点,提供交通预测、交通监管、安全预警、以及域内车辆管理等服务。
3.2 中心子系统 central subsystem
中心子系统为先导区统一数据平台,汇聚各类系统的数据,提供融合、开放、共享的智能网联基础数据服务。
3.3 边缘云 edge cloud
边缘云是靠近道路侧,提供实时数据处理、分析决策的小规模云数据中心。
3.4 区域云 regional cloud
区域云是为特定区域提供弱实时计算与离线计算的云数据中心。
3.5 路侧协同设施 roadside collaborative facilities
由路侧通信设备、感知设备、计算设备、辅助设施等组成。
4 缩略语
下列缩略语适用于本文件。
4G:第四代移动通信技术(the 4th Generation Mobile Communication Technology)
5G:第五代移动通信技术(the 5th Generation Mobile Communication Technology)
AVP:自主代客泊车(Automated Valet Parking)
API:应用程序接口(Application Programming Interface)
BDT:北斗卫星导航系统时间(BeiDou Navigation Satellite System Time)
CA:证书颁发机构(Certificate Authority)
CPU:中央处理器(Central Processing Unit)
C-V2X:蜂窝-V2X(Cellular Vehicle to Everything)
DTLS:数据包传输层安全性协议(Datagram Transport Layer Security)
GNSS:全球导航卫星系统(Global Navigation Satellite System)
HDMI :高清多媒体接口( High Definition Multimedia Interface)
HMAC : 哈 希 运 算 消 息 认 证 码 ( Hash-based Message Authentication Code)
HTTP:超文本传输协议(Hyper Text Transmission Protocol)
IPSEC:互联网安全协议(Internet Protocol Security)
LRR:长距毫米波雷达(Long Range Radar)
LTE:通用移动通信技术的长期演进(Long Term Evolution)
MTBF:平均故障间隔时间(Mean Time Between Failure)
NR:新空口(New Radio)
OBU:车载单元(On-Board Unit)
OTA:空中下载技术(Over the Air)
RSU:路侧单元(Road Side Unit)
SL-SCH:直通链路共享信道(Sidelink Share Channel)
SNMP :简 单网络管 理协议( Simple Network Management Protocol)
SRR:短距毫米波雷达(Short Range Radar)
SSL:安全套接字协议(Secure Sockets Layer)
TCP/IP:传输控制/网络通信协议(Transmission Control Protocol/Internet Protocol)
TLS:传输层安全性协议(Transport Layer Security)
TTI:传输时间间隔(Transmission Time Interval)
UDP:用户数据报协议(User Datagram Protocol)
USB:通用串行总线(Universal Serial Bus)
V2I:车与路通信(Vehicle to Infrastructure)
V2N:车与网络通信(Vehicle to Network)
V2P:车与人通信(Vehicle to Pedestrian)
V2V:车与车通信(Vehicle to Vehicle)
V2X:车联网,车与其它设备通信(Vehicle to Everything)
5 总体要求
5.1 建设内容
车联网先导区建设内容应包含基础设施建设、应用场景建设两大类。
5.1.1 基础建设内容
车联网基础设施建设应包括云端、路端设施及车载终端,如图 1所示。
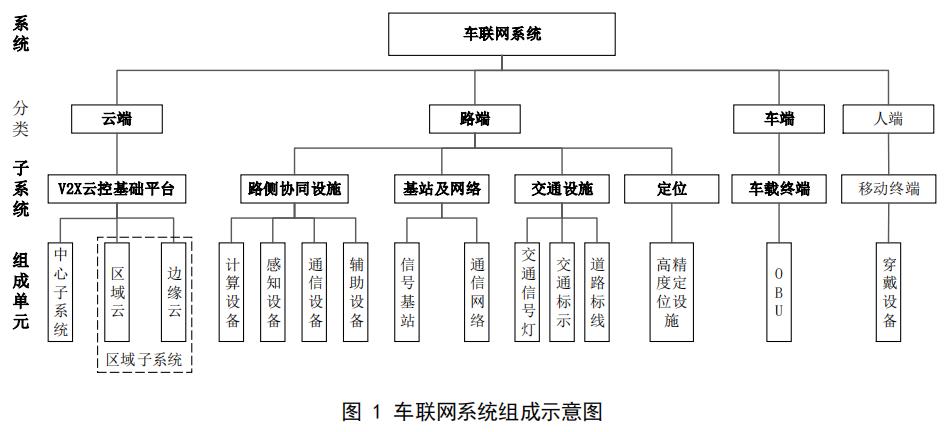
先导区从构成层级可分为系统、子系统、单元三个层级,子系统根据设备的类型及部署位置可划归为云端、路段、车端、人端等。
先导区具体建设内容应包括但不限于:
a)V2X云控基础平台:主要包括中心子系统和区域子系统(包括区域云或边缘云)等。其中,边缘云和计算设备(归属路侧协同设施)为实现边缘计算的两种形态,建设方案中应至少存在一种;
b)路侧协同设施:主要包括通信设备(如RSU等)、感知设备(如摄像头、毫米波雷达、激光雷达等)、计算设备(用于本地计算) 及辅助设备等。辅助设备包括杆体支架、交换机、供电管线、通信管线等;
c)基站及网络:主要包括4G/5G等信号基站、通信网络等;
d)交通设施:主要包括交通信号灯、交通标示、道路标线等;
e)定位:主要包括高精度定位设施等;
f)车载终端:通信终端(如OBU)等;
g)人端设备:如移动终端或穿戴设备等,本文件暂不做要求,但鼓励各示范区探索,待人端设备技术路线基本明确后,再修订补充。
5.1.2 应用场景建设
车联网先导区应能支撑智能网联汽车测试、示范应用,如图 2 所示。
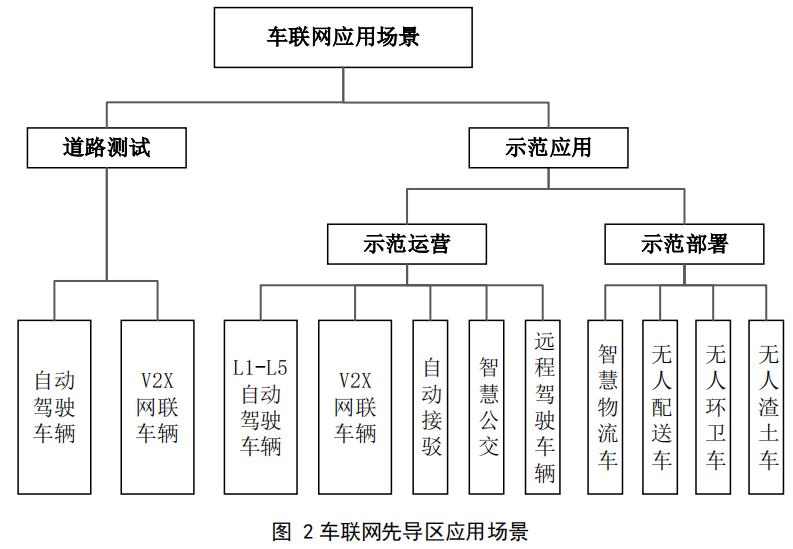
a)智能网联汽车道路测试场景:应支持自动驾驶功能测试和V2X功能测试,详见7.1条;
b)智能网联汽车示范应用场景,包含示范运营和示范部署两大类。示范运营面向公众出行场景:应支持但不限于L1-L5各级别自动驾驶车辆、V2X网联车辆示范应用以及自动接驳、智慧公交、远程驾驶车辆等特定应用场景,详见7.2.1条;示范部署面向公共服务场景:应支持但不限于智慧物流、无人配送车、无人环卫车、智能渣土车等,详见7.2.2条。
5.2 系统建设技术要求
5.2.1 一般要求
车联网应能提升车辆智能化水平和自动驾驶能力,提高交通效率,改善车辆驾乘感受,为用户提供智能、舒适、安全、节能、高效的综合服务。
车联网系统建设方案、施工方案等设计过程中,应统筹考虑各组成部分,协同设计、协同建设,避免资源浪费,应符合JTG D80《公路交通工程及沿线设施设计通用规范》相关规定。
车联网基础设施建设宜尽可能考虑复用原有基础设施,节约资源。
车联网系统应遵循安全可靠、节能高效、技术先进、经济合理的原则,应选用可靠性高、低成本、可维护性、数据准确度满足基本要求并可大面积应用的设施。
车联网系统覆盖范围内应至少支持V2V、V2I、V2N的数据通信服务。
车联网通信应支持车联网(智能网联汽车)直连通信5905-5925MHz频段(专用频段)并可升级未来的5G(NR)V2X车联网频段,并相关国家和行业标准:
YD/T 3400《基于 LTE 网络的车联网无线通信系统 总体技术要求》;
YD/T 3340《基于 LTE 的车联网无线通信技术 空中接口技术要求》;
YD/T 3707《基于 LTE 的车联网无线通信技术 网络层技术要求》;
YD/T 3709《基于 LTE 的车联网无线通信技术 消息层技术要求》;
T/CSAE 53《合作式智能运输系统 车用通信系统应用层及应用数据交互标准》。
车联网路侧设施建设应符合 YD/T 3592《基于 LTE 的车联网无线通信技术 基站设备技术要求》、JTG D80《公路交通工程及沿线设施设计通用规范》的规定。
车联网基础设施的物理环境安全、通信网络安全、区域边界安全、计算环境安全和安全管理应符合国标、行标有关要求。
车联网基础设施应满足耐高温、高湿环境,电子产品应满足电磁兼容要求。
5.2.2 系统架构要求
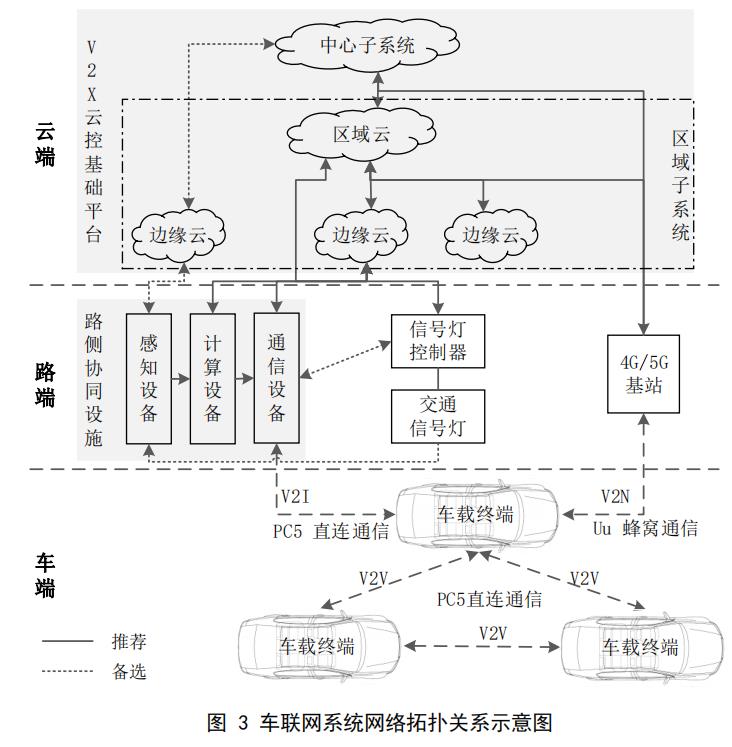
车联网网络拓扑关系如图 3 所示,各设施应通过无线或有线方式与其它设施连通,实现数据共享。
云端设施主要包含中心子系统和区域子系统(包含区域云或边缘云):
中心子系统应直接或间接连通云端、路端、车端等的网联设施;
区域云按需建设,应连通中心子系统和管理范围内的边缘云(或路侧计算单元);
边缘云按需建设,应通过直连或间接连接方式(通过区域云)与中心子系统连通,实现数据通信。
路端设施主要包含路侧协同设施、基站及网络、交通设施、定位等,各子系统应通过无线或有线方式与云端设施连通,实现数据通信。
在示范期内,交通信号灯控制器应尽快与 V2X 云控基础平台或通信设备进行直连连通,对暂不能修改的,应尽可能增加路侧感知设备以对交通信号灯信息进行采集。
车端的通信终端应通过直连通信或蜂窝通信方式与路端、云端实现通信。
5.2.3 系统通信要求
车联网系统通信可分为有线或无线通信方式:
云端设施、路端设施等安装后位置基本不变的设备宜采用有线通信方式;
车端等移动设施宜采用无线通信方式。
有线通信包含光纤、网线及其它通信方式:
光纤通信应用于长距离连接,如基站、计算设备、云平台间的相互连接,传输距离超过 100 米的通信宜采用光纤通信方式;
网线通信应用于短距离连接,如计算设备与 RSU、感知设备之间的相互连接;
其它通信方式如 USB、串行通信接口等,可用于短距离连接,如计算设备与电子设备之间的连接,数据格式满足相应的数据通信协议。
无线通信包含直连通信或蜂窝通信方式:
V2V、V2I、V2P 等应采用直连通信方式,通过 PC5 接口进行通信,工作于专用频段5905-5925 MHz,通信设备应符合YD/T3755《基于 LTE 的车联网无线通信技术 支持直连通信的路侧设备技术要求》7-10 节、车联网(智能网联汽车)直连通信无线电设备技术要求(详见附录 A)等要求;
V2N 等应采用蜂窝通信方式,通过 Uu 接口进行通信,工作于运营商蜂窝网络频段,需要 4G/5G 网络(基站)的支持,通信设备应符合 YD/T 2563《LTE FDD 数字蜂窝移动通信网 Uu接口物理层技术要求》、YD/T 2564《LTE FDD 数字蜂窝移动通信网 Uu 接口层二技术要求》、YD/T 2565《LTE FDD 数字蜂窝移动通信网 Uu 接口层三技术要求》或 YD/T 2560《TDLTE 数字蜂窝移动通信网 Uu 接口物理层技术要求》、YD/T2561《TD-LTE 数字蜂窝移动通信网 Uu 接口层二技术要求》、YD/T 2562《TD-LTE 数字蜂窝移动通信网 Uu 接口层三技术要求》等要求。
各通信设施之间的数据传输内容、数据协议、传输性能应符合T/CSAE 53《合作式智能运输系统 车用通信系统应用层及应用数据交互标准》、《广州市车联网先导区 V2X 云控基础平台技术要求》等标准要求。
车联网系统通信应符合 YD/T 3594《基于 LTE 的车联网通信安全技术要求》、YD/T 3751《网信息服务 数据安全技术要求》、YD/T 3752-2020 车联网信息服务平台安全防护技术要求》等相关规定。
车联网终端(OBU、RSU 等)应获得 V2X 国家平台 CA 安全认证。
5.2.4 系统可升级性要求
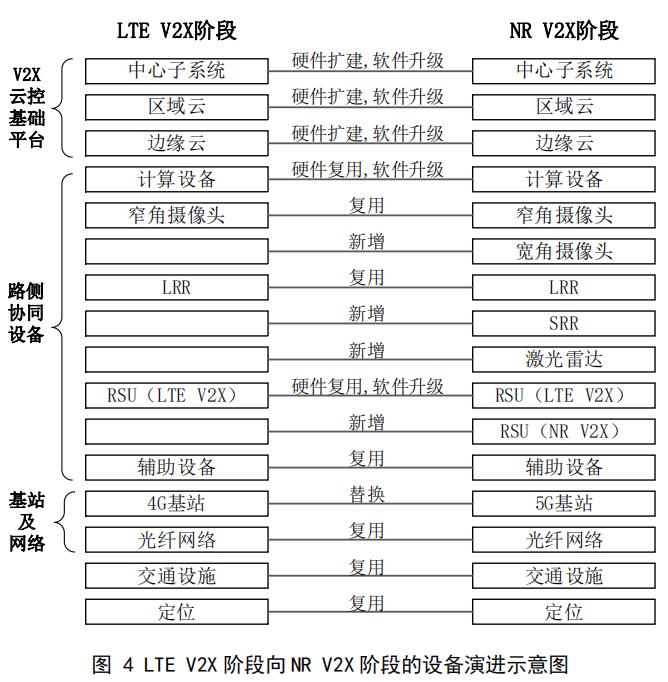
先导区以车路协同自动驾驶为建设目标,应分步建设,可分为LTE V2X(协同预警辅助)和 NR V2X(协同控制决策)两个阶段,如 表 1 所示:
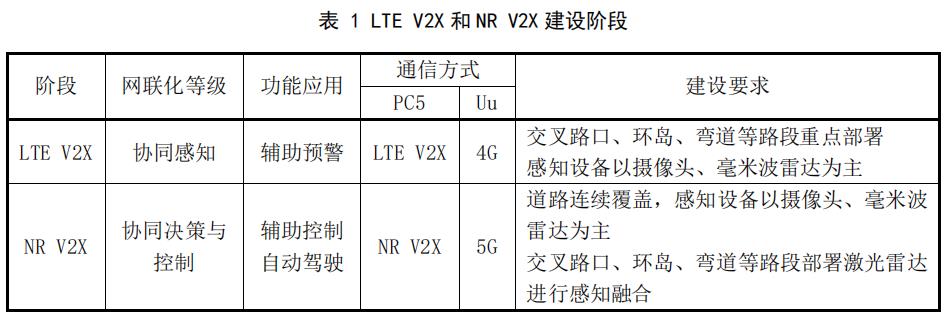
LTE V2X 阶段建设应具备可升级性,硬件应可复用至 NR V2X 阶段,软件应通过升级应用于 NR V2X 阶段,设备升级关系宜参考图 4:
中心子系统、区域云、边缘云宜复用 LTE V2X 阶段的硬件并按需进行扩建,提高计算能力、存储能力等,软件按需升级,满足更多功能应用,如协同决策、协同控制等;
计算设备宜选择软硬分离设计的产品,两个阶段硬件宜复用,软件宜具备 OTA 升级功能;
宽角摄像头、SRR、激光雷达等宜在NR V2X阶段大规模部署,LTE V2X 阶段也可按需部署;
窄角摄像头、LRR 等宜实现两个阶段的复用;
RSU 在 LTE V2X 阶段只存在 LTE 产品,在 NR V2X 阶段将存在 LTE 和 NR 两种产品,其中,LTE 产品宜实现硬件复用,软件具备 OTA 升级功能,以扩展更多的消息收发;
4G、5G 基站在两个阶段都会存在,5G 基站宜加快部署,逐步替代 4G 基站;
辅助设施、光纤网络、交通设施、定位等宜实现两个阶段的完全复用。
根据自动驾驶车辆功能安全设计要求,NR V2X 阶段的协同决策与控制对路侧设备也应有功能安全要求,设备选型时应考虑软硬件升级。
路侧功能安全尚处于探索阶段,现阶段暂不做要求,但鼓励各区探索,待路侧功能安全相对成熟后对其修订。
建设方案、施工方案设计时,应考虑系统可升级性要求,在设备选型、站点选择、管道部署等应考虑预埋,以满足 NR V2X 阶段建设要求。
各区可根据车联网建设起始时间,选择不同的建设阶段,宜在NR V2X 具备建设条件前优先建设 LTE V2X 阶段,然后再升级到 NR V2X 阶段。若 NR V2X 已具备建设条件,则可直接开展 NR V2X 建设。
6 基础设施建设技术要求
6.1 V2X 云控基础平台建设技术要求
6.1.1 一般要求
V2X 云控基础平台,面向数字化、网络化、智能化需求,集成车端、路侧、公共服务信息平台、第三方平台各种数据、服务、用户等各类资源,在此基础上提供车路协同应用数据集成分析、应用支撑能力和基础应用能力,以支撑各种自动驾驶、智能交通管理、智慧出行、公共安全等应用,是构建产业生态重要基础。
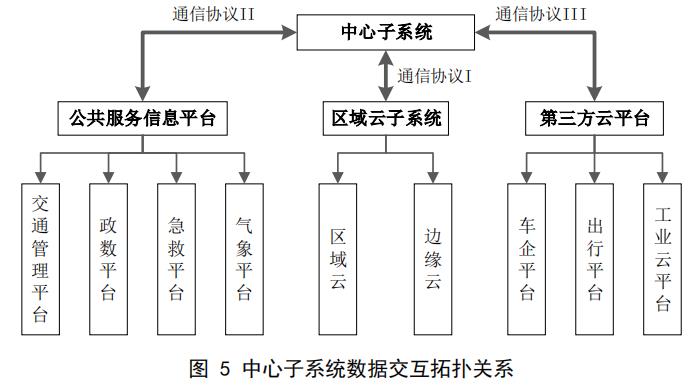
V2X 云控基础平台总体架构如图 5 所示,主要分为中心子系统和区域子系统:
中心子系统应能汇聚区域子系统、路侧协同设施及车端等通 信节点的所有信息,具备直接或间接对任一路侧终端进行数据获取及特殊情况下对任一路段进行控制与管理功能,应实现跨区域、跨路段的数据汇总分析、协调控制等;
中心子系统作为先导区统一数据平台,应与地图、交管、气象、急救等公共服务信息平台,车企、出行等第三方平台实 现数据通信;
区域云为各区按需自建的云控中心,负责汇聚本区范围内的车联网数据;
边缘云应根据路侧设备的建设规模合理设定,其数据可通过区域云汇聚到中心子系统,也可以直接与中心子系统连接通信。边缘云应实现边缘计算的功能,主要负责实时闭环车路运行优化相关业务。
根据对接主体的不同,V2X 云控基础平台的数据交互协议分为三类,如图 5 所示:
a)通信协议 I:面向区域子系统及路侧协同设施的数据交互协议;
b)通信协议 II:面向公共服务信息平台的数据交互协议;
c)通信协议 III:面向第三方平台的数据交互协议。
V2X 云控基础平台应采用自建或租用方式,实现行业内部业务系统数据整合及跨机构平台数据共享,提升通行效率、运行效率、管理效率、处置效率、公众获得感,降低事故发生率。
V2X 云控基础平台应实现车联网信息监测与信息服务的目标和功能,并注重与互联网、交通信息化平台以及社会资源的融合。
6.1.2 功能及性能要求
6.1.2.1 中心子系统
中心子系统对海量数据进行结构化整理、存储,并通过统一的注册、审核、发布、更新机制,将数据共享给产业链各方。
中心子系统应具备但不限于以下基础平台能力要求:开放接口服务、资源连接层、数据处理层、数据共享层、数据分析层等。
中心子系统应具备但不限于以下全域应用能力:车路协同应用服务、道路交通监测、智能网联车辆管理、产业服务、测试服务、高精度地图服务等。
中心子系统应通过平台自建或与高精度地图平台联合实现高精地图服务功能,为智能网联汽车提供精确的道路交通信息。
高精度地图应由静态数据图层和动态数据图层构成,高精度地图管理系统应支持 V2X 动态交通信息接入,动态地图切片下发功能。相关技术要求参见附录 B。
6.1.2.2 区域子系统
区域子系统组成可以有如下方式:
a)边缘云和区域云协同,数据按路侧协同设施—边缘云—区域云—中心子系统逐层向上/下传输;
b)只含边缘云,边缘云与中心子系统直连,数据按路侧协同设施—边缘云—中心子系统逐层向上/下传输;
c)只含区域云,路侧协同设施与区域云直连,数据按路侧协同设施—区域云—中心子系统逐层向上/下传输。
区域子系统应具备但不限于以下基础平台能力:资源连接层、数据处理层、数据分析层等。
区域子系统应具备但不限于以下应用平台能力:设备管理、事件管理、数据管理、拓扑管理、安全管理、高精度地图匹配及动态更新等。
V2X 云控基础平台应具备数据备份功能,并符合下列功能要求:
应实时自动将重要数据进行备份,可通过分布式安全存储系统对数据备份;
应采用定期异地全量自动备份策略,同时支持自定义备份策略,保证数据安全性和完整性。
V2X 云控基础平台应采用功能模块化设计,并能够进行服务化封装,以方便不同功能模块之间的相互调用。
V2X 云控基础平台应具有较强的弹性可扩展能力,以适应功能模块、数据资源、应用能力等的不断发展。
V2X 云控基础平台应对车联网覆盖道路的动态感知、出行服务和协同管控应基于即时、全量、全网的原则。
V2X 云控基础平台应建设应采用一套交换架构、一套安全机制、一套质量管控、一套处理模型、一套数据标准及一套指标体系。
V2X 云控基础平台网络安全应符合 GB/T 22239《信息安全技术信息系统安全等级保护基本要求》、YD/T 3594《基于 LTE 的车联网通信安全技术要求》等相关规定。
V2X 云控基础平台的整体设计建设等级应不低于 GB 50174《数据中心设计规范》中 B 级的等级要求。
6.1.3 数据交互要求
V2X 云控基础平台应具备信息接入和下发功能。
接入功能的数据类型应包含但不限于:路侧协同设施感知数据、设备状态数据、交通信号动态数据、定位系统数据、车端动态数据以及通过其它平台获取的高精度地图数据、气象环境监测数据、交通事件数据等;
下发功能的数据类型应包含但不限于:配置管理信息、动态交通信息、交通事件/标志信息、车辆事件预警信息、局部动态地图等。
中心子系统对区域子系统、路侧协同设施等的数据获取方式, 应包含但不限于以下两种方式:
a)根据预定通信协议定期自动上传所要求的的数据,该类数据主要指经过数据处理的结构化数据;
b)上级平台主动调用,按需主动调用部分路段、设备等的数据,可支持原始数据的调用。
6.2 路侧协同设施建设技术要求
6.2.1 一般要求
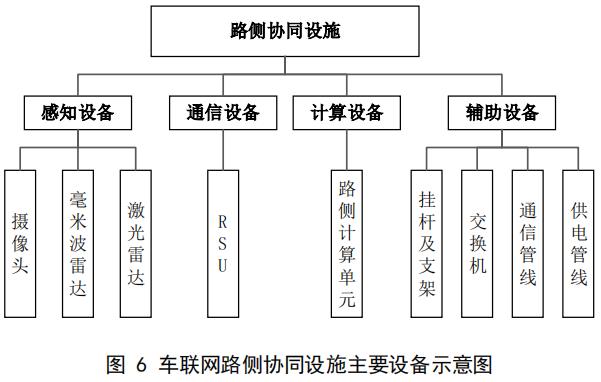
路侧协同设施对道路交通状态进行检测,并将其处理为结构化数据,向周围车辆进行广播。路侧协同设施应包含路侧通信设备、感知设备、计算设备及辅助设备等,如图 6 所示。
通信设备、感知设备和计算设备均应具备自诊断与报警功能,设备检测信号丢失、系统设备故障、网络通信故障等各种情况发生时,系统能够自诊断、记录并报警。
通信设备、感知设备和计算设备均应满足物理环境安全、通信网络安全、区域边界安全、计算环境安全和安全管理应符合国标、行标有关要求,详见第 6.7 条。
通信设备、感知设备和计算设备均应符合下列电磁兼容要求:
对整机静电放电抗扰度的要求应符合 GB/T 17626.2 《电磁兼容试验和测量技术静电放电抗扰度试验》的有关规定;
对浪涌和抗冲击电流的要求应符合 GB/T 17626.5《电磁兼容 试验和测量技术 浪涌(冲击)抗扰度试验》的有关规定;
对辐射骚扰测试的要求应符合 GB/T 9254《信息技术设备的无线电骚扰限值和测量方法》的有关规定;
对辐射抗扰度的要求应符合 GB/T 17626.3《电磁兼容试验和测量技术射频电磁场辐射抗扰度试验》的有关规定;
对 POE CE 和 CS 的要求应符合 GB/T 9254《信息技术设备的无执行线电骚扰限值和测量方法》的有关规定;
对 POE EFT 的要求应符合 GB/T 17626.4《电磁兼容试验和测量技术电快速瞬变脉冲群抗扰度试验》的有关规定。
通信设备、感知设备和计算设备的工作电源应采用联合接地方式,具有输入防反接保护功能,输入过流保护功能。
通信设备、感知设备和计算设备应同时支持本地和远程设备管理与维护,应提供必要的配置管理、性能管理、故障管理、维护管理、安全管理、日志管理和软件管理。
6.2.1.1 通信设备
通信设备应包含具备直连通信广播功能的 RSU 设备,并符合车联网(智能网联汽车)直连通信无线电设备技术要求,详见附录 A。
通信设备应由通信子系统、定位时钟同步子系统、数据处理单元和天线等构成。
通信设备应具备联网通信功能,可通过有线或无线方式与计算设备或 V2X 云控基础平台进行通信。
6.2.1.2 感知设备
感知设备的感知能力应能实现交通流检测、交通事件检测、车辆及行人检测等功能。
感知设备应至少包含摄像头和毫米波雷达,关键路段宜配备激光雷达。
感知设备应具备时钟同步功能。
感知设备应具备通信功能,能够将其感知信息采用有线或无线方式发送至计算设备。
6.2.1.3 计算设备
计算设备应具备数据处理、感知融合、数据存储等功能,可由数据处理与控制单元、数据存储单元、通信接口构成。
计算设备应具备联网通信功能,可通过有线方式与 V2X 云控基础平台等连接。
6.2.1.4 辅助设备
承载杆体应采用新建或改建方式,与其它设施协同建设。
承载杆体的设计应符合 JTG D70-2《公路隧道设计规范第二册交通工程与附属设施》、GB 50068《建筑结构可靠性设计统一标准》
中相关规定,使用年限应为 25 年,安全等级符合二级标准。
承载杆体应具备防雷击、防浪涌冲击、防雨等隔离防护能力。
承载杆体的供电系统应遵循安全可靠、节能高效、技术先进、经济合理的原则,为承载电子设备提供稳定、持续、可靠的能源供给。
6.2.2 功能及性能要求
6.2.2.1 通信设备
通信设备的通信子系统应具备接收和发送无线信号的功能,至少应该支持广播数据发送。
通信设备数据传输协议应满足 T/CSAE 53 《合作式智能运输系统 车用通信系统应用层及应用数据交互标准》标准 5-7 节要求。
通信设备应支持软件远程升级,除 T/CSAE 53 《合作式智能运输系统 车用通信系统应用层及应用数据交互标准》第 6 节所规定的消息集,应支持增加消息集,以实现更多场景。
通信设备应满足 T/ITS 0110 《基于 LTE 的车联网无线通信技术 直接通信系统技术要求》、YD/T 3755 《基于 LTE 的车联网无线通信技术 支持直连通信的路侧设备技术要求》、车联网(智能网联汽车)直连通信无线电设备技术要求(附录 A)等技术要求。
通信设备应具备接受高精度定位设施提供的时钟信号,并用于其自身的时钟同步。
通信设备应具备通过直连通信链路为车辆提供时钟同步信号的功能。
通信设备应具备以下数据接口:
一般数据接口应支持:TCP/IP、UDP/IP 传输协议。应支持HTTP 等协议;
安全接口应支持 TLS、DTLS 协议;
应支持网络管理协议,宜为 TR069、SNMP 中的一种;
扩展数据接口应根据实际情况确定。
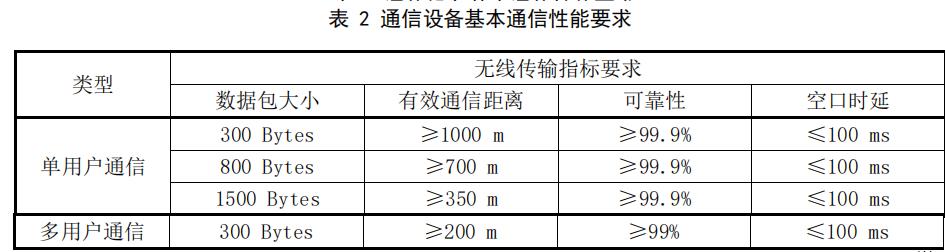
通信设备进行 V2I 业务传输时,至少应满足表 2 列举的无线传输指标要求。
通信设备在高速公路和一级公路直线路段,有效通信范围直径不低于 320 米。
通信设备的 MTBF 应不小于 100 000 h,设备可用性应不低于99.9%。
通信设备日志本地存储时间不少于 7 天。
6.2.2.2 感知设备
感知设备应具备自清洁功能。
感知设备的融合感知应具备目标检测功能,可实现对路段、匝道和转角盲区范围内的机动车、非机动车、行人的识别检测以及定位。
感知设备的融合感知目标检测应具备连续性要求,包含同一站点感知目标的融合跟踪以及相邻站点同一目标的融合跟踪。
感知设备的融合感知应能检测障碍物类型、障碍物速度、障碍物位置等交通特征信息,并满足下列性能要求:
障碍物类型检测:机动车类型检测准确度不低于 90%,非机动车、行人类型检测准确度不低于 85%;
障碍物速度检测:当机动车速度小于 100 km/h 时,道路实测误差应不超过-6 km/h~0 km/h。当机动车速度大于或等于 100 km/h 时,道路实测误差应不超过机动车速度的-6%~0%;
障碍物位置检测:平均位置误差不大于 1.5 m;
障碍物数据信息最小输出间隔应不大于 100 ms。
感知设备能直接存储或通过计算设备存储有效的检测信息,存储容量应满足存储最近 15 天,时间间隔 2 min 的检测数据。设备在断电 72 h 内,存储的交通数据不应发生丢失现象。
感知设备的 MTBF 应不小于 30 000 h。
6.2.2.3 计算设备
计算设备应具备对摄像机、雷达、气象站等独立感知设备的数据处理与分析结果上报功能。
计算设备应具备将感知数据处理结果输出功能,至少 1 路输出到通信设备,1 路输出到 V2X 云控基础平台。
计算设备应支持第三方应用、模型和算法的快速部署。其中的应用、模型和算法应支持与 V2X 云控基础平台的协同运行和数据互通。
计算设备应支持软件 OTA 升级。
计算设备应具备高精度地图静态数据的远程调用和本地存储功能,并支持地图数据与其他接入该设备的路端感知数据的融合处理。
计算设备可根据实际情况增加相应的路端设备控制功能。
计算设备应同时支持本地或远程的数据的存储、检索功能。
计算设备应具备以下故障管理功能:
设备自检功能。自动检测设备状态和故障并上报自动驾驶监测与服务中心;
系统资源监测与告警功能。当 CPU 计算资源、存储空间等重要设备资源不足时,应自动向自动驾驶监测与服务中心发出报警信息;
计算设备应根据实际情况对关键的算法或软件功能的运行状态或数据进行监测,在软件运行异常或数据超出规定阈值后向自动驾驶监测与服务中心发出报警信息。
计算设备的通信接口应支持以下功能:
计算设备应具备对接自动驾驶监测与服务中心的数据交互接口,宜具备对接其他路端设备的数据交互接口;
计算设备的安全接口应支持 TLS 或 DTLS 协议;
计算设备应支持网络管理协议,宜为 TR069 或 SNMP 中的一种。
计算设备的 MTBF 应不小于 100 000 h,设备可用性应不低于99.9%。
计算设备的本地检测数据的存储应能够连续存储 168 小时的数据。支持 12 TB 存储容量,16 路 1080 p@4Mb 码流视频缓存 7 天,8 路 1080P@4Mb 码流视频缓存 30 天。
计算设备应同时支持网络通信接口及串行通信接口,且雷达和高清视频处理数量各不低于 2 路。
计算设备应支持设备时间的保持和维护,时钟同步精度不低于10 ms。
计算设备以太网口类接口应支持不低于 1000 Mbps 的通信速率。
6.2.2.4 辅助设备
承载杆体设计时应综合考虑其承载设备的安装部署需求,应采用“基础杆+挂载设备”结构,挂载设备及连接件应采用模块化、标准化设计,便于设备的安装、更换、拆卸、维护,挂载设备按照实际需求配置,降低建设成本。
承载杆体应参考现有监控杆、通信杆、交通杆、智慧灯杆等城市杆件标准进行设计,并综合考虑挂载设备的工作环境、安装空间、承重、整体安全性、稳定性、通信、用电等因素,技术参数指标需满足杆体所挂载设备正常工作需求。
承载杆体应该为挂载设备提供稳定可靠、持续保持的固定能力。
包括:挂载设备固定后能不受时间和环境因素而发生位移、形变、腐蚀及其他化学的、物理的故障。并能确保灯杆自身及挂载设备不对道路交通、行人等造成坠落、阻挡、触点、盲区阻碍等风险。
承载杆体在设计上应充分考虑功能设备的可拓展性,为挂载设备和配套设施预留接口,后期可在满足杆体荷载要求的条件下便捷加装、更换设备。
承载杆体应为其承载设备提供 24 小时供电,并配备备用电力供应措施。
承载杆体应根据道路特点、设备需求,合理确定外部电源、自备应急电源的供配电系统方案,并遵循 JTG D80《高速公路交通工程及沿线设施设计通用规范》、JTG D70-2《公路隧道设计规范第二册交通工程与附属设施》等标准中供配电设施的设计规范。
承载杆体供配电系统的建设应综合考虑供电电压、功率因数、电能质量、供能效率等因素,符合 GB 50052《供配电系统设计规范》、GB 50053《20kV 及以下变电所设计规范》、GB 50054《低压配电设计规范》、GB 50055《通用用电设备配电设计规范》、GB 50217《电力工程电缆设计标准》等标准、规范。
承载杆体应为其承载设备提供通信管线,各承载杆体可通过光纤网络与 4G/5G 基站或边缘云平台连接。
6.2.3 安装部署要求
路侧协同设施建设方案宜考虑安全冗余设计:
计算设备自带冗余设计,如双系统功能备份;
感知设备可与其它计算设备或边缘云连接,当计算设备出现故障时,可以从系统中调配相近设备或边缘云接替工作。
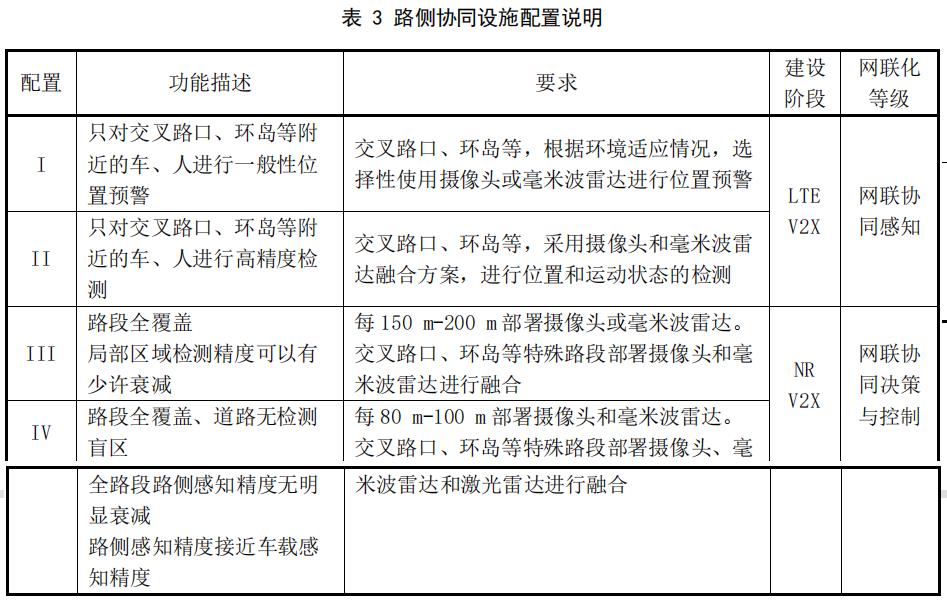
路侧协同设施宜根据道路情况及建设目标,划分不同的建设等级,设计相应的配置等级,根据道路车路协同站点分布及对应的设备配置,可参考表 3 所示配置划分表:I、II、III、IV。
不同道路对应的配置选项宜参考表 4 所示:

交通流量大、事故发生率高的路段宜全路段连续覆盖。
交叉路口、环岛、匝道、隧道、掉头、弯道等特殊路段应重点部署。
连续部署路段路侧通信设备部署间距宜 200 m~400 m,部署位置宜选择道路两侧交叉布设,特殊路段应补充部署。
计算设备应根据感知设备的数量进行部署,可多套感知设备共用一个计算设备。
特殊路段的路侧感知范围应对该路段进行全面覆盖。
路侧设备的部署安装位置应结合产品的性能及场景需求合理设计、选择,不同类型的传感器应根据其探测范围交叉部署,实现互补。
路侧设备的部署方案应充分考虑各设备的性能,选择合适的挂高、位置、角度等。
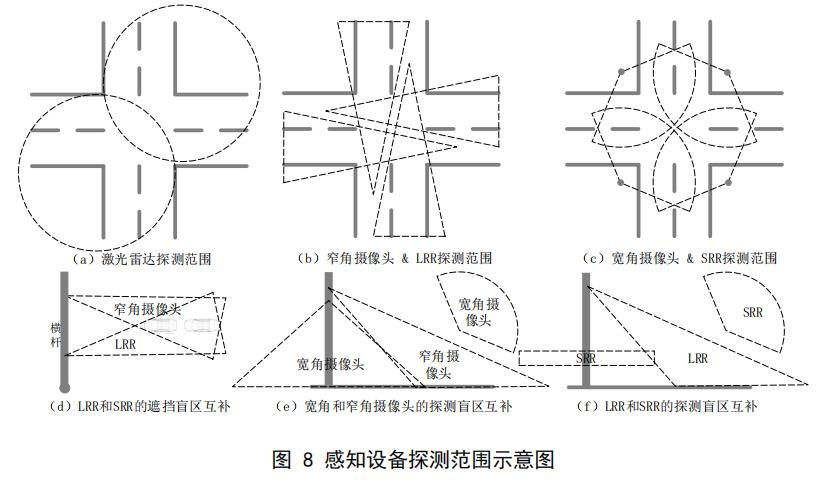
十字路口部署宜参考图 7所示方案(配置 IV),其它配置可在此基础上进行简配:
激光雷达在十字路口宜安装 2 个,对角部署,实现交叉路口的全面探测(如图 8(a)所示);
窄角摄像头/LRR 在十字路口宜安装 4 个,部署在承载杆体的横杆上,面向来向车辆(如图 8(b));
宽角摄像头/SRR 在十字路口宜安装 4 个,部署在承载杆体的竖杆上,面向路口中心位置(如图 8(c)),通过感知融 合避免中间隔离带或大型车辆的遮挡;
同一横杆上的窄角摄像头和 LRR 宜采用两端分布交叉部署(如图 8(d)),通过感知融合避免前车对后车的遮挡;
窄角摄像头和宽角摄像头应根据设备的性能(如探测距离、角度等),选择安装高度和角度,实现探测区域的盲区互补,如图 8(e)所示;
LRR 和 SRR 应根据设备的性能(如探测距离、角度等),选择安装高度和角度,实现探测区域的盲区互补,如图 8(f)所示。

6.3 基站及网络系统建设技术要求
6.3.1 一般要求
基站建设主要指 4G 和 5G 基站,提供蜂窝无线网络环境,信号覆盖范围内,车辆可通过 V2N 方式与互联网、云平台等通信。
基站建设的选址、设计、施工与验收,应遵守现行国家、行业及省市相关标准、规范规定:
YD/T 3568《通信基站基础设施技术要求》;
YD/T 3698《无线通信基站及其辅助设备对人体的安全要求》;
YD/T 2583《蜂窝式移动通信设备电磁兼容性要求和测量方法》;
GB 51194《通信电源设备安装工程设计规范》;
YD/T 3593《基于 LTE 的车联网无线通信技术 核心网设备技术要求》;
YD/T 3618《5G 数字蜂窝移动通信网 无线接入网总体技术要求》。
网络系统建设主要是指光纤网络,用于设备的长距离连接和数据通信。
6.3.2 性能及通信要求
V2N 依赖 4G 或 5G 的蜂窝网络,采用 Uu 接口实现蜂窝通信,应满足相应国标、行标要求,如 5.2.3 条所示。
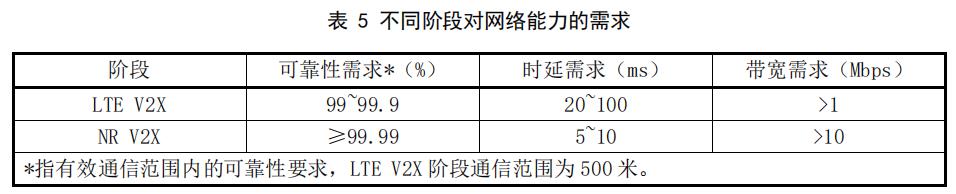
车联网先导区面向未来的 NR V2X,车辆的应用可分为辅助预警类(LTE V2X 阶段)和控制类(NR V2X 阶段)两个阶段,不同阶段对网络能力的需求如表 5 所示。
6.3.3 部署要求
车联网先导区建设应同步部署 5G 网络,实现先导区路段全面覆盖 5G 信号,信号连续,满足车辆 V2N 使用要求。
车联网先导区建设路段应部署光纤网络。
6.4 交通设施建设技术要求
6.4.1 一般要求
交通设施建设包括交通信号灯、交通标示、交通标线的改建和新建,以更好的满足智能网联汽车的行驶需求。
交通信号灯包括公路路口信号控制设施、车道通行信号控制设施、匝道信号控制设施、隧道交通信号控制设施、避险车道信号控制设施等。
先导区的同一用途交通信号灯类型应统一标准,交通信号灯的改建或新建应符合 GB 14887《道路交通信号灯》、GB 14886《道路交通信号灯设置与安装规范》等相关规定。
交通标示包括可变信息标志、可变限速标志、服务区信息屏、服务区停车诱导设施等。
先导区的同一用途交通标示类型应统一标准,交通标示的改建或新增应符合 GB/T 23828《高速公路 LED 可变信息标志》、GB 23826《高速公路 LED 可变限速标志》、GB/T 29103《道路交通信息服务通过可变情报板发布的交通信息》、GB/T 26770《停车诱导信息集》等相关规定。
适应智能网联汽车的交通标志标线分为两种类型:
实体交通标志标线:设置在道路上用规定的图形、符号、文字、线条、立面标记、突起路标等形式表示特定管理内容和行为规则的交通设施;
数字化交通标志标线:将交通标志标线承载的交通规则、道路状态等信息转化为更易于机器辨识的数字信息,并以信息化的手段进行发布或传输的交通设施。
实体交通标志标线的升级和新建应符合 GB 5768 《道路交通标志和标线》、JTT 280 《路面标线涂料》、GBT 16311《道路交通标线质量要求和检测方法》等相关规定执行。
交通信号灯、交通标示、实体交通标志标线应经常清洁、维护,保证视认性,应避免被树木遮挡、被路灯照明影响视认等。
6.4.2 数字化交通设施建设要求
交通信号灯应具备联网功能,可通过有线或无线方式与路侧计算设备相连,或者交通信号灯管控平台与 V2X 云控基础平台互联,实现数据共享。
交通信号灯的控制机应统一数据格式,并符合 GB 25280 《道路交通信号控制机》等相关规定。
交通标示应具备联网功能,可通过有线或无线方式与 V2X 云控基础平台相连。
数字化交通标志标线应具备存储功能,可存储实体交通标志标线所承载的交通规则、道路状态等信息,可根据交通管理需求,对所承载的交通规则、道路状态等信息进行调整或更改。
数字化交通标志标线的信息编码应包含一下主要内容:
位置:交通标志标线部署的地理位置;
适用范围:交通标志标线适用的路段范围、行车方向、车道、车型等;
有效时间:交通标志标线信息在区域路段内有效的时间范围。
交通标志标线信息:交通标志标线的类别、信息内容、附加说明等;
校验信息:用于数字化交通标志标线编码的校验。
数字化交通标志标线的 MTBF 应不小于 100 000 h,防护等级应不低于 IP65。
6.4.3 部署要求
先导区覆盖范围内的交通信号灯、交通标示、实体交通标志标线均应满足智能网联汽车的需求,对不满足要求的应改建。
先导区覆盖范围内新建的交通信号灯、交通标示应具备联网功能,并统一标准,如型号、数据格式等。
先导区覆盖范围内原有的交通信号灯、交通标示应升级,使其具备联网功能。
先导区覆盖范围内宜建设数字化交通标志标线。
实体交通标志标线的部署要求应遵循 GB 5768《道路交通标志和标线》、JTGD82《公路交通标志和标线设置规范》的相关规定。自动驾驶专用车道应设置突起路标,并符合 GB 5768《道路交通标志和标线》与 JTG D82《公路交通标志和标线设置规范》中对突起路标的相关规定。
6.5 高精度定位设施建设技术要求
6.5.1 一般要求
定位设施应给车辆提供精准定位服务。
定位设施包括高精度定位设施和路侧辅助定位设施两类。
定位设施的应符合 6.7 条所述安全要求。
高精度定位设施由基准站系统、数据传输与综合处理系统、服务数据播发系统构成,如图 9 所示。
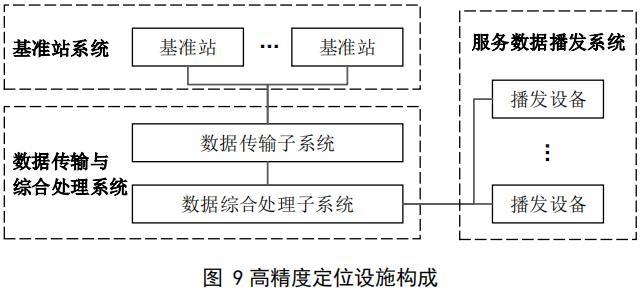
高精度定位设施应能够基于北斗卫星导航系统或 GPS 发射的导航信号进行卫星导航增强信息(以下简称“增强信息”)的生成与播发。
6.5.2 功能及性能要求
高精度定位应满足以下定位精度的要求:
协同感知(LTE V2X)阶段,车辆的定位精度应≤1.5m;
协同决策/控制(NR V2X)阶段,车辆的定位精度应≤0.2m。
高精度定位设施的基准站系统应由若干基准站构成。基准站系统中应至少包括 1 个监测基准站。
基准站根据应用场合不同分为观测基准站和监测基准站。
观测基准站应具备如下功能要求:原始观测数据采集功能、时间自主同步功能、多路通道同时通信功能、数据传输功能、远程管理功能、远程设备控制、基础保障功能、基准站运行状态监测功能、智能化的故障定位功能。
监测基准站应具备观测基准站功能,同时具备以下功能:
卫星导航增强信息质量监测功能;
支持接收不同频率传播的卫星导航增强信息,对增强信息的准确性做监测;
具备与控制站间的专用数据通道,并通过该专用数据通道向控制站反馈检测数据丢失率、传输延迟、定位结果数据。
基准站应满足如下性能要求:
基准站接收机原始观测数据采样时间间隔不大于 1 s;
原始观测数据传输时延无线网络应不大于 300ms,专线网络应不大于 100ms;
在实时数据流传输模式下,原始观测数据传输间隔应为 1 s。
星历数据传输间隔为 30 s;
基准站本地时间与 BDT 的同步精度应高于 50 ns;
原始观测数据、基准站告警及故障数据本地存储能力应不小于 30 天;
基准站各设备及性能要求应满足相应国标要求。
辅助定位设施应能够在辅助定位服务范围内提供相对定位精度高于 10m 的定位服务。
辅助定位设施应具备设备或系统自动故障检测与报警功能。
辅助定位设施应能够接受并执行来自自动驾驶监测与服务中心的基本控制指令,包括系统启动运行、系统停止运行和系统参数更新。
6.5.3 部署要求
基准站部署于路端,应根据所需覆盖的公路路线及周边环境特点进行设计布局,一般情况下站间距不应大于 60 km,核心区域间距不应大于 35km。
基准站部署点位应具有良好的卫星通视条件,并应避开电磁干扰区域。
基准站部署点位与公路(主干线、桥梁、隧道等)等震动源的直线距离应大于 200 m。
在隧道等 GNSS 信号受遮挡的环境中,应增设路侧辅助定位设施。
6.6 LTE V2X 车载终端技术要求
6.6.1 一般要求
LTE V2X 车载终端可支持 V2V、V2I、V2N 和 V2P 等类型应用,利用这些应用可提供道路安全、交通效率提升和信息娱乐等各类业务。
LTE V2X 车载终端应支持直连通信(PC5 接口)通信和蜂窝通信(Uu 接口)。
LTE V2X 车载终端的工作频段应符合国家无线电管理机构的相关规定,如《车联网(智能网联汽车)直连通信使用 5905-5925MHz频段管理规定(暂行)》,性能指标参见附录 A。
LTE V2X 车载终端应符合相关电磁兼容要求,具体要求可参见6.2.1 节。
LTE V2X 车载终端的物理环境安全、通信网络安全、区域边界安全、计算环境安全和安全管理应符合国标、行标有关要求。
6.6.2 功能及性能要求
LTE V2X 车载终端应具备接收和发送无线信号的功能,接收和发送的消息集包含但不限于:
接收:车辆基本安全消息(Msg_BSM)、地图消息(Msg_MAP)、交通事件消息及交通标志标牌信息(Msg_RSI)、路侧安全消息(Msg_RSM)、信号灯消息(Msg_SPAT)等;
发送:车辆基本安全消息(Msg_BSM)等。
消息集应符合 T/CSAE 53 《合作式智能运输系统 车用通信系统应用层及应用数据交互标准》中第 6 节的车辆安全信息消息集。
LTE V2X 车载终端设备各项性能要求应满足 YD/T 3756《基于LTE 的车联网无线通信技术 支持直连通信的车载终端设备技术要求》 7-10 节内容要求。
LTE V2X 车载终端对直连通信数据进行编译和解析应符合通信相关国家和行业标准。
面向 NR V2X 的车载终端应支持 LTE-V2X 直联模式,支持 5G-NR FR1 运营商的典型频段,可扩展 NR V2X 功能。
车载终端应具备 RTK 差分高精度定位解析功能,支持厘米级GNSS 差分 RTCM 协议,差分数据刷新频率 10Hz(具备支持 NR Band信息等会发出)
6.6.3 通信技术要求
LTE V2X 车载终端的 PC5 接口应满足车联网(智能网联汽车)直连通信无线电设备射频技术要求,参见附录 A。
LTE V2X 车载终端的 PC5 接口应满足 3GPP R14 标准及国标/行 标相关要求,如 T/ITS 0110《基于 LTE 的车联网无线通信技术 直接通信系统技术要求》中 6 节内容、YD/T 3756《基于 LTE 的车联网无线通信技术 支持直连通信的车载终端设备技术要求》中 7、10 节内容要求等。
LTE V2X 车载终端的 Uu 接口应满足 3GPP R14 标准及国标/行标相关要求,详见 4.2.3 条。
LTE V2X 车载终端通信应符合 YD/T 3594《基于 LTE 的车联网通信安全技术要求》相关规定。
LTE V2X 车载终端应具备 WiFi、BT 接入机制,可以实现与车载多媒体单元的联接。
6.6.4 装配要求
车联网先导区的服务车辆应配备 LTE V2X 车载终端。
LTE V2X 车载终端实车装配前,应满足台架测试要求,包括性能测试、功能测试、通讯测试等。
LTE V2X 车载终端的装配前应满足量产要求和整车装配技术要 求,不能对车辆产生安全风险。
6.7 安全技术要求
6.7.1 一般要求
车联网安全要求应包括物理环境、通信网络、区域边界、计算环境、安全管理等通用要求以及云计算安全扩展要求、移动互联安全扩展要求、物联网安全扩展要求、工业控制系统安全扩展要求。
车联网设施应采用交通运输行业密钥管理与证书认证系统构建统一的网络信任体系,实现应用系统的数据加密认证和传输。
车联网的网络安全等级应不低于 GB/T 22239《信息安全技术网络安全等级保护基本要求》中的第三级安全要求。
车联网的通信安全应满足 YD/T 3594《基于 LTE 的车联网通信安全技术要求》等相关规定。
6.7.2 技术要求
6.7.2.1 安全物理环境要求
路侧设施应具备部署在具有防盗、防破坏条件的环境。路侧设施及主要部件需要进行固定,并设置明显的不易除去的标记。室外机柜应具备硬件防盗设计,柜体无裸露可拆卸部件。
路侧设施的部署应远离强电磁干扰环境,或实施电磁屏蔽措施,避免电磁干扰。
路侧设施的室外机柜内部应安装防雷和接地保护装置,具备防雷击和防浪涌冲击的能力。
路侧设施的室外机柜应安装剩余电流式电气火灾监控探测器、测温式电气火灾监控探测器等防火监测设备,室外机柜柜体应采用铁皮或其他防火材料。
路侧设施的室外机柜应具备防尘、防水、防潮设计,防护等级应不低于 IP65。
路侧设施工作温度范围应满足-20℃~+55℃(寒区-35℃~+40℃),湿度范围应满足 5%~95%(无凝露)。各地区可根据气候地理条件,进行温湿度适应范围调整。
6.7.2.2 安全通信网络要求
车联网的网络架构应符合下列要求:
应根据业务职能、信息重要性等因素,划分不同的网络区域,并单独划分测试区域。应采取有效措施对各网络区域进行网络安全技术隔离,并按照便捷管理和集约管控的原则为各个网络区域分配地址;
通信传输应提供链路冗余,关键通信设备应采用双机备份。
通信传输应符合下列要求:
应采用校验技术或密码技术保证通信过程中数据的完整性。
应采用密码技术保证通信过程中的保密性;
应用采用 SSL、IPSEC 等密码技术保证路侧设施与自动驾驶监测与服务中心通信过程中数据的机密性;
应采用数字证书、数字签名、消息认证等密码技术保证路侧设施与通信网关间数据的完整性;
应采用数字签名、HMAC 等密码技术对路侧设施的信息交换进行可信验证;
应采用数字信封等密码技术,对交通感知设施采集的敏感数据(如车辆信息等)进行加密传输,加密过程应在交通感知设施内完成;
应采用统一的数字证书认证体系,实现区域路段内公路设施全国视频监测设施的互联互通;
当密码技术、密码产品包含密码模块时,密码模块安全等级应不低于 GB/T 37092《信息安全技术密码模块安全要求》中的安全二级;
密码算法及密码产品应用满足国家密码管理相关规定。
6.7.2.3 安全区域边界要求
安全区域边界防护应符合下列要求:
通过防火墙等边界防护设备,保证跨越网络区域边界的访问和数据流通过边界设备提供的受控接口进行通信;
应能够对非授权设备私自联到内部网络的行为进行检查或限制,能够对终端或用户非授权连接到外部网络的行为进行检查或限制,阻止非授权访问。
安全区域边界的访问控制应符合下列要求:
应在划定的网络区域边界防护设备上根据访问控制策略设置访问控制规则,默认情况下除允许通信外,受控接口拒绝所有通信;
应优化安全设备的访问控制列表,删除多余或无效的访问控制规则,使访问控制规则数量最小化;
应能根据会话状态信息为数据流提供明确的允许/拒绝访问的能力,控制粒度为传输层端口级,对源地址、目的地址、源端口、目的端口和协议等进行检查,确定是否允许数据包进出该区域边界。
安全区域边界应进行入侵防范,在关键网络节点处检测网络攻击行为,当检测到攻击行为时,记录攻击源 IP、攻击类型、攻击目标、攻击时间,在发生严重入侵事件时应提供报警。
6.7.2.4 安全计算环境要求
车联网设施的身份鉴别应符合下列要求:
对路侧设施的管理员应进行身份标识和鉴别,且保证在系统整个生存周期用户名具有唯一性;
应采用数字证书、数字签名等密码技术进行身份鉴别, 当只采用“用户名+口令”鉴别方式,用户口令须由大小写英文字母、数字、特殊字符 3 种以上组成、长度不少于 8 位,每 90 天更换;
应具备登录失败处理功能,登录失败后采取结束会话、限制非法登录次数和自动退出等措施,连续 5 次登录失败锁定 10分钟;
当进行远程管理时,应采取 SSH、HTTPS 等方式防止鉴别信息在网络传
以上是关于广州市车联网先导区建设总体技术规范的主要内容,如果未能解决你的问题,请参考以下文章