OpenCV中的立体图像创建深度图
Posted 程序媛一枚~
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了OpenCV中的立体图像创建深度图相关的知识,希望对你有一定的参考价值。
这篇博客将介绍如何从立体图像创建深度图。
1. 效果图
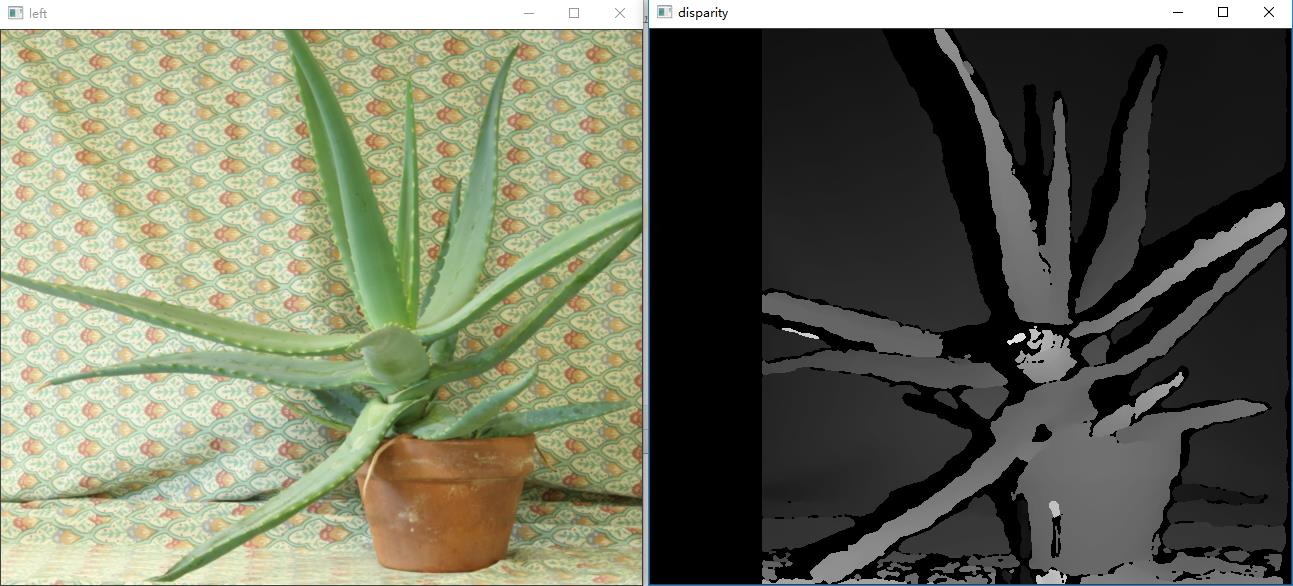
原图 VS 视差图效果如下:
可以看到结果受到高度噪音的污染。通过调整 numDisparities 和 blockSize 的值,可以获得更好的结果。
2. 源码
# 立体图像匹配和点云生成的简单示例。
from __future__ import print_function
import numpy as np
import cv2 as cv
ply_header = '''ply
format ascii 1.0
element vertex %(vert_num)d
property float x
property float y
property float z
property uchar red
property uchar green
property uchar blue
end_header
'''
def write_ply(fn, verts, colors):
verts = verts.reshape(-1, 3)
colors = colors.reshape(-1, 3)
verts = np.hstack([verts, colors])
with open(fn, 'wb') as f:
f.write((ply_header % dict(vert_num=len(verts))).encode('utf-8'))
np.savetxt(f, verts, fmt='%f %f %f %d %d %d ')
def main():
print('loading images...')
imgL = cv.pyrDown(cv.imread('images/aloeL.jpg')) # 下采样图片以加快处理速度
imgR = cv.pyrDown(cv.imread('images/aloeR.jpg'))
# 针对“芦荟”图像对,调整视差范围
# disparity range is tuned for 'aloe' image pair
window_size = 3
min_disp = 16
num_disp = 40
stereo = cv.StereoSGBM_create(minDisparity=min_disp,
numDisparities=num_disp,
blockSize=16,
P1=8 * 3 * window_size ** 2,
P2=32 * 3 * window_size ** 2,
disp12MaxDiff=1,
uniquenessRatio=10,
speckleWindowSize=100,
speckleRange=32
)
print('computing disparity...')
disp = stereo.compute(imgL, imgR).astype(np.float32) / 16.0
print('generating 3d point cloud...', )
h, w = imgL.shape[:2]
f = 0.8 * w # guess for focal length
Q = np.float32([[1, 0, 0, -0.5 * w],
[0, -1, 0, 0.5 * h], # turn points 180 deg around x-axis,
[0, 0, 0, -f], # so that y-axis looks up
[0, 0, 1, 0]])
points = cv.reprojectImageTo3D(disp, Q)
colors = cv.cvtColor(imgL, cv.COLOR_BGR2RGB)
mask = disp > disp.min()
out_points = points[mask]
out_colors = colors[mask]
out_fn = 'out.ply'
write_ply(out_fn, out_points, out_colors)
print('%s saved' % out_fn)
cv.imshow('left', imgL)
cv.imshow('disparity', (disp - min_disp) / num_disp)
cv.waitKey()
print('Done')
if __name__ == '__main__':
print(__doc__)
main()
cv.destroyAllWindows()
参考
以上是关于OpenCV中的立体图像创建深度图的主要内容,如果未能解决你的问题,请参考以下文章