ESP32 DIY 机器狗
Posted 嵌入式基地
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ESP32 DIY 机器狗相关的知识,希望对你有一定的参考价值。
关注v-x-公-众-号:【嵌入式基地】
后-台-回-复:【电赛】 即可获资料
回复【编程】即可获取
包括有:C、C++、C#、JAVA、Python、javascript、php、数据库、微信小程序、人工智能、嵌入式、Linux、Unix、QT、物联网、算法导论、大数据等资料
原文链接 点击查看
所有使用到的资料,均可在文末下载
今天给大家带来一个开源项目,使用ESP32制作的机器狗。

功能
- 使用手机或电脑登陆网页,即可对其进行控制。
- 具备校准与调试界面
- 可设置机器狗的步态
器件清单
- ESP32
- MPU9250 (目前未使用到)
- MG90D或MG90S舵机(12个)
- INA219模块(可选)
- mini360 DC-DC模块(3个,一个用于ESP32,其余用于前腿、后腿)
- 18650电池(2节)
- 18650电池盒
- 8 x 8x12x2.5mm 轴承
- 胶水
校准
- 打印servo_calib工具并安装舵机:圆盘,圆点,从0到180,每个点10度…
- 使用 tools/servoCalib.ino 并将伺服连接到 14 引脚
- 打开 Arduino IDE 终端并输入1500(然后按 Enter) - 这应该是伺服中间,它应该指向打印工具的中间点
- 减少输入值,找到minAngle和degMin的值
- 从 2100 开始,逐渐增加数值,找到maxAngle并degMax。
组装
- 打印leg_calib工具/模板,一个是原样,另一个是机器人另一侧的Beta和Gamma角度的镜像,以及Alpha角度工具上电伺服并将ESP32连接到您的计算机,打开Arduino IDE终端
- 输入set servo_to_calib将所有伺服设置为打印机工具预期的位置
- 根据工具(90 度、45 度、90 度)组装支腿,尽可能靠近预期的支腿部件位置
电路连接
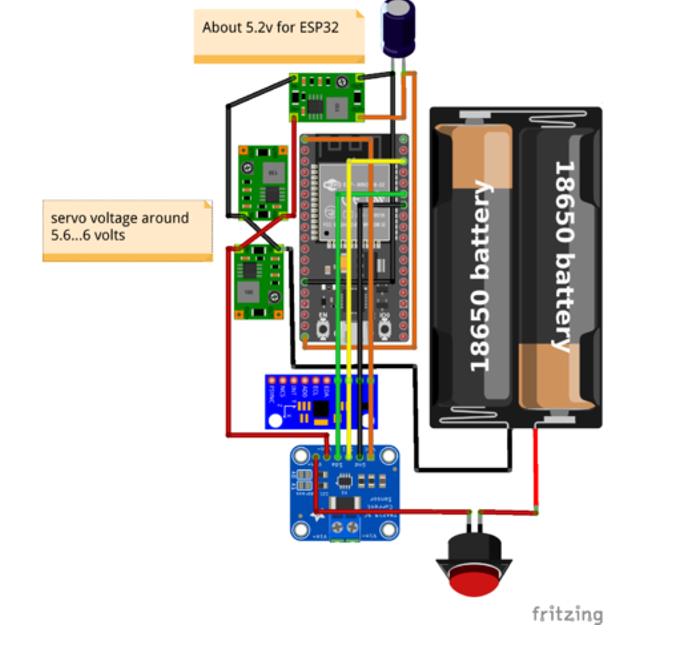
- I2C器件连接到GPIO21与GPIO22
- 左前腿15,16,27
- 右前腿16,18,17
- 左后腿13,12,14
- 右后腿4,2,15
以上引脚连接,可以根据您的需求,修改代码中的定义
依赖库
- ESP Async Web Server
- ESP32 ISR Servo
- MPU9250_WE
- INA219_WE
设置WIFI连接
- 重命名 config_wifi.example.h 文件为 config_wifi.h
- 可修改机器人名称,修改APssid即可
- 将APpass修改为密码
- 打开WIFI搜索并连接 SmallRobotDog WiFi,打开网址http://192.168.4.1/,即可对机器狗进行控制
以上是关于ESP32 DIY 机器狗的主要内容,如果未能解决你的问题,请参考以下文章