ROS2极简总结-新增概念
Posted zhangrelay
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ROS2极简总结-新增概念相关的知识,希望对你有一定的参考价值。
参考文献:ROS2 EXTENDED CONCEPTS
在前2篇博文中总结了ROS2的基本概念,这些内容大致与ROS1类似或改进,属于ROS2/ROS1的核心概念。本节侧重ROS2扩展的新内容。
既然是极简,自然不会面面俱到,以2个例子为主吧。
- 管理节点
- 服务质量
1 管理节点
主要由5个部分组成:
- 状态机
- 状态
- 标准接口
- 命令行接口(CLI)
- 启动文件
- ROS1 中的常见问题反馈是无法控制节点的生命周期。
- 例如:传感器的读取往往在传感器驱动程序之前启动!
- ROS 2 解决方案是具有详细生命周期管理的节点
- CPP implemented,Python pending
- 节点使用 rclcpp_lifecycle::LifecycleNode 而不是常用的 rclcpp::Node
- 符合已知接口和已知生命周期状态机。
- 也称为生命周期 (Lifecycle, LC) 节点
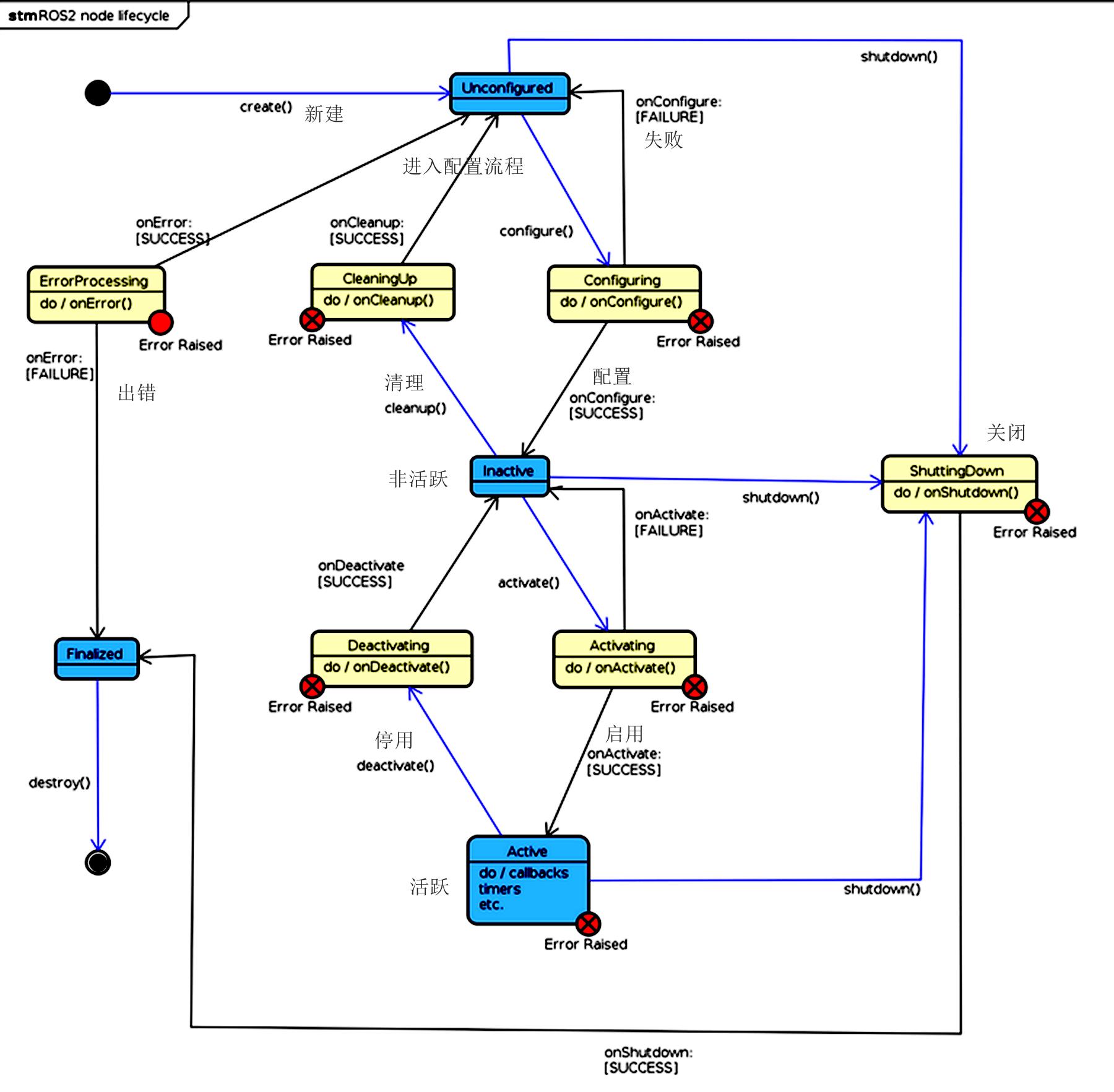
管理节点状态机
状态机具有:
- 主要状态 - 稳态。 一个节点大部分时间都是此类状态。
- 次要状态 - 瞬态。 处理过渡。
- 转换 - 触发状态更改。 用户可以通过启动文件、管理器节点和 CLI 服务调用等方式实现。
详细模型如下图所示:
状态
主要状态
- 未配置 - 节点开始时的第一个状态,并在出现错误后结束。没有执行,其主要目的是错误恢复。
- 非活跃 - 节点持有资源(发布者、监听者等)和配置(参数、内部变量),但什么也不做。 没有执行,没有传输,传入的数据可以保存在缓冲区中,但不能读取。 主要目的是允许重新配置。
- 活跃 - 一切正常。 正常执行。
- 已完成 - 节点已被销毁。 仅用于调试。
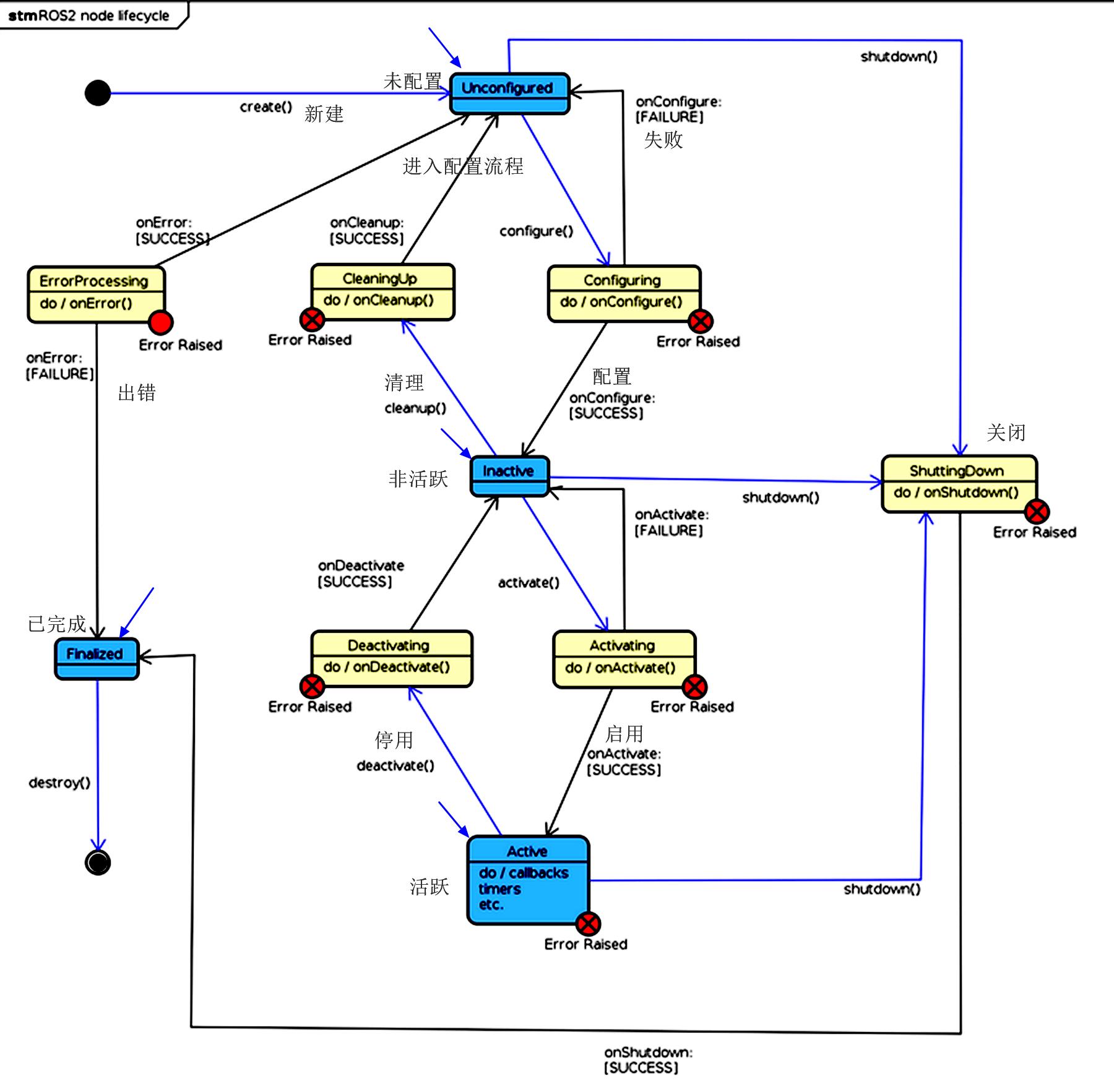
注意下图所示的蓝色箭头所指:
次要状态
执行标准化的回调函数。用户代码在此处实现。
- 配置 - 执行 onConfigure() - 加载配置、冗长的设置步骤、获取节点生命周期内使用的资源,如常量发布者/侦听器、内存缓冲区分配等...
- 清理- 执行 onCleanup() - 放弃资源,擦除内存。 新的开始,清理状态。
- 激活 - 执行 onActivate() - 获取传感器等短期资源,激活所有资源。 设置时间短。 启动主节点任务。
- 停用 - 执行 onDeactivate() - 反向Activatingsteps(反激活)。 暂停执行,释放短期资源。
- 关闭 - 执行 onShutdown() - 最后步骤。 删除剩下的资源等。 没有信息从此处回来。
- 错误处理- 执行 onError() - 错误处理状态。 如果错误可以处理,则恢复到 Unconfigured,否则,转到 Finalized 销毁节点。
有目的地实现回调函数可以避免畸形节点。
典型状态流程

标准接口
创建生命周期节点需要一些标准接口
服务:
- <ns>/change_state - 调用触发合法转换
- <ns>/get_available_transitions - 显示合法的转换
- <ns>/get_state - 显示当前状态
- <ns>/get_available_states - 列出所有状态
- <ns>/get_transition_graph - 显示完整状态机
主题:
- <ns>/<node_name>__transition_event - 发布正在进行的转换
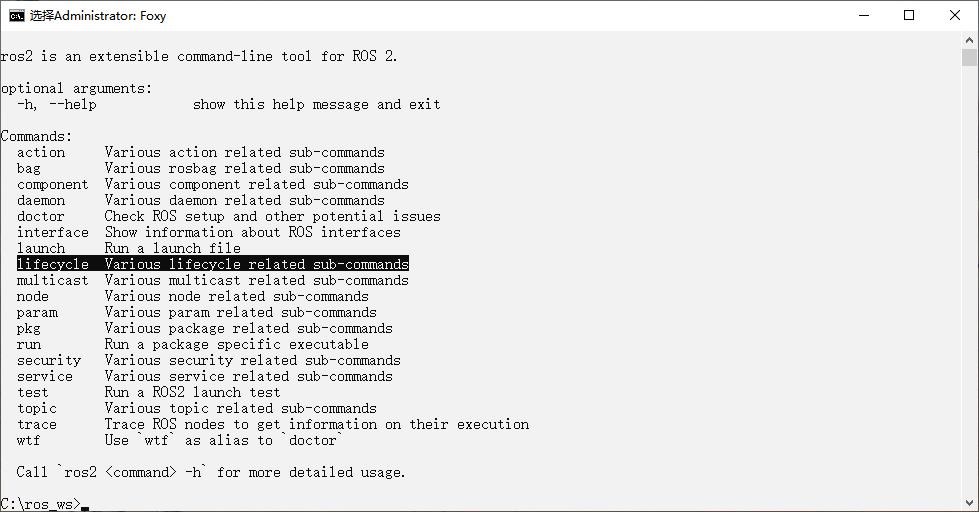
生命周期命令行接口
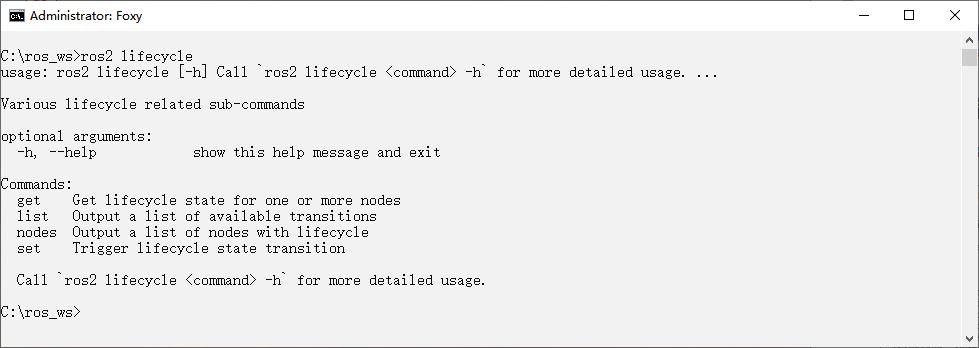
生命周期节点除了可以通过服务进行控制,也可以通过 ros2 lifecycle 进行控制。
- ros2 lifecycle nodes - 列出所有 LC 节点
- ros2 lifecycle get <node> - 列出指定节点或所有 LC 节点的当前状态。
- ros2 lifecycle list <node> - 列出指定节点可能的下一个状态和相应的转换调用(名称和 ID)。
- ros2 lifecycle set <node> <transition> - 在 LC 节点上触发转换(按名称或 ID)。
启动文件中的 LC 管理
ROS2 Python Launch 文件提供了一些 LC API:
- launch_ros.actions.LifecycleNode(..) 定义一个 LC 节点
- launch_ros.event_handlers.OnStateTransition(..) 当 LC 节点从一种状态转换到另一种状态时,执行此动作
- launch.actions.EmitEvent(..) 选择想要触发的事件
- launch_ros.events.lifecycle.ChangeState(..) 通过为 LC 节点选择转换创建更改状态事件
- Lifecycle_msgs.msg 保存状态和转换名称的枚举
2 服务质量(QoS)
介绍如下3个部分:
- 策略
- 概况
- QoS兼容性
ROS 1 通讯协议:
- 默认为 TCP。 无损传输、高延迟、可靠。
- UDP 可选。 有损传输、低延迟、不可靠、不像 TCP 那样丰富地实现。
ROS 2 通讯协议:
- 仅默认 UDP。 (但依赖于 DDS)。 轻量级,允许实时通信。
- 应用 QoS 策略在 TCP 和 UDP 之间灵活变化。
- QoS:称为配置文件的策略组合,应用于发布者、订阅者、服务器端和客户端,定义了这些实体之间的通信质量。
支持 C++ 和 Python 实现。
- C++:qos.h 包含在 <rclcpp.h> 中。
- Python:import rclpy.qos
- 创建 QoS 对象、设置不同的策略或分配现有配置文件。
- 创建资源时将 QoS 对象作为参数传递。
策略
| No. | POLICY NAME | DESCRIPTION | POSSIBLE VALUE |
|---|---|---|---|
| 1 | History | How many incoming data samples (N) to store. | keep_last(size_t N)/keep_all() |
| 2 | Reliability | Guaranteed lossless with retransmission or best attempt with losses. | reliable()/best_effort() |
| 3 | Durability | Publisher persists samples for late joining subscribers or not. | transient_local()/volatile() |
| 4 | Deadline | Maximum acceptable time between messages on a topic. | duration(rmw_time_t/rclcpp::Duration) |
| 5 | Lifespan | Maximum time that a message can sit in a publisher's out buffer. | duration(rmw_time_t/rclcpp::Duration) |
| 6 | Liveliness | Heartbeat frequency. | duration(rmw_time_t/rclcpp::Duration) |
| 7 | avoid_ros _namespace_conventions | Circumvent ROS2 specific naming conventions like "rt_". Suitable for native DDS communication. | True/False |
概况
策略组合。 方便选择个人配置,而不必担心个别策略。
一些默认配置文件已经可用(例如 C++:qos_profiles.h):
- 默认:如果未指定,则默认应用。 类似 ROS1。keep_last(10),reliable(),volatile()...
- 服务:通常服务应该是可靠的。 易失性避免过时的请求 keep_last(10),reliable(),volatile()...
- 参数:ROS2 参数通过服务访问。 类似的配置文件,但深度更长在缓冲区中保留更多参数。 keep_last(1000),reliable(),volatile()...
- 传感器:传感器数据需要具有最小延迟才能保持相关性,但会丢失一些样本。 keep_last(5),best_effort(),volatile()...
也可以创建自定义配置文件。 例如,要制作一个闩锁的发布者:
- rclcpp::QoS qos_profile(10); qos_profile.reliable().transient_local();
兼容性
QOS 资源只有兼容才能配对
QoS 配置文件单独分配给每个资源。
资源兼容性基于“Request vs Offerer”模型
- 仅当订阅者/客户端与发布者/服务器一样/不那么严格时才配对。
- 然后对连接采用两者中较不严格的策略。
为此只考虑持久性和可靠性。 两者都必须满足。
- 持久性严格性:transient_local > volatile
- 可靠性严格性:reliable > best best_effort
案例:
| PUBLISHER | SUBSCRIBER | PAIR? | RESULT |
|---|---|---|---|
| best_effort | reliable | No | . |
| reliable | best_effort | Yes | best_effort |
| best_effort | best_effort | Yes | best_effort |
| reliable | reliable | Yes | reliable |
更多内容查阅ROS2官方文档和案例。
以上是关于ROS2极简总结-新增概念的主要内容,如果未能解决你的问题,请参考以下文章