AGV控制器设计与融合
Posted studyer_domi
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了AGV控制器设计与融合相关的知识,希望对你有一定的参考价值。
提 要
AGV(Automated Guided Vehicle)是自动化物流运输系统、柔性生产组织系统的关键设备。目前,柔性生产的重要性已经逐渐得到国内很多企业的重视,计划购进有关的自动车和自动物流运输线, AGV作为该种生产组织形式的关键设备也受到人们的关注。
对AGV来说,对导航路径跟踪的准确性、平稳性和纠偏的快速性是重要指标,导航控制器的性能是保证这一指标的关键。本文针对单一控制器在应用中的不足,提出了采用多控制器融合的导航路径跟踪控制方法。根据AGV的实际特点,设计了最优控制器和模糊控制器相融合的控制器。论文研究得到了吉林大学科技园项目“新型视觉导航自动车辆AGV”和新星创业计划项目“视觉导航自动车辆
”两个项目的支持。
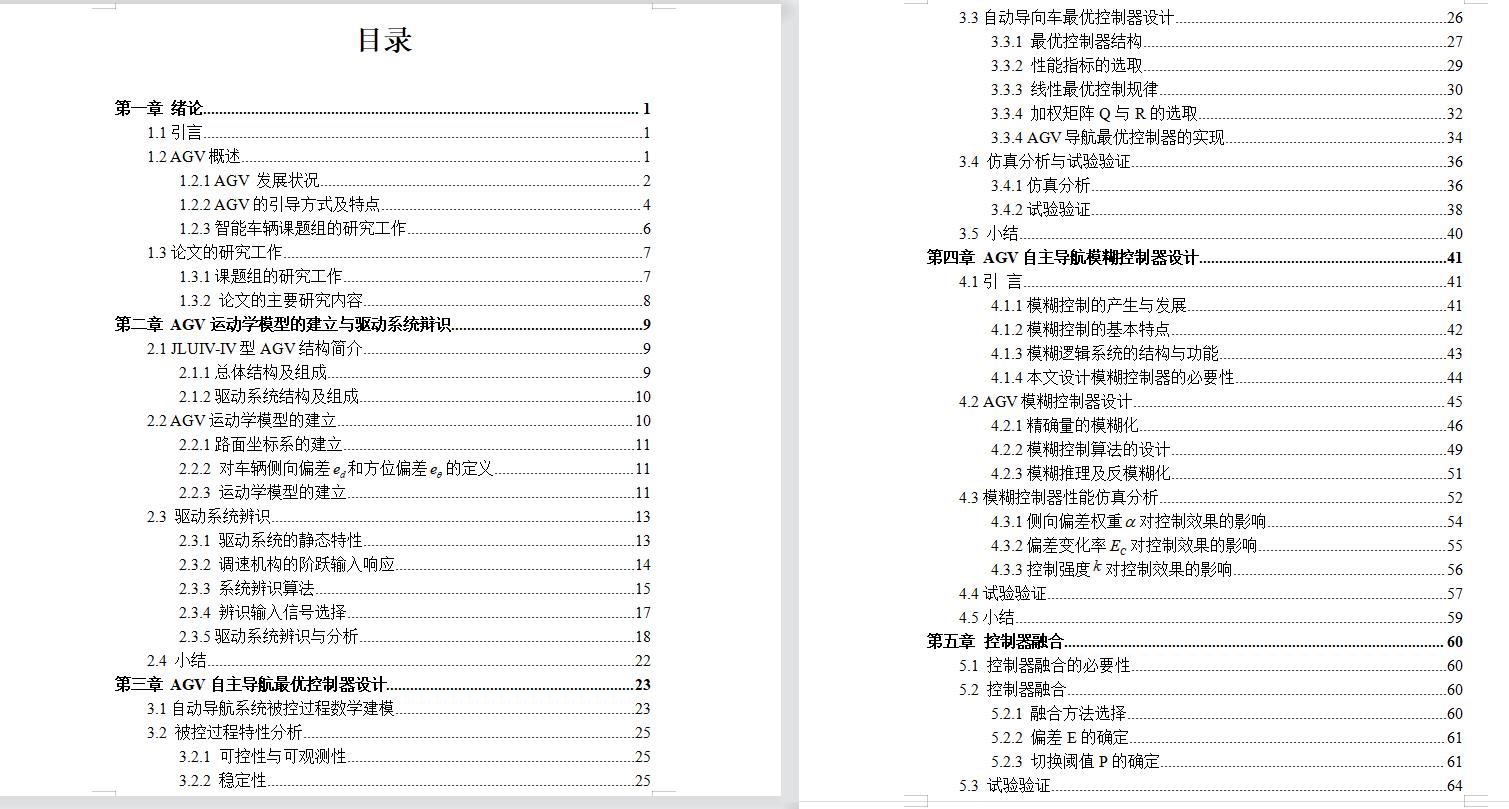
论文研究的内容主要包括以下几个方面:
-
- 为了了解AGV驱动系统的动态特性数,采用伪随机序列作为输入信号利用最小二乘法对系统进行辩识,得到驱动系统的传递函数。
- 以车辆速度偏差、侧向偏差和方位偏差作为系统状态变量,控制信号作为系统输入,设计了AGV自主导航最优控制器。
- 把车辆方位偏差和侧向偏差加权平均得到一个综合偏差E。将这个偏差作为一个输入,将这个偏差的变化率EC作为另一个输入,控制信号作为输出设计双输入单输出自主导航模糊控制器。
- 选择适当的切换点,对两种控制器进行融合。
- 通过仿真及试验,验证了两种导航控制器设计的有效性以及两种控制器融合的必要性。
关键词: AGV 系统辩识 最优控制器 模糊控制器 阈值切换法 控制器融合
以上是关于AGV控制器设计与融合的主要内容,如果未能解决你的问题,请参考以下文章