《计算机视觉中的多视图几何》笔记有限射影摄像机
Posted 黑化咸鱼
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了《计算机视觉中的多视图几何》笔记有限射影摄像机相关的知识,希望对你有一定的参考价值。
目录
前言
学习资料来源为《计算机视觉中的多视图几何(原书第二版)》,本节主要学习基本射影几何和射影摄像机的几何知识
1.二维射影几何与变换
1.1数学基础
1.平面几何与代数的关系:向量就是点,对称矩阵就是二次曲线
2. ----n维标准欧式几何空间
----n维标准欧式几何空间
 ----射影空间,在二维标准欧式几何的基础上拓展了理想点集(无穷远点),有了相异直线相交的概念
----射影空间,在二维标准欧式几何的基础上拓展了理想点集(无穷远点),有了相异直线相交的概念
3.齐次向量:两个只相差一个全局缩放因子的向量
齐次坐标 不与
不与 中任何有限点对应(即理想点)
中任何有限点对应(即理想点)
4.根据对偶定理,可以互换点和直线的作用
1.2射影变换
几何概念的定义:
射影映射(保线变换,射影变换或单应)是把
射影映射是
,
,
共线当且仅当
,
,
也共线
代数定义:
一个平面的射影变换是关于三维齐次向量的一种线性变换,并可以用一个非奇异3*3矩阵表示为
或更简单地表示为

中心投影:把一张平面的点或直线通过固定公共点(投影中心)映射到另一张平面
透视映射:中心投影两张平面建立的坐标系都为直角坐标系。
2.有限射影摄像机
2.1有限摄像机模型
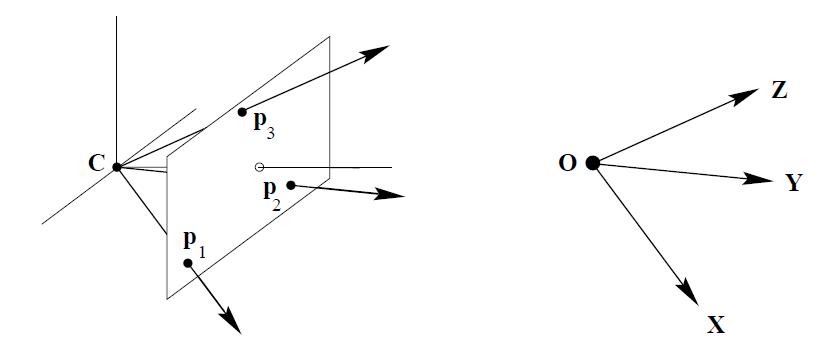
基本针孔模型如下图所示:

考虑空间点到一张平面上的中心投影。令投影中心位于一个欧式坐标系的原点,投影中心C是摄像机中心,也称为光心,图中摄像机中心位于坐标原点。图像平面或聚焦平面 .摄像机到图像平面的垂线是摄像机的主轴或主射线,主轴与图像平面的交点P是主点。过摄像机中心且平行于图像平面的平面是摄像机的主平面。
.摄像机到图像平面的垂线是摄像机的主轴或主射线,主轴与图像平面的交点P是主点。过摄像机中心且平行于图像平面的平面是摄像机的主平面。
摄像机坐标系的 与图像平面的
与图像平面的 的关系由相似三角形写成齐次为:
的关系由相似三角形写成齐次为:


其中, 是考虑主点偏置的主点坐标,K为摄像机标定矩阵。
是考虑主点偏置的主点坐标,K为摄像机标定矩阵。
对于CCD相机,图像坐标以像素来测量,则需要在每个方向上引入不同的尺度因子。若在x和y方向上图像坐标单位距离的像素数分别是
,那么由K还要左乘附加因子,得到CCD摄像机标定矩阵的一般形式:

摄像机坐标系与世界坐标系 的关系由旋转平移表示为:
的关系由旋转平移表示为:

其中R表示摄像机坐标系方向的3*3旋转矩阵, 表示摄像机中心在世界坐标系的坐标。
表示摄像机中心在世界坐标系的坐标。
则图像坐标系与世界坐标系的关系为:

其中P为摄像机矩阵, ,通常不显式地标出摄像机中心。K中的参数称为摄像机的内参数或摄像机的内部校准,R和中的参数称为外参数或外部校准,与摄像机在世界坐标系中的方位和位置有关。
,通常不显式地标出摄像机中心。K中的参数称为摄像机的内参数或摄像机的内部校准,R和中的参数称为外参数或外部校准,与摄像机在世界坐标系中的方位和位置有关。
事实上,P左边的3*3非奇异子矩阵M=KR可以看作是RQ分解,因此P可以写成如下形式:
其中
是P的最后一列。

2.2射影摄像机的几何含义
1.摄像机中心
摄像机中心C是P的一维右零空间,即PC=0.
对于有限摄像机(M非奇异):

对于无穷远摄像机(M奇异):

其中d是M的三维零向量,即Md=0.
2.列向量
射影摄像机的列是3维向量,几何含义是特殊的图像点。对于i=1,...,3,列向量 分别对应于X,Y,Z轴在图像上的消影点,即这些点是轴方向的图像。列
分别对应于X,Y,Z轴在图像上的消影点,即这些点是轴方向的图像。列 是坐标原点的图像。
是坐标原点的图像。
3.行向量
射影摄像机的行是4维向量,在几何上可解释成特殊的世界平面。经证明,摄像机的主平面是P的最后一行 ,
, 依赖于图像的x轴和y轴(与图像坐标系的选择有关)
依赖于图像的x轴和y轴(与图像坐标系的选择有关)

4.主点
事实上主点由下式计算:

其中 是M的第三行。
是M的第三行。
5.主轴向量

是在主轴方向上指向摄像机前方的向量
2.3射影摄像机对点的作用
2.3.1点对射线的反向投影
根据映射x=PX,可以把空间中一个点X投影到一个图像点上,而给定一个图像点x,需要确定空间中哪些点被映射到该点,这些点组成过摄像机中心的一条空间射线。射线上有两个点已知,它们是摄像机中心和点 ,其中
,其中 是
是 的伪逆,
的伪逆, .由这两点的连线可以表示这条射线:
.由这两点的连线可以表示这条射线:

对于有限摄像机,由图像点x反向投影交无穷远平面的点作为第二个点可以导出另一种形式:

2.3.2点的深度
考虑摄像机主平面前后一点离主平面的距离。令 是一个3D点,P是有限摄像机的摄像机矩阵,设
是一个3D点,P是有限摄像机的摄像机矩阵,设 ,则摄像机主平面前方的点X的深度:
,则摄像机主平面前方的点X的深度:


以上是关于《计算机视觉中的多视图几何》笔记有限射影摄像机的主要内容,如果未能解决你的问题,请参考以下文章