第三:启发式搜索:A* 算法
Posted 炫云云
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了第三:启发式搜索:A* 算法相关的知识,希望对你有一定的参考价值。
1、前言
使用 A* 算法求解扫地机器人从起点到终点的最短路径搜索。
2、A*算法
上一关介绍的深度优先搜索和广度优先搜索都是盲目搜索算法,搜索范围比较大,效率比较低。如何在搜索过程中引入启发信息,减少搜索范围,以便尽快的找到解,这种搜索策略则称为启发式搜索。
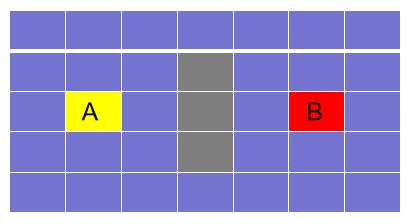
而启发式搜索中最为经典且最常用的算法是 A * 算法。 A* 算法最为典型的应用就是寻路。假设我造了一个扫地机器人,现在这个扫地机器人需要从 A 走到 B 去充电(其中灰色部分表示墙,扫地机器人不能穿墙)。怎样才能让扫地机器人更加智能地找到去充电的最短路径呢?没错,我们可以使用 A* 算法!
在了解 A* 算法的算法流程之前,先要知道两个列表:开启列表和关闭列表。开启列表其实就是一个等待检查的方块的列表,关闭列表是不需要检查的方块的列表。
好了,我们来看看 A* 算法的执行流程。
-
从起点 A 开始,把它作为待处理的方块,并存到开启列表中。
-
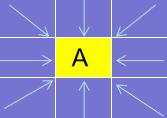
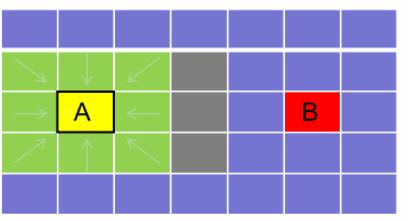
寻找起点 A 周围可以到达的方块,把这些地点存到开启列表中,并将它们的父方块设置成 A 。如下图所示(箭头指向方块的“父亲”):
-
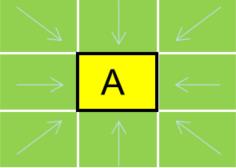
从开启列表中删除 A ,并将 A 加到关闭列表。如下图所示(方块变成绿色表示方块在开启列表中,黑色描边表示方块在关闭列表中):
-
从开启列表中找出最好的方块作为下一步要走到的位置。
那么什么样的才是最好的呢?我们可以通过公式: F = G + H F=G+H F=G+H 来计算。其中 G G G表示从起点 A A A 移动到指定方块的代价(可以斜着移动)。 H H H表示从指定的方块移动到终点 B B B 的预计代价(在这里假定只可以上下左右四个方向移动)。
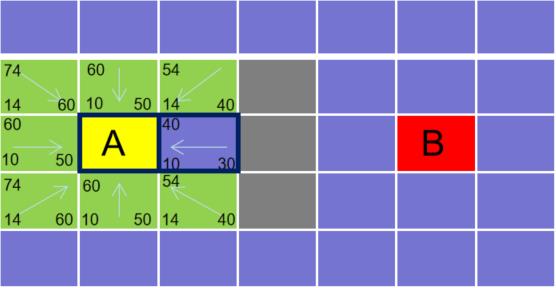
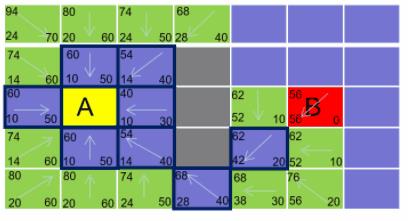
看上去有点懵?不如来看个例子。假设横竖移动的代价为 10 ,斜着移动的代价为 14 。那么我们可以计算出起点 A 周围方块的 G,H,F 的值。如下图所示(方块的左上角的数字表示 F ,左下角表示 G ,右下角表示 H ):
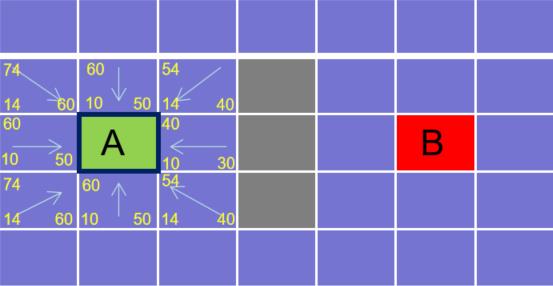
有了这些值之后,就从开启列表中选出 F F F 值最低的方块,并走过去。
- 把它从开启列表中删除,并存到关闭列表中。
-
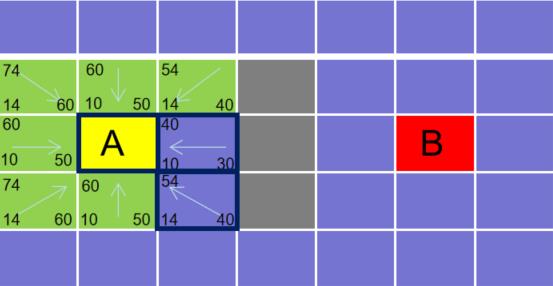
检查它所有可以到达的方块,若方块并不在开启列表中,则将其加入到开启列表,并计算它的 G,H,F 的值,并设置父方块。若方块已经存在于开启列表中(假设为方块 D ),就检查如果用新的路径到达 D 的话, G 值是否会更低一些,如果新的 G 值更低,那就把 D 的父方块改为它。如果新的 G 值更高,就什么都不做。
-
继续检查开启列表哪个方块的 F 值最小,我们发现有两个方块的 F 值为 54 ,所以可以随便选一个,比如选下面那个方块走过去。
- 将下面的 3 个方块加入到开启列表,并更新其父方块和 G,H,F 的值。
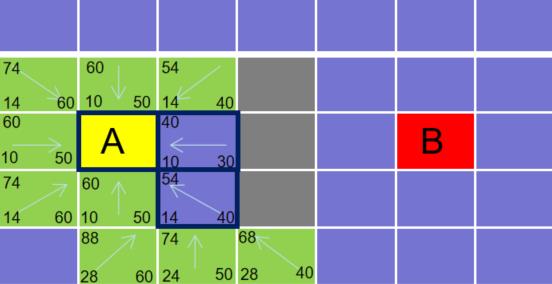
就这样, A * 算法就是从开启列表找出 F 值最小的,将它从开启列表中移除掉,并加到关闭列表中,再继续找出它周围可以到的的方块,如此循环下去。当开启列表里出现了终点的时候,说明最优路径已经找到了。整个过程如下图所示:
你以为这就完了?不,还差最后一步,就是获取路径。获取路径的思想很简答,由于我们的方块都有父方快,所以我们从终点 B 开始,沿着父方块的方向走,能够回到起点 A ,而这一条路径就是从 A 到 B 的路径。
3、算法实现
节点结构:
class Node:
def __int__(self):
self.unable = False
self.distanceFromDes = -1 # 距离终点的距离
self.distanceFromOri = -1 # 距离起点的距离
self.allDistance = -1
self.added = False
self.closed = False
self.parent = None
self.x = -1
self.y = -1
map 地图节点构造如下:
def GenerateMap(m, n):
map = list()
for j in range(m):
nodeRow = list()
map.append(nodeRow)
for i in range(n):
node = Node()
node.y = j
node.x = i
node.unable = False
node.distanceFromDes = -1 # 距离终点的距离
node.distanceFromOri = -1 # 距离起点的距离
node.allDistance = -1
node.added = False
node.closed = False
node.parent = None
nodeRow.append(node)
return map
A*算法:
def A_star(map, mapSize, start, end):
'''
A*算法,从start走到end
:param map:地图
:param mapSize:地图大小,例如[10,10]表示地图长10宽10
:param start:表示出发地,类型为列表,如[1,2]表示出发地为地图中的第1行第2列的方块
:param end:表示目的地,类型为列表,如[1,2]表示目的地为地图中的第1行第2列的方块
:return:从出发地到目的地的路径
'''
# 构造开启列表,开启列表为openedList
openedList = []
# 获得出发地方块的信息,并将信息保存为node变量,map表示地图节点,start表示出发地
node = map[start[0]][start[1]]
# 将起点的G和F设置成0,H已经设置过了
node.distanceFromOri = 0 # 距离起点的距离
node.allDistance = 0
# 将当前方块存到开启列表中
openedList.append(node)
node.added = True
# 循环检查开启列表
while len(openedList) != 0:
# 将开启列表中第一个方块删除
node = openedList.pop(0)
# 方块的closed状态设置成True,相当于加入到关闭列表
node.closed = True
# 如果走到了终点就获取路径
if node.y == end[0] and node.x == end[1]:
finalListNeedReverse = [] #从终点到起点的路径
while node != None:
finalListNeedReverse.append(node)
node = node.parent #获取父方块
finalListNeedReverse.reverse()
return finalListNeedReverse
# neighboursList存放的是当前方块周围的方块
neighboursList = []
y = node.y #初始值-1
x = node.x #初始值-1
parentDistanceFromOri = node.distanceFromOri # 距离起点的距离
for needNodey in (y + 1, y, y - 1):
if needNodey < 0 or needNodey >= mapSize[0]:
continue
for needNodex in (x + 1, x, x - 1):
if needNodex < 0 or needNodex >= mapSize[1]:
continue
#当前方块的信息
needNode = map[needNodey][needNodex]
# 不考虑不可达、在关闭列表中以及已经在开启列表中的方块
if needNode.unable == True or needNode.closed == True or needNode.added == True:
continue
yOffset = needNodey - y
xOffset = needNodex - x
allOffset = yOffset + xOffset
# 计算可达并没有被添加到开启列表中的方块的G值
if allOffset == 1 or allOffset == -1: #此刻为横竖移动
distanceFromOri = parentDistanceFromOri + 1
else:
distanceFromOri = parentDistanceFromOri + 1.4
# 更新最小的G值
if needNode in neighboursList:
# 若新的G值比老的G值低,则更新成老的G值
if distanceFromOri < needNode.distanceFromOri:
needNode.distanceFromOri = distanceFromOri
else:
needNode.distanceFromOri = distanceFromOri
neighboursList.append(needNode)
# 设置neighboursList中的方块的父方块,F值等
for needNode in neighboursList:
needNode.parent = node
# 更新F值
needNode.allDistance = needNode.distanceFromOri + needNode.distanceFromDes
needNode.added = True
openedList.append(needNode)
# 将方块根据F值从小到大排序,这样每次只要获取列表中的一个方块就能得到F值最小的方块
openedList.sort(key=lambda x: x.allDistance)
return None
测试算法:
测试输入:
{‘map_size’:[10, 10], ‘start’:[1, 2], ‘end’:[6, 7], ‘obstacleList’:[[1, 1], [2, 1], [3, 1], [4, 3], [1, 3], [2, 3], [3, 3], [0, 1], [5, 1], [5, 3]]}
预期输出:
start->(1,4)->(2,5)->(3,6)->(4,7)->(5,8)->(6,8)->end
def SetUnableMapNode(map, ls=()): # 要求一个坐标队列,里边的点上的Node的unable == True
for index in ls:
map[index[0]][index[1]].unable = True
return map
def GetDistanceFromDes(map, mapSize, desIndex): # map二维数组,mapsize(m,n),desIndex终点坐标
for ls in map:
for node in ls:
node.added = False
desNode = map[desIndex[0]][desIndex[1]]
desNode.distanceFromDes = 0
addedList = list() # 已经加入的队列,已有值distanceFromDes
needList = list() # 待加入的队列,需要评估值distanceFromDes
addedList.append(desNode)
desNode.added = True
while (len(addedList) != 0): # 当地图上所有可以遍历的点还没全确定
while (len(addedList) != 0): # 当一个大循环中,addedList还没被needList取代
# 从addedList中选出来的一个点,找needList中的needNode
mainNode = addedList.pop(0)
mainDistanceFromDes = mainNode.distanceFromDes
y = mainNode.y
x = mainNode.x
for needNodey in (y + 1, y, y - 1):
if needNodey < 0 or needNodey >= mapSize[0]:
continue
for needNodex in (x + 1, x, x - 1):
if needNodex < 0 or needNodex >= mapSize[1]:
continue
needNode = map[needNodey][needNodex] # 坐标不出界
if needNode.unable == True or needNode.added == True:
continue # 坐标也满足add的要求
yOffset = needNodey - y
xOffset = needNodex - x
allOffset = yOffset + xOffset
if allOffset == 1 or allOffset == -1:
distanceFromDes = mainDistanceFromDes + 1
else:
distanceFromDes = mainDistanceFromDes + 1.4
if needNode in needList: # 设置needNode的距离,要求最小
if distanceFromDes < needNode.distanceFromDes:
needNode.distanceFromDes = distanceFromDes
else: # needNode 不在needList中 distanceFromDes一定是-1
needNode.distanceFromDes = distanceFromDes
needList.append(needNode)
# print(needNode.y,needNode.x,needNode.distanceFromDes)
# needList 已满 addedList已空
addedList = needList
for node in addedList:
node.added = True
needList = list()
return map
def TestGetMinDistanceNodeList(map, mapSize, oriIndex, desIndex):
finalList = A_star(map, mapSize, oriIndex, desIndex) # 添加起点,并生成起点到终点的节点队列
print('start->', end='')
for i in range(1, len(finalList)-1):
print('(%d,%d)->' % (finalList[i].y+1, finalList[i].x+1), end='')
print('end')
if __name__ == '__main__':
data = eval(input())
m = data['map_size'][0] # 设置地图的长
n = data['map_size'][1] # 设置地图的宽
oriIndex = data['start'] # 设置起点坐标
desIndex = data['end'] # 设置终点坐标
map = GenerateMap(m, n) # 生成地图节点
obstacleList = data['obstacleList'] # 设置障碍
map = SetUnableMapNode(map, obstacleList) # 在地图中添加障碍
GetDistanceFromDes(map, (m, n), desIndex) # 添加终点,并计算节点与终点的距离
for ls in map:
for node in ls:
node.added = False
TestGetMinDistanceNodeList(map, (m, n), oriIndex, desIndex)
以上是关于第三:启发式搜索:A* 算法的主要内容,如果未能解决你的问题,请参考以下文章