2021深圳杯A题思路 火星探测器着陆控制方案
Posted 数模实验室-教你学建模
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了2021深圳杯A题思路 火星探测器着陆控制方案相关的知识,希望对你有一定的参考价值。
A题 火星探测器着陆控制方案
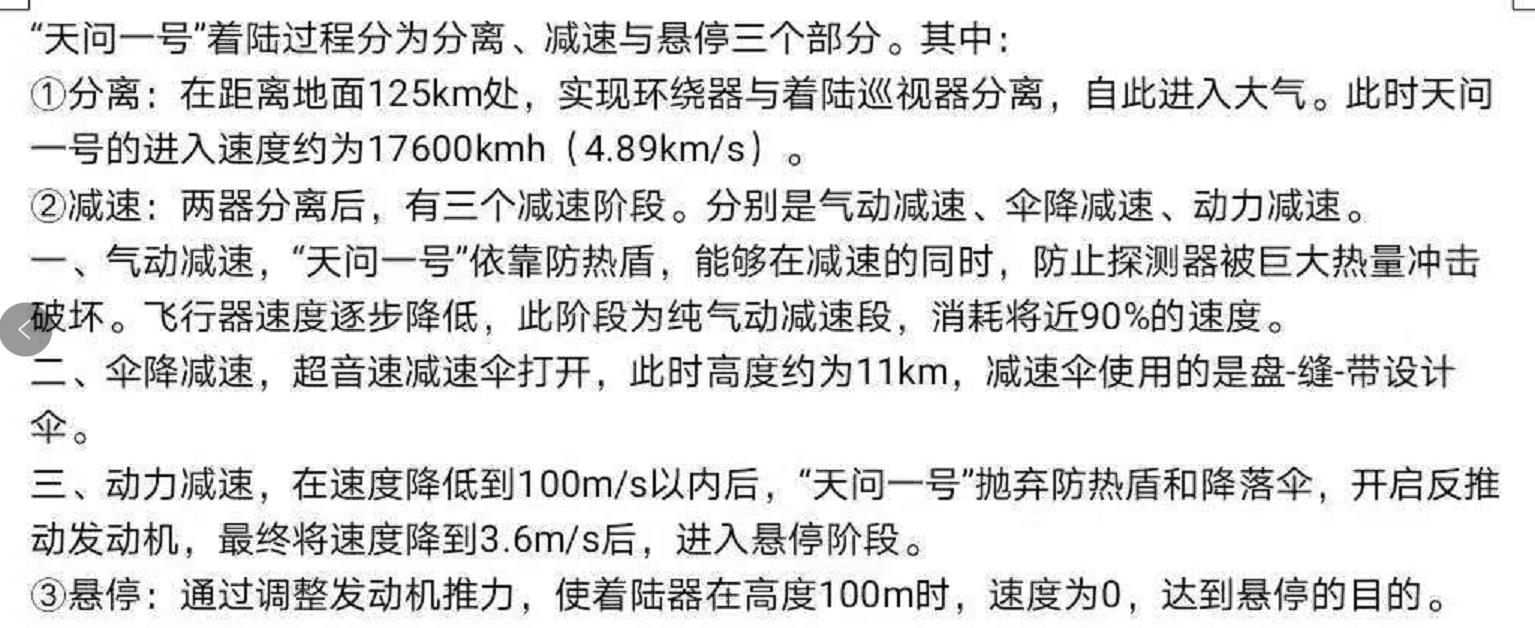
本题聚焦于探测器从火星同步轨道出发到探测器在火星地表上方悬停的过程(以下简称着陆过程),要求参赛队收集有关天问一号探测器的音像和文字等公开资料,建立数学模型,研究如下问题:
-
确定探测器着陆过程时间最短的操控方案(包括环绕器与着陆巡视器分离、阻尼伞打开、发动机系统点火等时间,以及发动机系统运行方案);
-
对给定的着陆过程时间,确定消耗能量最少的操控方案;
-
如果希望探测器着陆过程与公开的音像和文字资料尽量一致,如何设计操控方案。
天问一号数据


思路
2021深圳杯A题 详细思路
超详细思路
从 探测器飞离地球到达目标火星 4个阶段入手
即:
-
停泊分离段
-
过渡轨道段
-
动力下降段
-
最终着陆段
建立相应数学模型,并分析
PS:使用学长的思路可以节省很多时间,但不要完全依赖,祝大家比赛顺利
这题第二问需要用到蚁群优化,这里给个简单的蚁群demo
from mpl_toolkits.mplot3d import proj3d
from mpl_toolkits.mplot3d import Axes3D
import numpy as np
height3d = np.array([[2000,1400,800,650,500,750,1000,950,900,800,700,900,1100,1050,1000,1150,1300,1250,1200,1350,1500], [1100,900,700,625,550,825,1100,1150,1200,925,650,750,850,950,1050,1175,1300,1350,1400,1425,1450], [200,400,600,600,600,900,1200,1350,1500,1050,600,600,600,850,1100,1200,1300,1450,1600,1500,1400], [450,500,550,575,600,725,850,875,900,750,600,600,600,725,850,900,950,1150,1350,1400,1450], [700,600,500,550,600,550,500,400,300,450,600,600,600,600,600,600,600,850,1100,1300,1500], [500,525,550,575,600,575,550,450,350,475,600,650,700,650,600,600,600,725,850,1150,1450], [300,450,600,600,600,600,600,500,400,500,600,700,800,700,600,600,600,600,600,1000,1400], [550,525,500,550,600,875,1150,900,650,725,800,700,600,875,1150,1175,1200,975,750,875,1000], [800,600,400,500,600,1150,1700,1300,900,950,1000,700,400,1050,1700,1750,1800,1350,900,750,600], [650,600,550,625,700,1175,1650,1275,900,1100,1300,1275,1250,1475,1700,1525,1350,1200,1050,950,850], [500,600,700,750,800,1200,1600,1250,900,1250,1600,1850,2100,1900,1700,1300,900,1050,1200,1150,1100], [400,375,350,600,850,1200,1550,1250,950,1225,1500,1750,2000,1950,1900,1475,1050,975,900,1175,1450], [300,150,0,450,900,1200,1500,1250,1000,1200,1400,1650,1900,2000,2100,1650,1200,900,600,1200,1800], [600,575,550,750,950,1275,1600,1450,1300,1300,1300,1525,1750,1625,1500,1450,1400,1125,850,1200,1550], [900,1000,1100,1050,1000,1350,1700,1650,1600,1400,1200,1400,1600,1250,900,1250,1600,1350,1100,1200,1300], [750,850,950,900,850,1000,1150,1175,1200,1300,1400,1325,1250,1125,1000,1150,1300,1075,850,975,1100], [600,700,800,750,700,650,600,700,800,1200,1600,1250,900,1000,1100,1050,1000,800,600,750,900], [750,775,800,725,650,700,750,775,800,1000,1200,1025,850,975,1100,950,800,900,1000,1050,1100], [900,850,800,700,600,750,900,850,800,800,800,800,800,950,1100,850,600,1000,1400,1350,1300], [750,800,850,850,850,850,850,825,800,750,700,775,850,1000,1150,875,600,925,1250,1100,950], [600,750,900,1000,1100,950,800,800,800,700,600,750,900,1050,1200,900,600,850,1100,850,600]])
fig = figure()
ax = Axes3D(fig)
X = np.arange(21)
Y = np.arange(21)
X, Y = np.meshgrid(X, Y)
Z = -20*np.exp(-0.2*np.sqrt(np.sqrt(((X-10)**2+(Y-10)**2)/2)))+20+np.e-np.exp((np.cos(2*np.pi*X)+np.sin(2*np.pi*Y))/2)
ax.plot_surface(X, Y, Z, rstride=1, cstride=1, cmap='cool')
ax.set_xlabel('X axis')
ax.set_ylabel('Y axis')
ax.set_zlabel('Z')
ax.set_title('3D map')
point0 = [0,9,Z[0][9]]
point1 = [20,7,Z[20][7]]
ax.plot([point0[0]],[point0[1]],[point0[2]],'r',marker = u'o',markersize = 15)
ax.plot([point1[0]],[point1[1]],[point1[2]],'r',marker = u'o',markersize = 15)
x0,y0,_ = proj3d.proj_transform(point0[0],point0[1],point0[2], ax.get_proj())
x1,y1,_ = proj3d.proj_transform(point1[0],point1[1],point1[2], ax.get_proj())
label = pylab.annotate(
"start",
xy = (x0, y0), xytext = (-20, 20),
textcoords = 'offset points', ha = 'right', va = 'bottom',
bbox = dict(boxstyle = 'round,pad=0.5', fc = 'yellow', alpha = 1),
arrowprops = dict(arrowstyle = '->', connectionstyle = 'arc3,rad=0'),fontsize=15)
label2 = pylab.annotate(
"end",
xy = (x1, y1), xytext = (-20, 20),
textcoords = 'offset points', ha = 'right', va = 'bottom',
bbox = dict(boxstyle = 'round,pad=0.5', fc = 'yellow', alpha = 1),
arrowprops = dict(arrowstyle = '->', connectionstyle = 'arc3,rad=0'),fontsize=15)
def update_position(e):
x2, y2, _ = proj3d.proj_transform(point0[0],point0[1],point0[2],ax.get_proj())
label.xy = x2,y2
label.update_positions(fig.canvas.renderer)
x1,y1,_ = proj3d.proj_transform(point1[0],point1[1],point1[2],ax.get_proj())
label2.xy = x1,y1
label2.update_positions(fig.canvas.renderer)
fig.canvas.draw()
fig.canvas.mpl_connect('button_release_event', update_position)
思路获取
关注下方公众号,回复 深圳杯
获取思路

以上是关于2021深圳杯A题思路 火星探测器着陆控制方案的主要内容,如果未能解决你的问题,请参考以下文章