MATLAB点云处理:点云法向量估计
Posted 没事就要敲代码
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了MATLAB点云处理:点云法向量估计相关的知识,希望对你有一定的参考价值。
1 法向量估计函数 pcnormals
pcnormals 函数用于点云法向量估计,MATLAB提供了两种重载方式
normals = pcnormals(ptCloud)
返回一个矩阵,该矩阵的元素对应为输入点云ptCloud中的每个点的法线。该函数使用六个相邻点拟合局部平面来确定每个法向量。
normals = pcnormals(ptCloud,k)
指定用于局部平面拟合的点数k,若不指定,则默认 k = 6
2 代码实现
代码:
clc;
clear;
% 加载点云
ptCloud_in = pcread('bunny.pcd');
% 法向量估计
normals = pcnormals(ptCloud_in);
% 可视化
figure;
pcshow(ptCloud_in.Location,[0.3,0.3,0.7]);
title('法向量估计');
xlabel('X(m)');
ylabel('Y(m)');
zlabel('Z(m)');
hold on
% 所绘制的法向量间隔
setp = 10;
% 法向量位置(x,y,z)
x = ptCloud_in.Location(1:setp:end,1);
y = ptCloud_in.Location(1:setp:end,2);
z = ptCloud_in.Location(1:setp:end,3);
% 法向量(u,v,w)
u = normals(1:setp:end,1);
v = normals(1:setp:end,2);
w = normals(1:setp:end,3);
% 在由(x,y,z)确定的点上,用分量(u,v,w)确定的方向绘制法向量。矩阵x、y、z、u、v和w的大小必须相同,并且包含相应的位置和法向量分量。
quiver3(x,y,z,u,v,w);
hold on
结果展示:
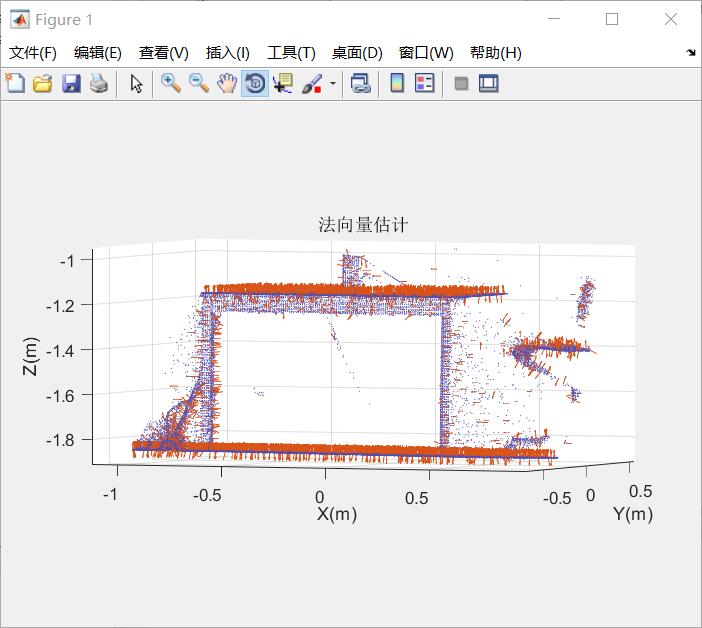
到这,已经初步实现了点云法向量的估计。通常情况下,点云法向量的正负是不确定的,即法向量方向具有二义性。
可以指定传感器中心 ( x 0 , y 0 , z 0 ) (x_0,y_0,z_0) (x0,y0,z0),将所有法向量都指向该点所在的方位(仅用于确定表面法线向内还是向外),实现法线一致性定向。
在上面的代码后加上下面的代码即可实现法线一致性定向
% 调整法向量方向,使其指向传感器中心
sensorCenter = [-0.1,1.1,0.2]; % 传感器中心坐标
for k = 1 : numel(x)
p1 = sensorCenter - [x(k),y(k),z(k)];
p2 = [u(k),v(k),w(k)];
% Flip the normal vector if it is not pointing towards the sensor.
angle = atan2(norm(cross(p1,p2)),p1*p2');
if angle > pi/2 || angle < -pi/2
u(k) = -u(k);
v(k) = -v(k);
w(k) = -w(k);
end
end
% 显示一致性定向后的法向量
figure
pcshow(ptCloud_in.Location,[0.5,0.7,0.2]);
title('法线一致性定向');
xlabel('X(m)');
ylabel('Y(m)');
zlabel('Z(m)');
hold on
quiver3(x, y, z, u, v, w);
hold off
法线一致性定向结果展示:
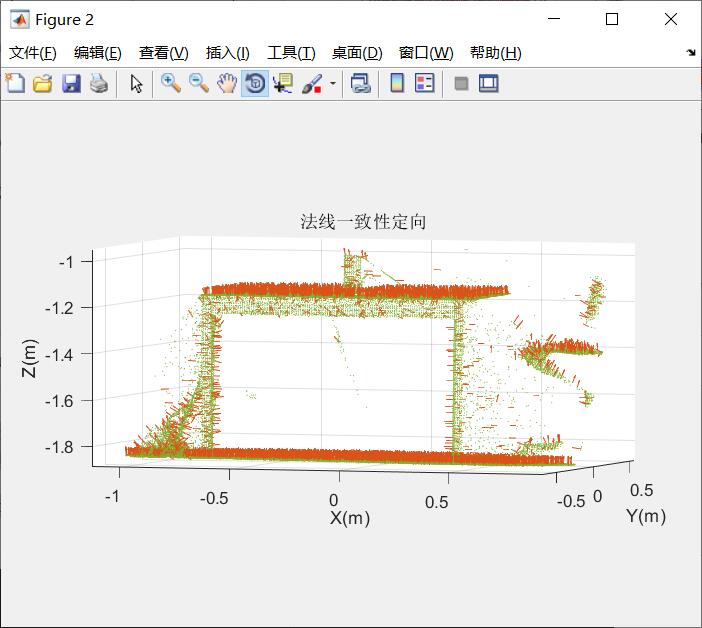
对比定向前后的结果可以发现,法线方向发生改变,尤其在平面区域更加明显。
3 参考链接
以上是关于MATLAB点云处理:点云法向量估计的主要内容,如果未能解决你的问题,请参考以下文章