Pytorch Note28 Pytorch的卷积模块
Posted Real&Love
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了Pytorch Note28 Pytorch的卷积模块相关的知识,希望对你有一定的参考价值。
Pytorch Note28 Pytorch的卷积模块
全部笔记的汇总贴: Pytorch Note 快乐星球
卷积网络在计算机视觉领域被应用得非常广泛,那么常见的卷机网络中用到的模块能够使用 pytorch 非常轻松地实现,下面我们来讲一下 pytorch 中的卷积模块
卷积层
卷积在 pytorch 中有两种方式,一种是 torch.nn.Conv2d(),一种是 torch.nn.functional.conv2d(),这两种形式本质都是使用一个卷积操作
nn.Conv2d(in_channels, out_channels, kernel_size, stride=1,padding=0, dilation=1, groups=1, bias=True)就是PyTorch中的卷积模块了,里面常用的参数有5个,分别是 in_channels,out_channels,kernel_size,stride,padding,除此之外还有参数dilation,groups,bias。下面来具体解释每个参数的含义
- in_channels:对应的是输入数据体的深度;
- out_channels:对应的是输出数据体的深度;
- kernel_size:表示滤波器的大小,可以使用一个数字来表示高和宽相同的卷积核,比如kernel_size=3,也可以使用不同的数字来表示高和宽不同的卷积核,比如kernel_size=(3, 2);
- stride:表示滑动的步长;
- padding=0:表示四周不进行零填充,padding=1表示四周进行1个像素点的填充;
- bias:一个布尔值,默认bias=True,表示使用偏置;
- groups:表示输出数据体深度上和输入数据体深度上的联系,默认groups=1,也就是所有的输出和每一个输入都是相关联的,groups>1说明将输入和输出的深度分别分为 groups组各自进行卷积将得到的输出拼接(组卷积);
- dilation:表示卷积对于输入数据体的空间间隔,默认dilation=1;(空洞卷积)
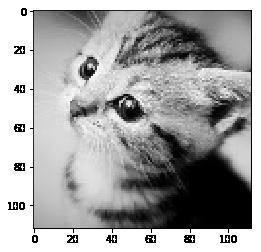
im = Image.open('./cat.png').convert('L') # 读入一张灰度图的图片
im = np.array(im, dtype='float32') # 将其转换为一个矩阵
# 可视化图片
plt.imshow(im.astype('uint8'), cmap='gray')

# 将图片矩阵转化为 pytorch tensor,并适配卷积输入的要求
im = torch.from_numpy(im.reshape((1, 1, im.shape[0], im.shape[1])))
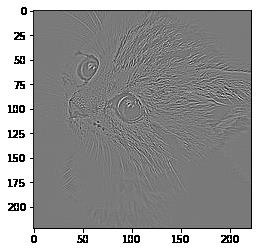
下面我们定义一个算子对其进行轮廓检测
# 使用 nn.Conv2d
conv1 = nn.Conv2d(1, 1, 3, bias=False) # 定义卷积
sobel_kernel = np.array([[-1, -1, -1], [-1, 8, -1], [-1, -1, -1]], dtype='float32') # 定义轮廓检测算子
sobel_kernel = sobel_kernel.reshape((1, 1, 3, 3)) # 适配卷积的输入输出
conv1.weight.data = torch.from_numpy(sobel_kernel) # 给卷积的 kernel 赋值
edge1 = conv1(Variable(im)) # 作用在图片上
edge1 = edge1.data.squeeze().numpy() # 将输出转换为图片的格式
下面我们可视化边缘检测之后的结果
plt.imshow(edge1, cmap='gray')
池化层
卷积网络中另外一个非常重要的结构就是池化,这是利用了图片的下采样不变性,即一张图片变小了还是能够看出了这张图片的内容,而使用池化层能够将图片大小降低,非常好地提高了计算效率,同时池化层也没有参数。池化的方式有很多种,比如最大值池化,均值池化等等,在卷积网络中一般使用最大值池化。
在 pytorch 中最大值池化的方式也有两种,一种是 nn.MaxPool2d(),一种是 torch.nn.functional.max_pool2d(),他们对于图片的输入要求跟卷积对于图片的输入要求是一样的
其中的参数有kernel_size、stride、padding、dilation、return_indices、ceil_mode,下面来具体解释一下它们各自的含义:
-
kernel_size、stride、padding、dilation之前的卷积层已经介绍过了,是相同的含义;
-
return_indices:表示是否返回最大值所处的下标,默认return_indices=False;
-
ceil_mode:表示使用一些方格代替层结构,默认ceil_mode=False,一般都不会设置这些参数;
-
nn.AvgPool2d:表示均值池化,里面的参数和 nn.MaxPool2d类似,但多一个参数count_include_pad,这个参数表示计算均值的时
是否包括零填充,默认count_include_pad=True;
# 使用 nn.MaxPool2d
pool1 = nn.MaxPool2d(2, 2)
print('before max pool, image shape: {} x {}'.format(im.shape[2], im.shape[3]))
small_im1 = pool1(Variable(im))
small_im1 = small_im1.data.squeeze().numpy()
print('after max pool, image shape: {} x {} '.format(small_im1.shape[0], small_im1.shape[1]))
before max pool, image shape: 224 x 224
after max pool, image shape: 112 x 112
可以看到图片的大小减小了一半,那么图片是不是变了呢?我们可以可视化一下
plt.imshow(small_im1, cmap='gray')
以上是关于Pytorch Note28 Pytorch的卷积模块的主要内容,如果未能解决你的问题,请参考以下文章