在Costmap_2d里面插入Prohibition_layer(禁止区域层)
Posted dxmcu
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了在Costmap_2d里面插入Prohibition_layer(禁止区域层)相关的知识,希望对你有一定的参考价值。
在Costmap_2d里面插入Prohibition_layer(禁止区域层)
简介
costmap_2d在navigaition里面是一个很重要的板块,通常默认的是三层地图(静态/障碍/膨胀层)叠加在一起,构成整个完整的代价地图,但是我们也可以插入一些自定义的图层,然后实现自己定制化的功能,基础的教程大家可以参考costmap_2d中插入自定义层。本文的主要目的是来告诉大家如何在代价地图中插入Prohibition_layer(禁止层),然后在已经建好的地图中设立禁止通行区域,关于prohibition_layer具体的作用大家可以参照roswiki上的解释。
具体实现步骤
1 代码下载与编译
之前我们学习插入simple_layer的时候是在自己的工作空间(catkin_ws)中建立一个pakage,然后再去自己创建.cpp文件和.h头文件,再去改cmakelist,添加.xml文件,在这个教程中我们不需要这么麻烦,我们可以直接在github上把prohibition_layer的包下载下来(源码下载地址戳这里).,解压后放在自己的工作空间中的 src 文件夹里面,然后在终端输入:
$ cd catkin_ws("catkin_ws"替换成你的工作空间名称)
$ catkin_make
编译完成以后在终端中输入:
rospack plugins --attrib=plugin costmap_2d
当你发现终端中输出:

这就表明prohibition_layer已经是一个可供使用的地图插件了.
2 在代价地图中插入prohibition_layer
完成步骤1后说明prohibition_layer已经可以供costmap使用了,现在我们要做的就是把prohibition_layer插入到costmap中去.
我们在自己的代价地图参数配置文件夹中找到 global_costmap_params.yaml 和 local_costmap_params.yaml ,打开这两个文档,分别在两个文档的末尾做修改,修改后应该是下面的内容:
plugins:
- {name: static_map, type: "costmap_2d::StaticLayer"}
- {name: obstacles, type: "costmap_2d::VoxelLayer"}
- {name: costmap_prohibition_layer, type: "costmap_prohibition_layer_namespace::CostmapProhibitionLayer"}
- {name: inflation_layer, type: "costmap_2d::InflationLayer"}
3 修改launch文件
完成插入地图后我们还需要修改自己的launch文件,我是在自己的move_base.launch 中插入的,这个大家根据自己的需求,你用的carlike就修改carlike的launch文件.打开自己的launch文件中插入如下内容:
<rosparam file="$(find turtlebot3_navigation)/param/prohibition_areas.yaml" command="load" ns="global_costmap/costmap_prohibition_layer" />
<rosparam file="$(find turtlebot3_navigation)/param/prohibition_areas.yaml" command="load" ns="local_costmap/costmap_prohibition_layer" />
1
2
其中的"turtlebot3_navigation"需要根据自己的情况修改,你打开自己的launch文件对照上下文就知道怎么更改了.
4 设置禁止区域坐标参数
完成以上步骤所有的配置工作就剩下最后一步了,设置禁止区域坐标参数.
首先需要在参数配置文件夹(就是和 global_costmap_params.yaml 以及 local_costmap_params.yaml 相同位置的文件夹)中创建新的文档,命名为 "prohibition_areas.yaml".
然后在prohibition_areas.yaml文档中输入:
prohibition_areas:
#定义一个禁止点
- [17.09, -6.388]
# 定义一个禁止通行的线
- [[8.33, 2.11],
[8.26, 5.11]]
# 定义一个禁止通行的区域
- [[-11.15, -15.614],
[-12.35, -13.89],
[-10.05, -12.218]]
注意事项:
1 一定要严格按照上述格式来设置坐标,我之前遇到的格式错误导致不能识别禁止区域坐标情形有
(1):坐标前的短横线没对齐
(2):定义禁止区域或者禁止线,两坐标之间缺少了逗号
2 你可以同时定义多个禁止点/多个禁止线/多个禁止区域,或者混合定义多个点/线/区域.
3 禁止区域的坐标如何设置就需要你根据自己建的图来测量,这里就不赘述了.
5 结语
完成以上所有内容,你再次打开自己的导航就能够在rviz中看到自己的设置的禁止区域了,这里贴出我之前做的结果:
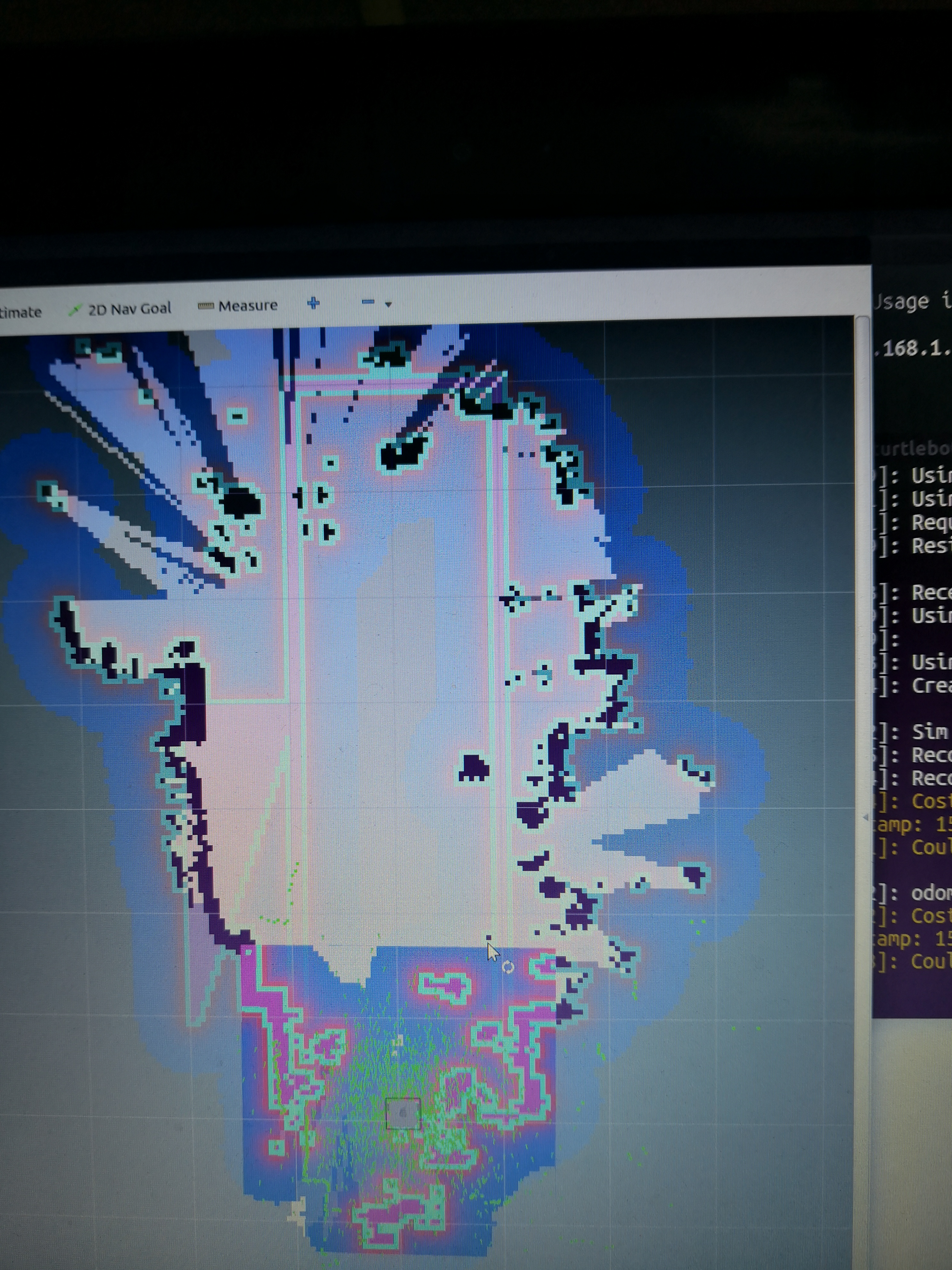
这是我在实验室里面建立的地图,图中的红色三角形是我设立的禁止区域,矩形框是我画的四条禁止线,小车现在在矩形框内,当我把导航目标设置在矩形框外的时候,结果显示的是无法规划路线的.
以上是关于在Costmap_2d里面插入Prohibition_layer(禁止区域层)的主要内容,如果未能解决你的问题,请参考以下文章