MSP430F5529双芯片串口通信方案
Posted AIplusX
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了MSP430F5529双芯片串口通信方案相关的知识,希望对你有一定的参考价值。
主要内容
主要内容在我的古月居博客:
MSP430F5529双芯片串口通信方案
写在前面
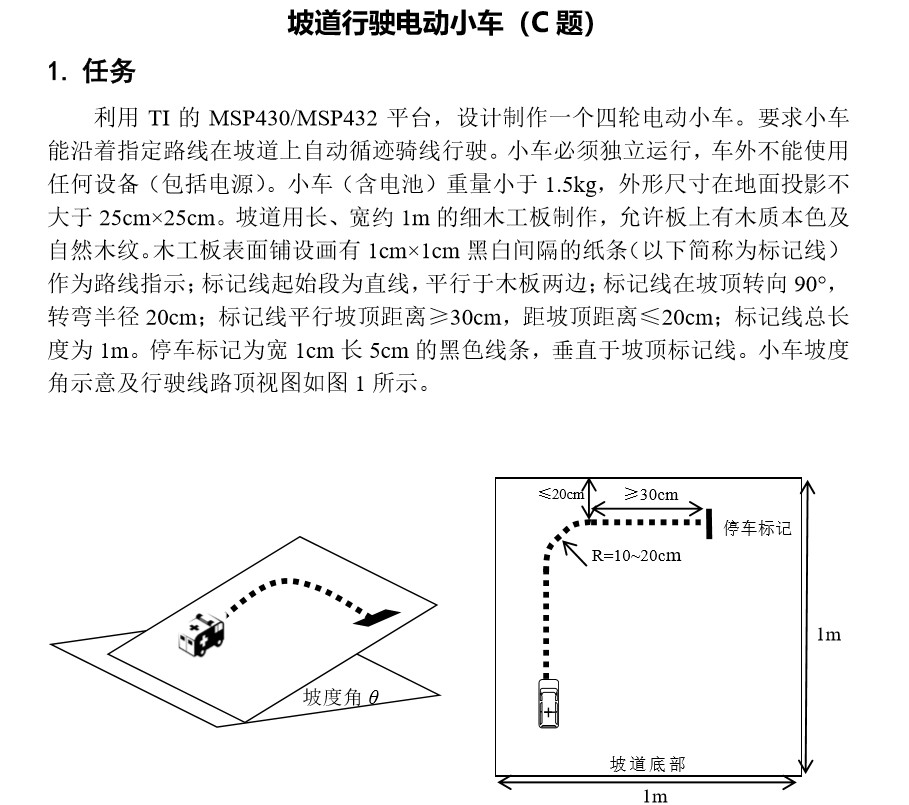
在2020年电子设计竞赛中我们要完成的任务是做一辆可循黑白间隔线的电动爬坡小车,题目如下:
因为当时我们用的MSP430F5529芯片只有4个定时器,一个产生电机PWM,一个产生舵机PWM,还有一个做定时中断使用,而后面2路的正交解码信号也需要2个定时中断进行解码,因此我使用了2块Ti芯片,芯片A进行正交解码,并且以波特率115200通过串口将数据传输给芯片B,由芯片B进行小车外设的控制,那么两块芯片之间的通信方式就非常重要了,不但要做到准确,而且延迟不能太高。
准确是因为芯片B需要利用编码器数据控制电机转速,如果编码器数据错了的话直接导致电机转飞,这是很危险的。延迟不能很高也是这个原因,通信总是会有一些时间误差,相当于现在用于电机控制的速度是上一次的反馈量,这样的误差也是比较危险的,也是有可能会导致电机转飞的。所以今天这篇博客主要将我是如何利用MSP430F5529芯片进行双芯片通信的。
PulseCnt
__interrupt void TIMER1_B0_IRQ_Handler()
{
static uint8_t led_cnt = 0;
g_left_value = TIMER_Pluse_GetValue(TIMER_A1,g_left_over_flow);
if(GPIO_ReadBit(P2,0) == 0){
g_left_value *= -1;
}
g_right_value = TIMER_Pluse_GetValue(TIMER_A0,g_right_over_flow);
if(GPIO_ReadBit(P1,7) == 1){
g_right_value *= -1;
}
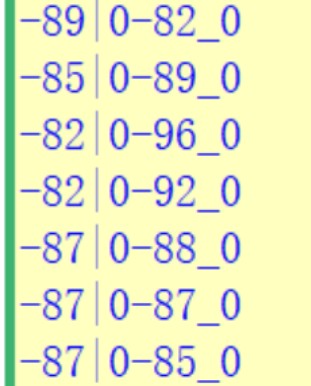
UART_Printf(UART0,"L%d:",g_left_value);
UART_Printf(UART0,"R%d;",g_right_value);
g_left_value = 0;
g_right_value = 0;
g_left_over_flow = 0; //清除溢出次数
g_right_over_flow = 0;
TIMER_Pluse_Clear(TIMER_A1);
TIMER_Pluse_Clear(TIMER_A0);
if(led_cnt ++ == 4){
led_cnt = 0;
LED_Turn(LED1);
}
}
MainCore
__interrupt void UART0_RX_IRQ_Handler()
{
static uint8_t record_L = 0;
static uint8_t record_R = 0;
if(UART_GetITStatus(UART0,UART_RX_IRQn) == TRUE) //清除串口某一个中断标志
{
uart0_data = UART_GetChar(UART0);
if(uart0_data == 'L'){
g_left_ok = 0;
}
else if(uart0_data == 'R'){
g_right_ok = 0;
}else if(uart0_data == ':'){
g_left_pulese_array[record_L] = '_';
record_L = 0;
g_left_ok = 1;
}else if(uart0_data == ';'){
g_right_pulese_array[record_R] = '|';
record_R = 0;
g_right_ok = 1;
}else{
if(g_left_ok == 0){
g_left_pulese_array[record_L] = uart0_data;
record_L++;
}else if(g_right_ok == 0){
g_right_pulese_array[record_R] = uart0_data;
record_R++;
}
}
UART_ClearITPendingBit(UART0,UART_RX_IRQn); //清除串口某一个中断标志
}
}
void GetPulse()
{
int left_neg = 1;
int right_neg = 1;
uint8_t left_first_0;
uint8_t right_first_0;
g_left_pulse = 0;
g_right_pulse = 0;
for(uint8_t i = 0 ; i < PULSEARRAY;i++){
if(g_right_pulese_array[i] == '0' && right_first_0 == 0){
right_first_0 = 1;
}
else if(g_right_pulese_array[i] == '-'){
right_neg = -1;
}else if(g_right_pulese_array[i] == '|'){
g_right_pulse *= right_neg;
break;
}else{
g_right_pulse = g_right_pulse * 10 + (g_right_pulese_array[i] - '0');
}
}
for(uint8_t i = 0 ; i < PULSEARRAY;i++){
if(g_left_pulese_array[i] == '0' && left_first_0 == 0){
left_first_0 == 1;
}
else if(g_left_pulese_array[i] == '-'){
left_neg = -1;
}else if(g_left_pulese_array[i] == '_'){
g_left_pulse *= left_neg;
break;
}else{
g_left_pulse = g_left_pulse * 10 + (g_left_pulese_array[i] - '0');
}
}
if(encoder_integral == 1 || encoder_integral == 3){
encoder_sum += (g_left_pulse + g_right_pulse) / 2;
}
for(uint8_t i = 0 ; i < PULSEARRAY;i++){
g_right_pulese_array[i] = '0';
}
for(uint8_t i = 0 ; i < PULSEARRAY;i++){
g_left_pulese_array[i] = '0';
}
}
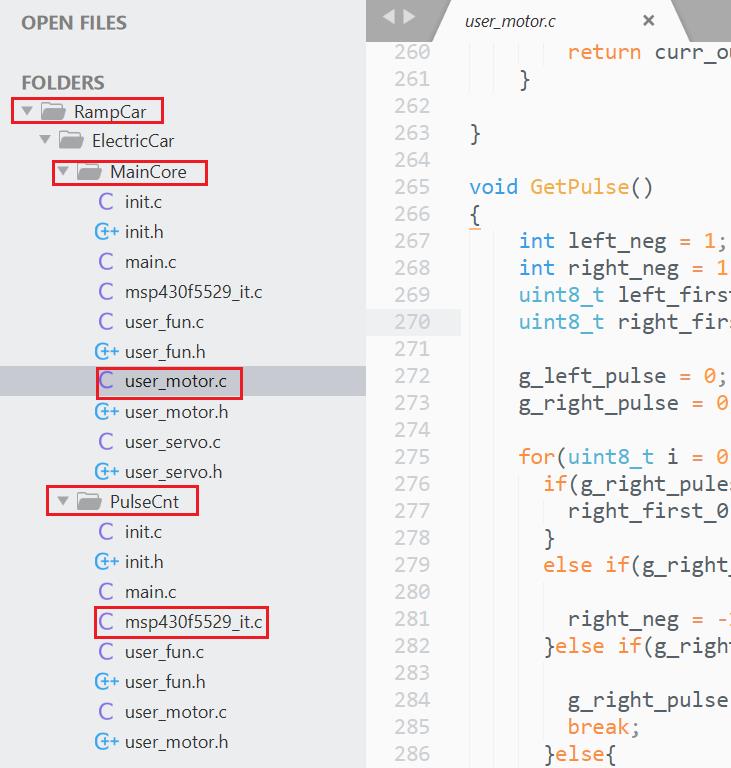
以上这段程序在我的公众号AIplusX里面的程序资料的RampCar文件夹里,具体位置看这个:
主要内容
主要内容在我的古月居博客:
MSP430F5529双芯片串口通信方案

以上是关于MSP430F5529双芯片串口通信方案的主要内容,如果未能解决你的问题,请参考以下文章