机械手爪部位触觉感应系统
Posted JeckXu666
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了机械手爪部位触觉感应系统相关的知识,希望对你有一定的参考价值。
文章目录
机械手爪部位触觉感应系统
一、项目设计目标
根据关节式机械手的手爪部位来设计触觉传感模块,通过触觉传感信号反馈控制手爪关节处的步进电机运动,使手爪能可靠牢固抓取物体又不损伤物体,并可进行接触力的阈值设定和超阈值报警提示,设计需要根据机械结构情况选择合适的触觉传感器,将传感器贴于机械手爪的合适位置,检测手爪与物体间的接触力,返回电信号,进行传感测量,同时设计触觉信号的传感接口电路,设计信号放大、滤波、A/D转换电路,使得信号有足够的信噪比,能够被单片机所采集,设计步进电机驱动电路、声光报警电路、及单片机核心控制器和液晶显示电路进行报警与用户交互,最终的设计性能需达到:手爪运动控制分辨率0.01mm、测力分辨率50mN、测力量程3N
机械爪图片:

二、项目整体框图
根据项目的设计目标,进行多次探讨修改,最终确定设计方案框图如下:
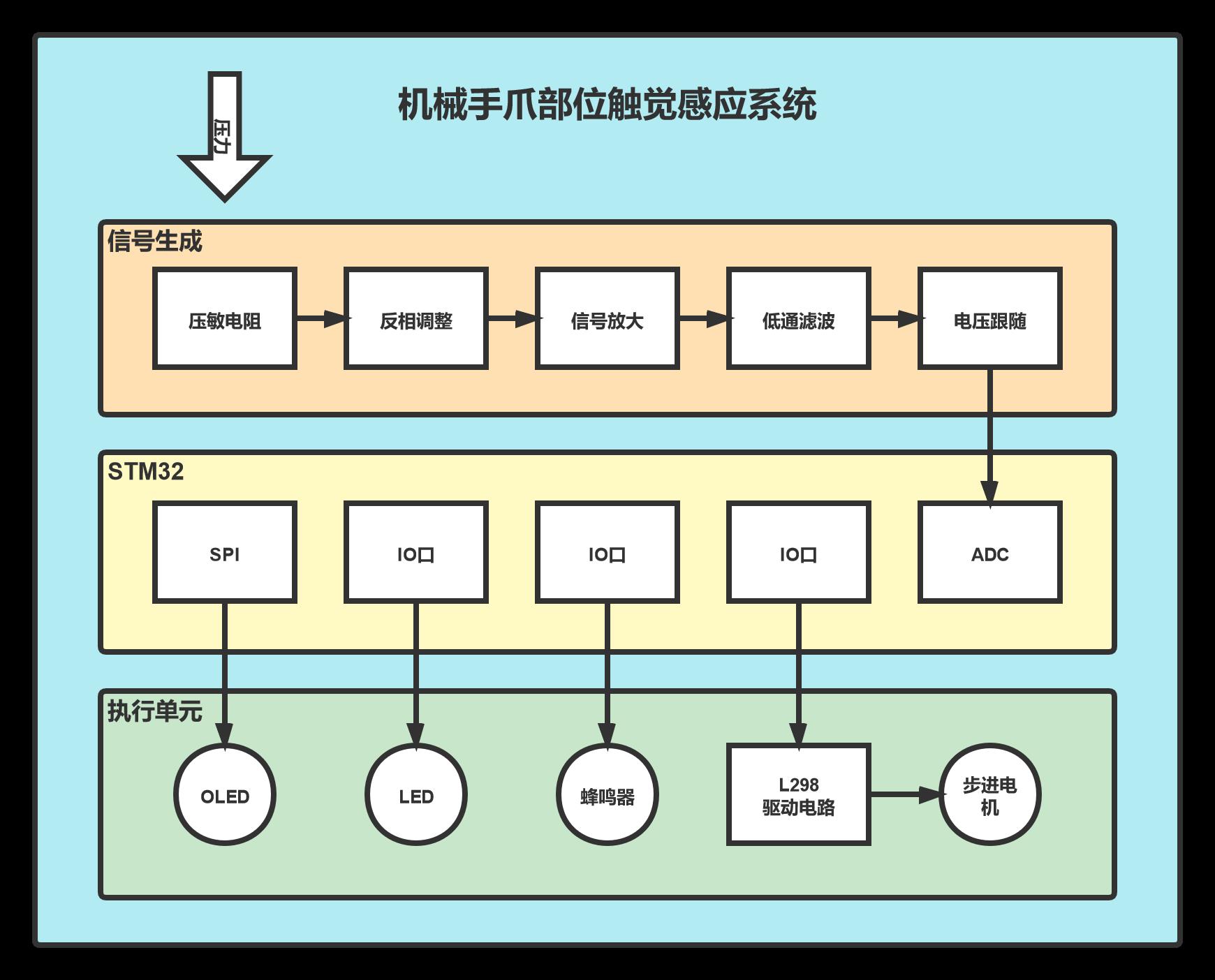
项目的整体框图主要分解为三个部分,第一部分是设计信号生成转化电路,将压力信号转化到STM32内置ADC可以采集的电压信号范围,第二部分为STM32采集压力信号进行处理,通过IO口和SPI总线向外围电路发送控制信号,第三部分驱动电路接受控制信号控制外围LED、蜂鸣器、步进电机等驱动设备
三、项目设计方案
3.1 压敏电阻信号输出方案:
-
电阻接线
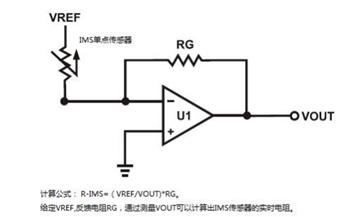
IMS 传感器作为可变电阻,可以简单的采用电阻分压的方式,通过测试电压来计算出电阻的大小,也可以通过运算放大器的运算电路来计算 IMS 传感器的实时电阻,本次设计采用如下电路:
-
曲线拟合
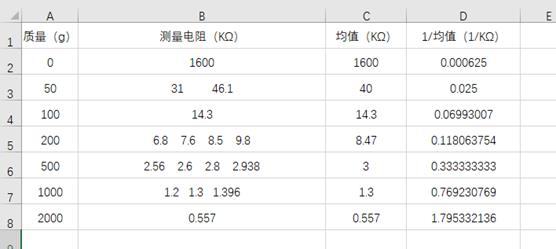
首先对电阻进行标定,测量不同压力下阻值数据:
对数据进行拟合:
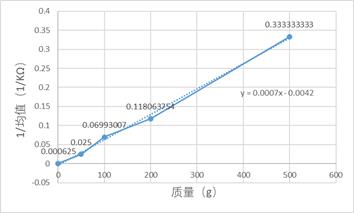
最终得出的阻值与压力的拟合公式如下:单位为 R m ( K Ω ) , m ( g ) , F ( N ) R_m(K\\mathrm{\\Omega}) ,m(g),F(N) Rm(KΩ),m(g),F(N)
R m = 1 / ( 0.0007 × m − 0.0042 ) K Ω = 1 / ( 0.0007 × ( F × 1 0 3 ) / g − 0.0042 ) K Ω R_m=1/(0.0007\\times\\ m-0.0042)\\ K\\mathrm{\\Omega}=1/(0.0007\\times(F\\times10^3)/g-0.0042)\\ K\\mathrm{\\Omega} Rm=1/(0.0007× m−0.0042) KΩ=1/(0.0007×(F×103)/g−0.0042) KΩ
-
反相调整:
增加反相电路,选取合适倍率,使电压输出关系与阻值关系呈现线性变化,便于计算,电路设计图如下:
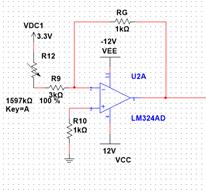
电路图输出与输入公式为: U O = − R G / ( R 1 2 + R 9 ) U I U_O=-R_G/(R_12+R_9\\ )\\ U_I UO=−RG/(R12+R9 ) UI,根据压力输入范围和反相电路公式公式,我们选取合适的电路值为: U I = 3.3 V , R 9 = 3 K Ω , R G = 1 K Ω , R 1 2 = ( 0 − 1597 ) K Ω U_I=3.3V,R_9=3KΩ,R_G=1KΩ,R_12=(0-1597 )KΩ UI=3.3V,R9=3KΩ,RG=1KΩ,R12=(0−1597)KΩ,使反相过后的电压值输出在(0 ~ -1V左右)
经过仿真测试输出结果如下:
压力量程(N) 0 3 R m ( K Ω ) R_m\\ (K\\mathrm{\\Omega}) Rm (KΩ) 1600 4.859 输出电压(V) 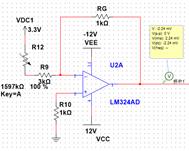
-0.00224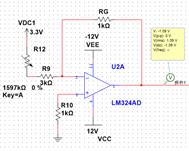
-1.09此处运算放大器用LM324AD,最小输出电压为-2.24mV,运放的低输入偏置电流为100nA,对输出影响较小,能满足要求。
3.2 放大电路方案:
-
参数设计
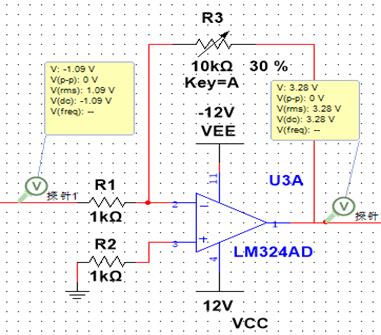
根据前面的反相电路结果,由输出电压为3.3V确定放大电路的放大倍率为3(3.3\\1.09=3.027),放大电路采用反相比例放大电路,其放大倍数为计算公式为: K f = − R 3 R 1 K_f=-\\frac{R_3}{R_1} Kf=−R1R3,故取电阻值为: R 3 = 3 K Ω , R 1 = R 2 = 1 K Ω \\ R_3=3\\ K\\mathrm{\\Omega}, R_1=R_2=1\\ K\\mathrm{\\Omega} R3=3 KΩ,R1=R2=1 KΩ
其中 R 3 \\ R_3 R3为滑动变阻器,阻值可调,改变其阻值即可改变放大倍数,用于灵活控制电压放大范围
仿真结果如下
3.3 偏置电路方案:
偏置电路采用同向加法运算电路,通过与滑动变阻器产生的电压进行加法运算,调节输入电压的偏置,其仿真电路如下:
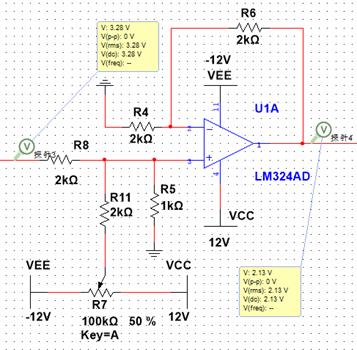
其输入与输出关系为:
U
O
=
(
1
+
R
6
R
4
)
(
R
5
/
/
R
11
R
8
+
R
5
/
/
R
11
U
I
1
+
R
5
/
/
R
8
R
11
+
R
5
/
/
R
8
U
I
2
)
U_O=\\left(1+\\frac{R_6}{R_4}\\right)\\left(\\frac{R_5//R_{11}}{R_{8+}R_5//R_{11}}U_{I1}+\\frac{R_5//R_8}{R_{11+}R_5//R_8}U_{I2}\\right)
UO=(1+R4R6)(R8+R5//R11R5//R11UI1+R11+R5//R8R5//R8UI2)
其中
U
I
1
U_{I1}
UI1为上级放大电路输出电压,
U
I
2
U_{I2}
UI2为输入的偏置电压信号,由滑动变阻器分压获得。根据计算公式和输入电压的范围,我们取:
R
8
=
2
K
Ω
,
R
4
=
2
K
Ω
,
R
6
=
2
K
Ω
,
R
11
=
2
K
Ω
,
R
5
=
1
K
Ω
R_8=2\\ K\\mathrm{\\Omega},R_4=2\\ K\\mathrm{\\Omega},R_6=2\\ K\\mathrm{\\Omega},R_{11}=2\\ K\\mathrm{\\Omega},R_5=1\\ K\\mathrm{\\Omega}
R8=2 KΩ,R4=2 KΩ,R6=2 KΩ,R11=2 KΩ,R5=1 KΩ
其中 R 7 R_7 R7为分压电阻为 ( 0 − 100 K Ω ) (0-100\\ K\\mathrm{\\Omega}) (0−100 KΩ),用于产生加法运算电路的调节电压
所以偏置电路的输入与输出的关系如下:
以上是关于机械手爪部位触觉感应系统的主要内容,如果未能解决你的问题,请参考以下文章