剑指 Offer(C++版本)系列:剑指 Offer 13 机器人的运动范围
Posted 我是管小亮
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了剑指 Offer(C++版本)系列:剑指 Offer 13 机器人的运动范围相关的知识,希望对你有一定的参考价值。
文章目录
同步GitHub在此 👉 https://github.com/TeFuirnever/GXL-Skill-Tree
- 剑指 Offer(C++版本)系列:总目录和一些提高效率的说明
- 剑指 Offer(C++版本)系列:剑指 Offer 03 数组中重复的数字
- 剑指 Offer(C++版本)系列:剑指 Offer 04 二维数组中的查找
- 剑指 Offer(C++版本)系列:剑指 Offer 05 替换空格
- 剑指 Offer(C++版本)系列:剑指 Offer 06 从尾到头打印链表
- 剑指 Offer(C++版本)系列:剑指 Offer 07 重建二叉树
- 剑指 Offer(C++版本)系列:剑指 Offer 09 用两个栈实现队列
- 剑指 Offer(C++版本)系列:剑指 Offer 10- I 斐波那契数列
- 剑指 Offer(C++版本)系列:剑指 Offer 10- II 青蛙跳台阶问题
- 剑指 Offer(C++版本)系列:剑指 Offer 11 旋转数组的最小数字
- 剑指 Offer(C++版本)系列:剑指 Offer 12 矩阵中的路径
- 剑指 Offer(C++版本)系列:剑指 Offer 13 机器人的运动范围
1、题干
机器人的运动范围
地上有一个m行n列的方格,从坐标 [0,0] 到坐标 [m-1,n-1] 。一个机器人从坐标 [0, 0] 的格子开始移动,它每次可以向左、右、上、下移动一格(不能移动到方格外),也不能进入行坐标和列坐标的数位之和大于k的格子。例如,当k为18时,机器人能够进入方格 [35, 37] ,因为3+5+3+7=18。但它不能进入方格 [35, 38],因为3+5+3+8=19。请问该机器人能够到达多少个格子?
示例 1:
输入:m = 2, n = 3, k = 1
输出:3
示例 2:
输入:m = 3, n = 1, k = 0
输出:1
提示:
1 <= n,m <= 100
0 <= k <= 20
通过次数145,986提交次数278,894
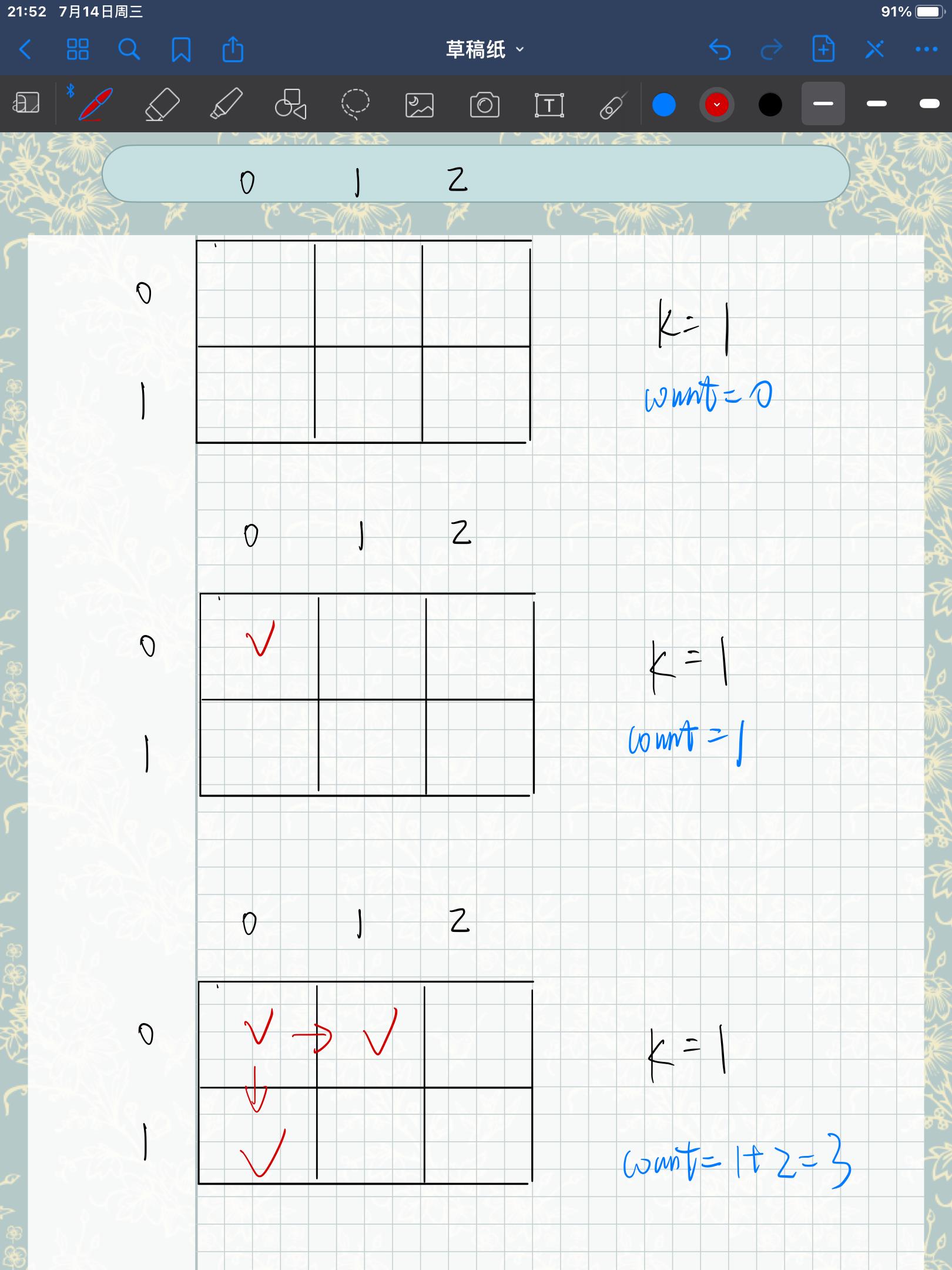
2、深度优先搜索
深度优先搜索: 可以理解为暴力法遍历矩阵中所有字符串可能性。
算法流程:
- 递归参数: 当前元素在矩阵中的行索引 m 和列索引 n ,索引的数位 k ,以及计数索引 x, y 。
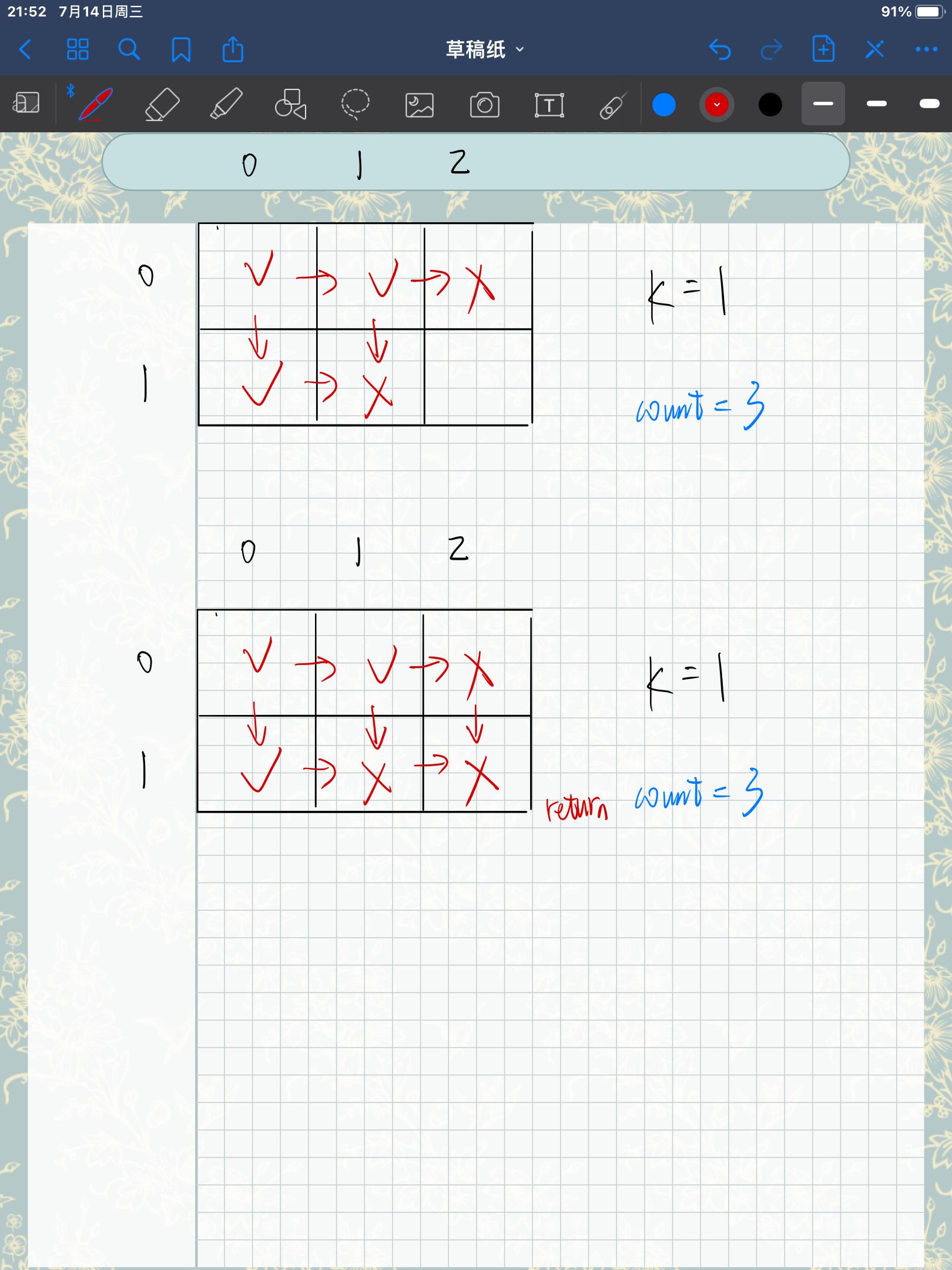
- 终止条件:
- 返回 return;当 (1) 行索引或者列索引越界 (2) 数位和超出目标值 k (3) 当前元素已被访问过。
- 递归过程:
- 标记当前单元格 :将索引 (x, y) 对应的二维向量 visited 中设置为1,代表此单元格已被访问过。
- 搜索下一单元格: 计算当前元素的 上、下、左、右 四个方向元素的数位和,并开启下层递归 。
//面试题13. 机器人的运动范围
//标准做法
class Solution {
public:
int count = 0;
int movingCount(int m, int n, int k) {
if (k == 0) return 1;
vector<vector<int>> visited(m, vector<int>(n));
dfs(visited, 0, 0, m, n, k);
return count;
}
void dfs(vector<vector<int>>& visited, int x, int y, int& m, int& n, int k)
{
if (x >= m || x < 0 || y >= n || y<0 || (x / 10 + x % 10 + y / 10 + y % 10)>k || visited[x][y] == 1)
return;
++count;
visited[x][y] = 1;
int dx[4] = { -1, 0, 1, 0 }, dy[4] = { 0, 1, 0, -1 };
for (int q = 0; q<4; ++q){
int i = x + dx[q], j = y + dy[q];
dfs(visited, i, j, m, n, k);
}
/*dfs(visited, x + 1, y, m, n, k);
dfs(visited, x, y + 1, m, n, k);
dfs(visited, x - 1, y, m, n, k);
dfs(visited, x, y - 1, m, n, k);*/
}
};

4、复杂度
/*
时间复杂度 O(MN) : 最差情况下,机器人遍历矩阵所有单元格,此时时间复杂度为 O(MN) 。
空间复杂度 O(MN) : 最差情况下,visited 内存储矩阵所有单元格的索引,使用 O(MN) 的额外空间。
*/
——————————————————————————————————————
本文由 leetcode、牛客、公众哈哦、知乎共同支持!

https://leetcode-cn.com/u/tefuirnever/

https://blog.nowcoder.net/wsguanxl
https://mp.weixin.qq.com/s/bDwxwQfZytIx4mAn8eK20Q

以上是关于剑指 Offer(C++版本)系列:剑指 Offer 13 机器人的运动范围的主要内容,如果未能解决你的问题,请参考以下文章