STM32串口发送接收数据
Posted 一只小阿大嗷
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了STM32串口发送接收数据相关的知识,希望对你有一定的参考价值。
串口通信
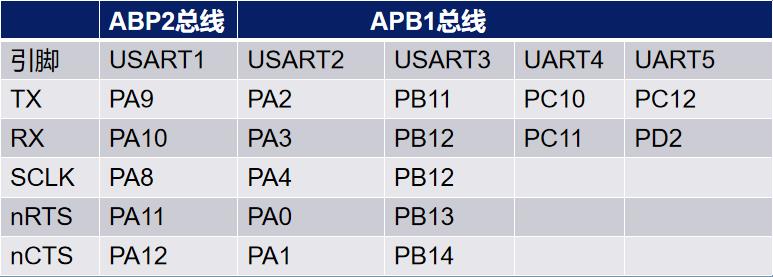
我用的32是stm32f10x最小系统没有UART4和UART5
USART : 通用同步异步收发器
UART : 通用异步收发器
nRTS : 请求发送
nCTS : 请求接收
区别:USART指单片机的一个IO端口模块,可以根据需要配置成同步模式(SPI,IIC),也可以配置成异步模式(UART).可以理解为USART为SPI,IIC对等的”协议”。 UART则不是一个协议,为一个实体。
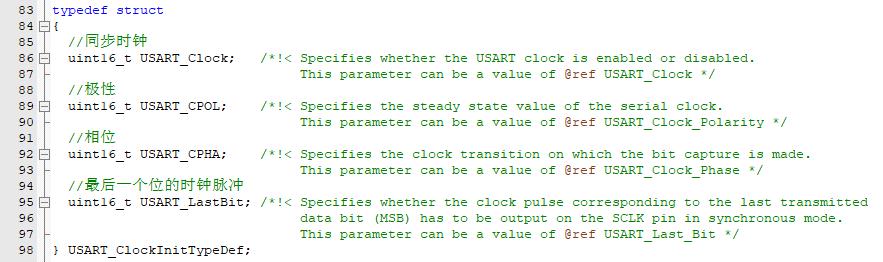
串口的结构体
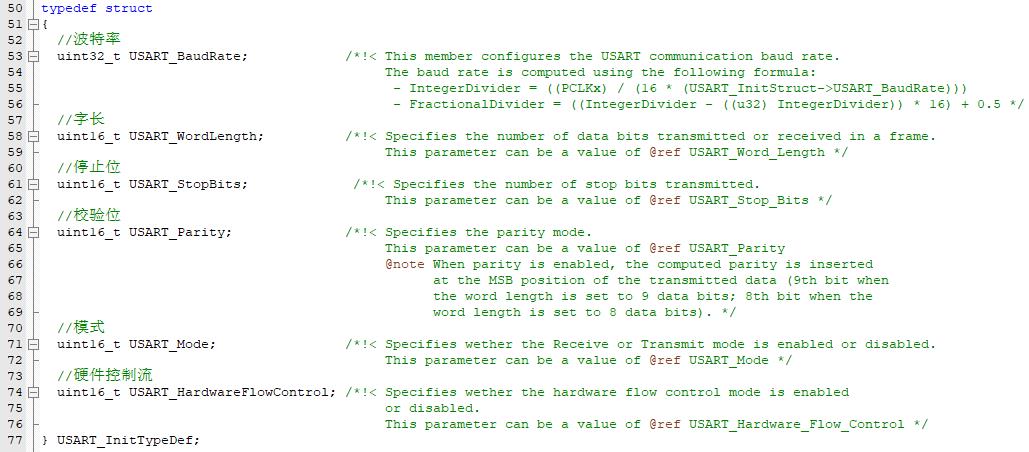

Fck : 串口的时钟(APB1 36M / APB2 72M )
USARTDIV : 无符号的定点数
115200= 72 * 1000000/16 * USARTDIV
如何配置串口的发送
1.配置时钟: GPIO口的时钟,串口的时钟, 引脚复用的时钟
2.配置GPIO的结构体
3.配置串口的结构体
4.串口的发送

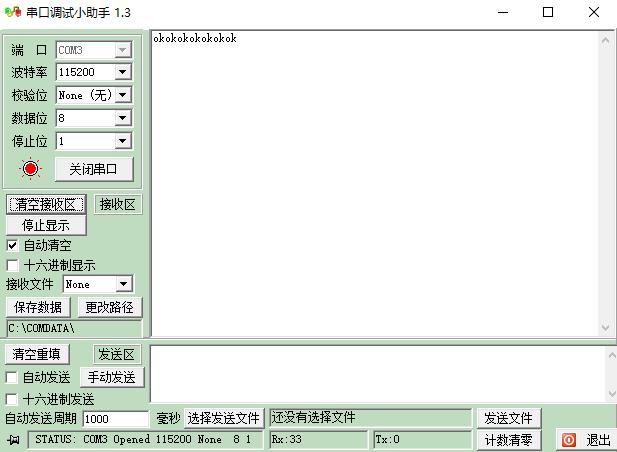
通过串口向电脑发送ok字符
按照上面的四个步骤进行编写
我们会发现只能一个一个发送字符,比较麻烦,所以后面封装了一个可以发送字符串的函数。
usart.c
#include "usart.h"
#include "stm32f10x.h"
void usart_init(void)
{
GPIO_InitTypeDef gpio_init;
USART_InitTypeDef usartStruct;
//1.ÅäÖÃʱÖÓ£ºGPIO¿ÚµÄʱÖÓ£¬Òý½Å¸´ÓõÄʱÖÓ£¬´®¿ÚµÄʱÖÓ
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);
//2.ÅäÖÃGPIOµÄ½á¹¹Ìå
//2.1 TX
gpio_init.GPIO_Mode = GPIO_Mode_AF_PP;
gpio_init.GPIO_Pin = GPIO_Pin_9;
gpio_init.GPIO_Speed = GPIO_Speed_10MHz;
GPIO_Init(GPIOA,&gpio_init);
//2.2 RX
gpio_init.GPIO_Mode = GPIO_Mode_IN_FLOATING;
gpio_init.GPIO_Pin = GPIO_Pin_10;
GPIO_Init(GPIOA,&gpio_init);
//3.ÅäÖô®¿ÚµÄ½á¹¹Ìå
usartStruct.USART_BaudRate = 115200;
usartStruct.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
usartStruct.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
usartStruct.USART_Parity = USART_Parity_No;
usartStruct.USART_StopBits = USART_StopBits_1;
usartStruct.USART_WordLength = USART_WordLength_8b;
USART_Init(USART1,&usartStruct);
USART_Cmd(USART1, ENABLE );
}
usart.h
#include "stm32f10x.h"
void usart_init(void);
main.c
#include "stm32f10x.h"
#include "led.h"
#include "relay.h"
#include "shake.h"
#include "exti.h"
#include "usart.h"
void delay(uint16_t time)
{
uint16_t i =0;
while(time--){
i=12000;
while(i--);
}
}
int main()
{
Led_init();
Relay_Init();
Shake_init();
exti_init();
usart_init();
while(1)
{
USART_SendData(USART1,'n');
//ÏÂÃæUSART_GetFlagStatusΪÁËÅжÏÊý¾Ý¼Ä´æÆ÷ÊÇ·ñΪ¿Õ
while(USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
USART_SendData(USART1,'t');
while(USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
USART_SendData(USART1,'\\n');
while(USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
delay(1000);
}
}
//这是中断函数,前面做震动感应灯用的,没删。
void EXTI1_IRQHandler(void)
{
if (EXTI_GetITStatus( EXTI_Line1 ) != RESET){// ÅжÏÊÇ·ñ·¢ÉúÖжÏ
GPIO_ResetBits(GPIOA, GPIO_Pin_3);
delay(1000);
GPIO_SetBits(GPIOA, GPIO_Pin_3);
}
EXTI_ClearFlag(EXTI_Line1);
}
封装发送字符串函数
注意:在封装发送字符串函数时,while(USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET);是为了把数据发送完
usart.c
#include "usart.h"
#include "stm32f10x.h"
void usart_init(void)
{
GPIO_InitTypeDef gpio_init;
USART_InitTypeDef usartStruct;
//1.ÅäÖÃʱÖÓ£ºGPIO¿ÚµÄʱÖÓ£¬Òý½Å¸´ÓõÄʱÖÓ£¬´®¿ÚµÄʱÖÓ
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);
//2.ÅäÖÃGPIOµÄ½á¹¹Ìå
//2.1 TX
gpio_init.GPIO_Mode = GPIO_Mode_AF_PP;
gpio_init.GPIO_Pin = GPIO_Pin_9;
gpio_init.GPIO_Speed = GPIO_Speed_10MHz;
GPIO_Init(GPIOA,&gpio_init);
//2.2 RX
gpio_init.GPIO_Mode = GPIO_Mode_IN_FLOATING;
gpio_init.GPIO_Pin = GPIO_Pin_10;
GPIO_Init(GPIOA,&gpio_init);
//3.ÅäÖô®¿ÚµÄ½á¹¹Ìå
usartStruct.USART_BaudRate = 115200;
usartStruct.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
usartStruct.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
usartStruct.USART_Parity = USART_Parity_No;
usartStruct.USART_StopBits = USART_StopBits_1;
usartStruct.USART_WordLength = USART_WordLength_8b;
USART_Init(USART1,&usartStruct);
USART_Cmd(USART1, ENABLE );
}
//·â×°ÁËһϷ¢ËÍ×Ö·û
void usartSendByte(USART_TypeDef* USARTx, uint16_t Data)
{
USART_SendData(USARTx,Data);
while(USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
}
//·¢ËÍ×Ö·û´®
void usartSendStr(USART_TypeDef* USARTx,char *str)
{
uint16_t i = 0;
do{
usartSendByte(USARTx,*(str+i));
i++;
}while(*(str+i) != '\\0');
//ÅжÏÊÇ·ñ·¢ËÍÍê
while(USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET);
}
usart.h
#include "stm32f10x.h"
void usart_init(void);
void usartSendByte(USART_TypeDef* USARTx, uint16_t Data);
void usartSendStr(USART_TypeDef* USARTx,char *str);
main.c
#include "stm32f10x.h"
#include "led.h"
#include "relay.h"
#include "shake.h"
#include "exti.h"
#include "usart.h"
void delay(uint16_t time)
{
uint16_t i =0;
while(time--){
i=12000;
while(i--);
}
}
int main()
{
Led_init();
Relay_Init();
Shake_init();
exti_init();
usart_init();
while(1)
{
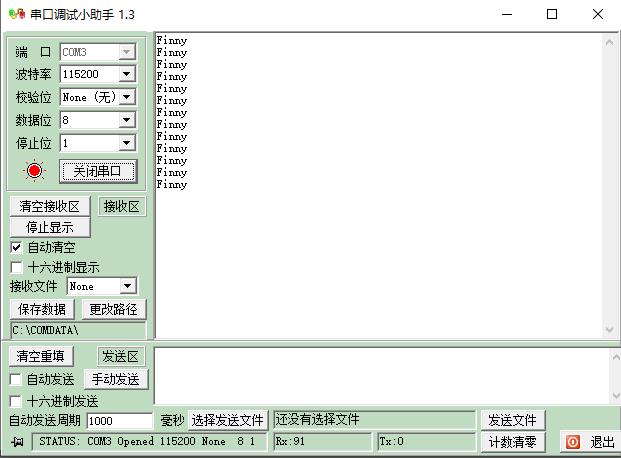
usartSendStr(USART1,"Finny\\r\\n");
delay(1000);
}
}
//这是中断函数,前面做震动感应灯用的,没删。
void EXTI1_IRQHandler(void)
{
if (EXTI_GetITStatus( EXTI_Line1 ) != RESET){// ÅжÏÊÇ·ñ·¢ÉúÖжÏ
GPIO_ResetBits(GPIOA, GPIO_Pin_3);
delay(1000);
GPIO_SetBits(GPIOA, GPIO_Pin_3);
}
EXTI_ClearFlag(EXTI_Line1);
}
以上是关于STM32串口发送接收数据的主要内容,如果未能解决你的问题,请参考以下文章