串级PID构建物理模型分析
Posted QWQ_DIODA
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了串级PID构建物理模型分析相关的知识,希望对你有一定的参考价值。
前言
临近电赛,再次复习一下PID。
由于电赛给的控制系统较为复杂,所以这次是以串级PID物理模型分析为主。
毕竟只有建立了对应系统的PID模型才能更好的去设计代码和调节参数。
至于代码。。大概明天会写个PID的库。。。。大概吧(咕咕咕 )
1、PID的限制
PID是线性的控制器及算法。
这是怎么得出来的结论呐?
很简单
我们直接看PID的公式

这就很明显了
输出U和输入err明显是一个线性的关系
什么?你还不知道什么是线性?
满足齐次性和叠加性的函数就是线性的。
而且,PID控制器最好是控制二阶以下的线性系统才可以。
(其实直接控制二阶系统也不是不可以,只是不稳定,但是竞赛追求的就是稳定,所以就不展开讨论 )
举个例子
加速度是路程在时间上的二次微分
速度是路程在时间上的一次微分
也就是说,我们可以用位置误差作为输入,通过PID控制器输出速度,从而控制物体位置
但是最好不要直接通过位置误差的反馈输出加速度来控制物体位置
但是如果我们的系统只能直接控制物体的加速度怎么办?
这时就可以引入串级PID的概念。
2、串级PID概念
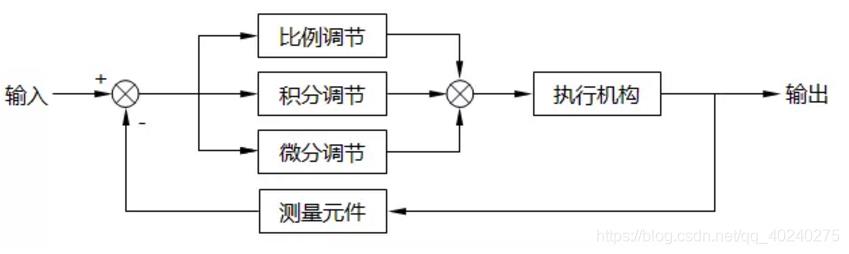
常规的一级PID就是很常规的一个输入(误差)和一个输出
输出通过传感器、测量元件与输入相减算出误差作为输入
输入后通过P、I、D三个控件调节输出。
而串级PID就略微复杂了。
他是这样的
这时一个简单的二阶串级PID。(控制器就是PID控制器简化的画法)
什么是串呐,就像串联电路一样,前一个PID控制器的输出作为后一个PID控制器的输入,这就是串级PID。
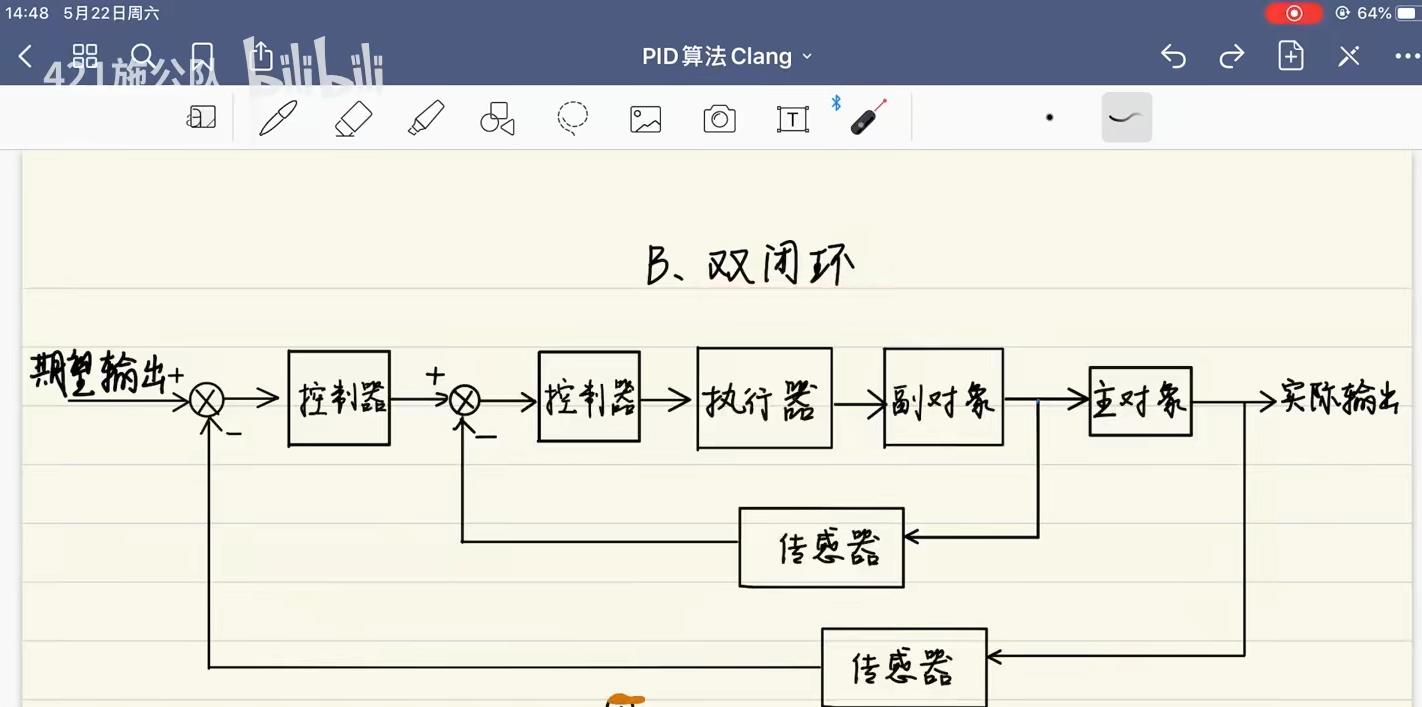
此图截取自b站UP:421施公队
侵删
3、串级PID系统的分析
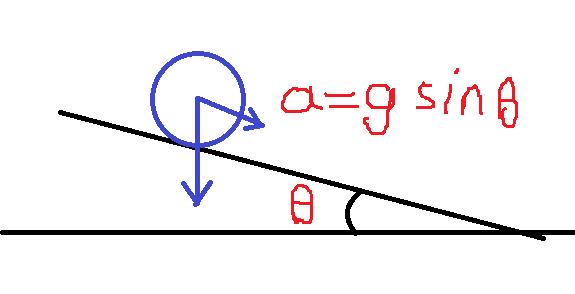
想必大家也看出来了,我在 PID的限制 里举得例子其实就是2017年电赛控制题,板球控制系统的模型。
在这道题中
我们能直接控制的只有帆板的角度θ
而帆板的角度θ又和小球的加速度有着直接的,可明确的线性关系。
所以上我们能直接控制的就是小球的加速度。
这下就很明显了
这个PID系统的输出量就得是小球的加速度了
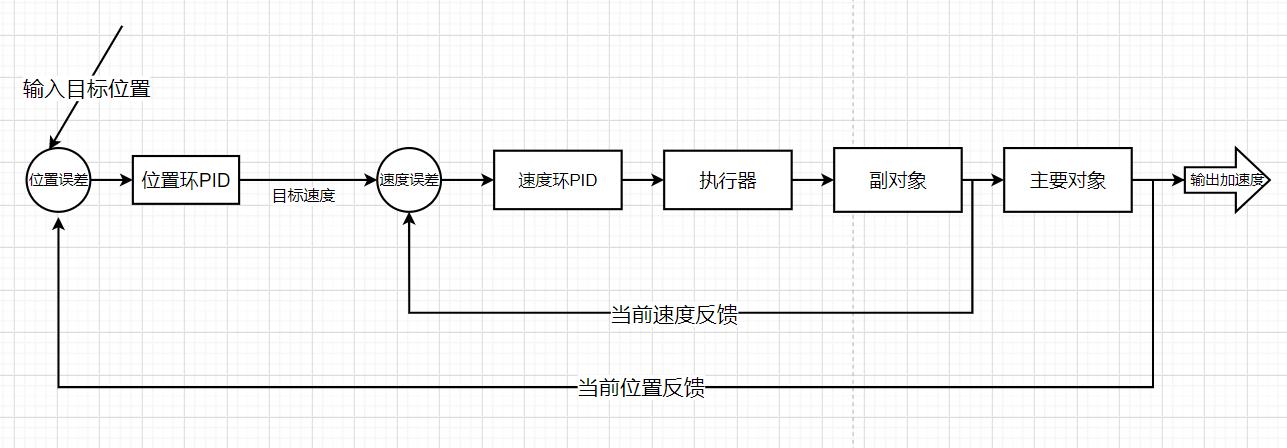
再对整个系统分析。
我们要控制的目标量是小球的位置,所以外环的输入量就应该是小球的位置误差。
什么能直接控制小球的位置,或者说和小球位置成线性关系呐?
那就是速度!!!
同时,我们也发现,速度也和加速度也是可以直接控制的线性关系。
那这时,问题就迎刃而解了,我们可以设计一个外环是位置环,内环是加速度环的串级PID。
也就是
4、后记
代码部分明天单独更新。
以上是关于串级PID构建物理模型分析的主要内容,如果未能解决你的问题,请参考以下文章