有了“手掌”,机械手也能盘“核桃”,耶鲁出品 | Science子刊
Posted QbitAl
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了有了“手掌”,机械手也能盘“核桃”,耶鲁出品 | Science子刊相关的知识,希望对你有一定的参考价值。
月石一 发自 凹非寺
量子位 报道 | 公众号 QbitAI
现在,一只结构简单的机械手,就能实现复杂的操作。
你看它盘起这对儿“核桃”(中国特产:保定球),是不是相当稳?
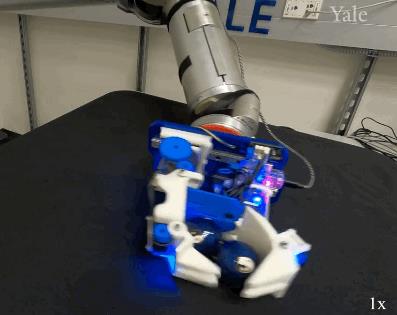
值得注意的是,它并不像大多数机械手一样,只依靠“手指”来活动,而是将手掌与手指结合,无论是手形还是动作,都更接近人类。
因此,它还能玩转不规则的瓶子,旋转、倾斜、挤压一气呵成:

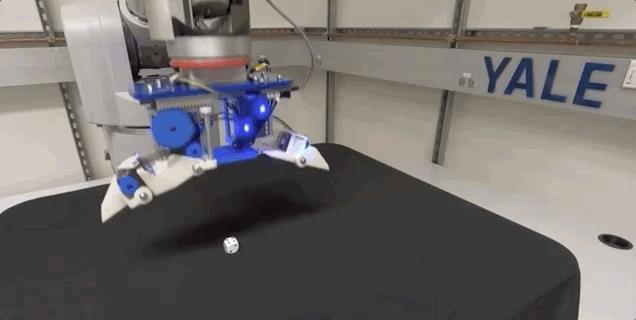
当然,抓起小骰子也不费力:
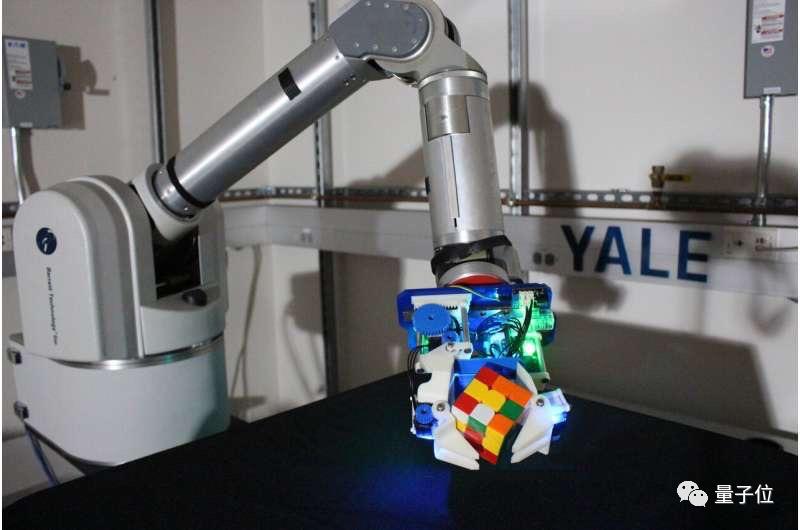
这是来自耶鲁大学的最新研究成果——笼式(cage)机械手Model W,通过触点断开和锁定,让结构简单的机械手实现复杂的操作。
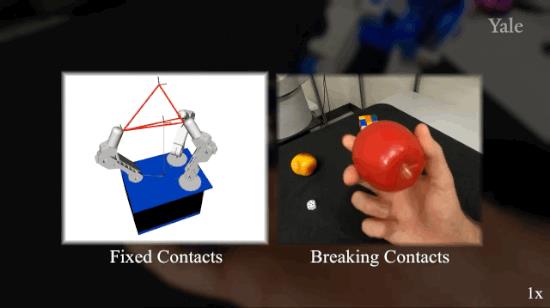
△触点锁定和触点断开
相关论文已经在《Science Robotics》上发表。
把健身球盘的比我还稳,具体是怎么做到的?
笼式机械手
由于大多数机械手都是通过指尖操纵对象,虽然具有一定的灵活性,但是比起人手,仍相去甚远。
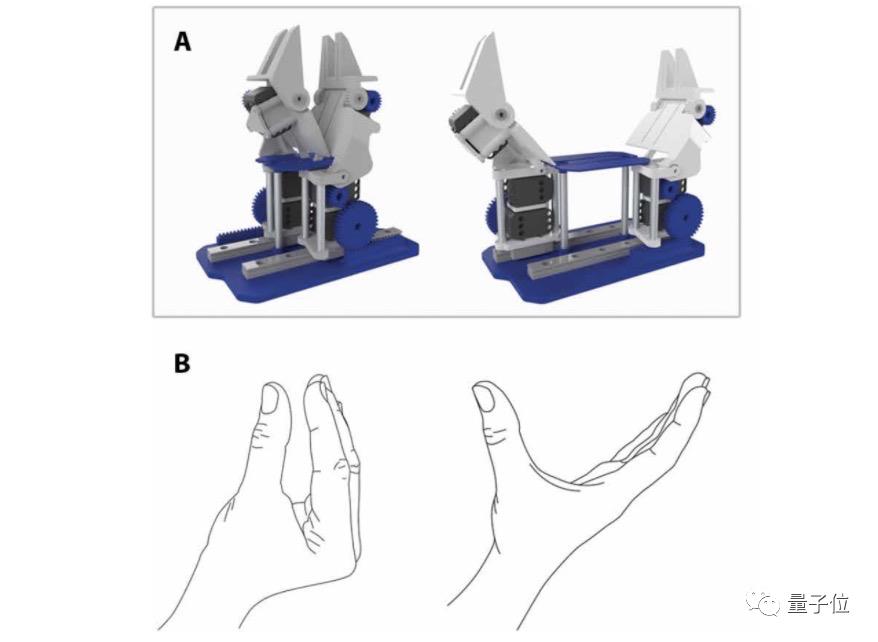
耶鲁的研究团队指出,人类的手之所以更加灵巧,原因之一就在于手掌与手指的结合使用。
这需要通过模拟所有平面手指的拓扑结构实现,利用手指和手掌的所有内表面进行操作,使接触点可以在滚动、固定和滑动模式之间无缝切换;
并且,手指、手掌可以形成像笼子一样的结构,使物体不易从手中弹出。这使得抓握的稳定性,不再取决于接触位置、力或模式的有关参数。
于是,研究团队用旋转关节(R)和棱柱形关节(P)组合出了14种拓扑结构,它们具有不同的手指开合角度ϕ、手掌宽度p,以及两节手指的长度l和d。
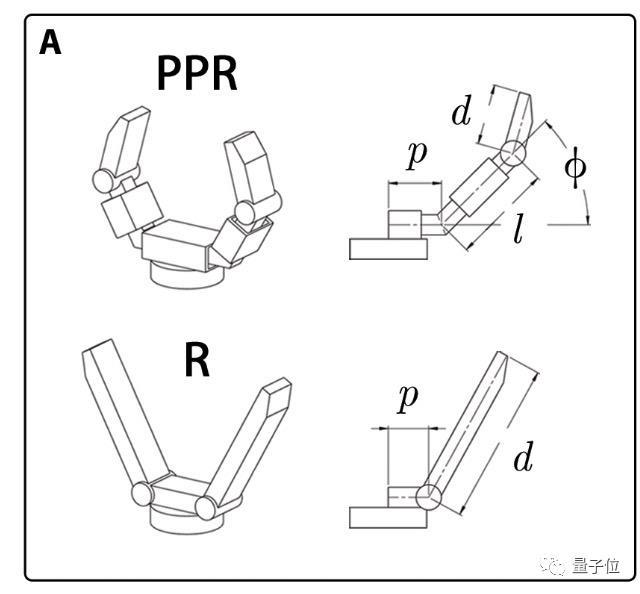
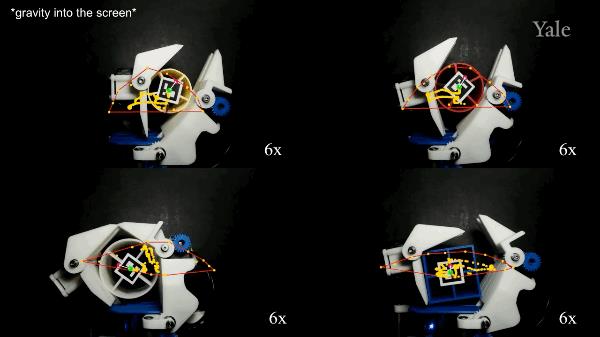
在此基础上,研究人员得到了6250种手部设计,通过仿真模拟,找到了可操纵性最高的结构——RPR和PRR。
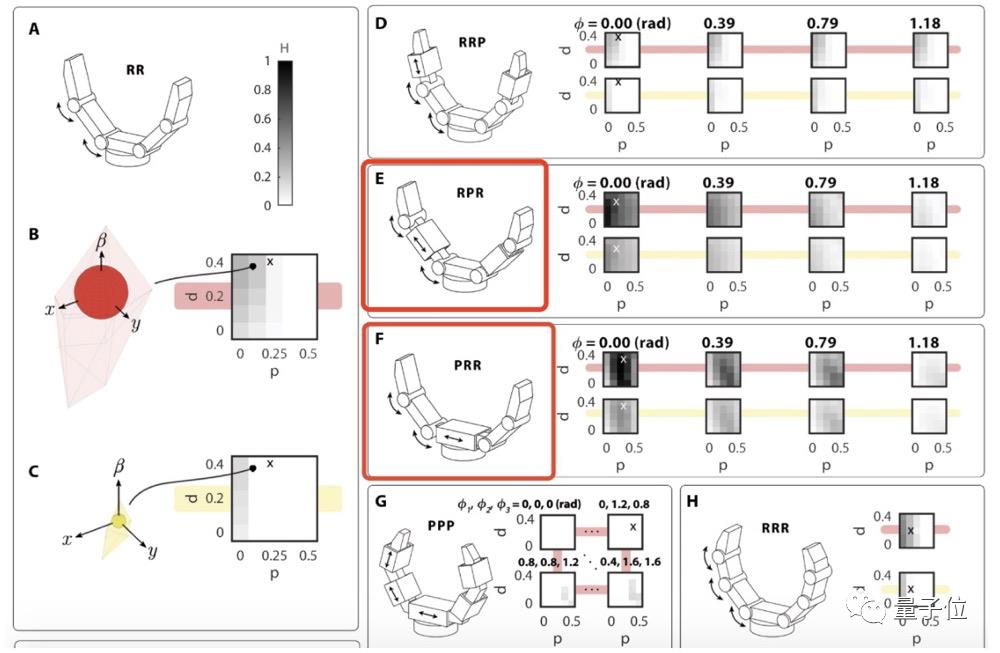
△部分仿真结果
最终,团队根据PRR的参数值(ϕ=0、p=0.25、l=0.43、d=0.32),设计出了机械手Model W。
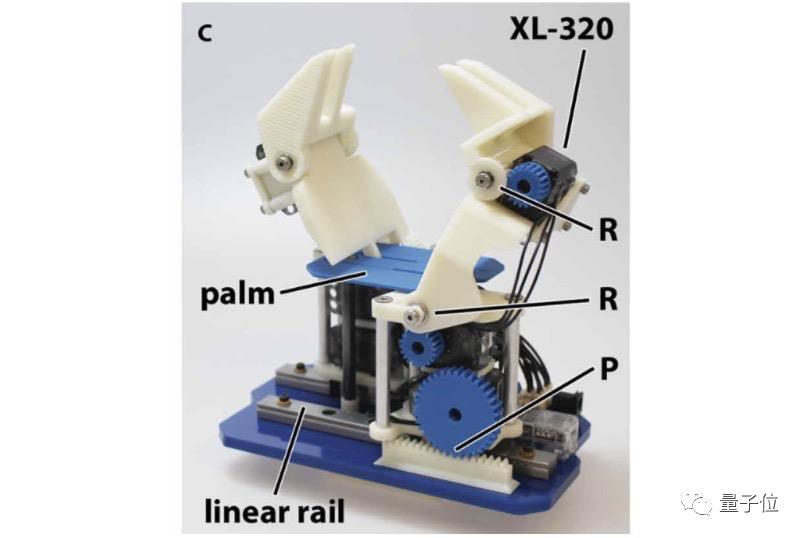
通过滑架在导轨上平移,带动手指的旋转关节,使指尖相互交叉,以更好地模拟人手。
此外,机械手需要6个伺服电机来驱动,为控制成本,研究人员选择了市面上最便宜的Dynamixel XL-320,单个售价约为人民币200元。
拿捏转、大小尺寸通通hold住
通过执行4个简单动作及相互切换,研究团队初步评估了Model W的性能,结果表明机械手能够快速、无缝地执行这些动作。
在将Model W装配到机械臂后,团队使用Yale-CMU-Berkeley(YCB)对象集,进行了进一步的测试。
YCB对象集用于机器人操纵中的基准测试,包括77个对象,分为5类:食物、厨房用品、工具、各种形状、不同任务。
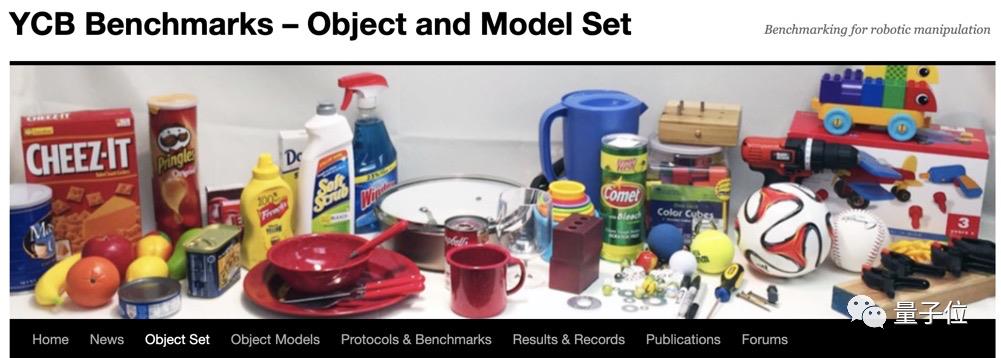
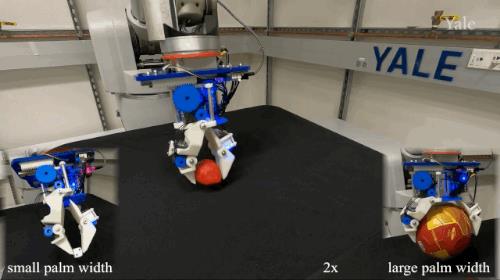
测试结果表明,小到骰子,大到210mm的饼干盒、140mm的迷你足球,都在有效拾取的尺寸范围内。
这是由于手掌的棱柱形特性,使机械手开合范围超过300mm。
研究人员还利用4个测试对象,对机械手的工作空间进行了评估,结果表明,W型具有较大的、完全连接的工作空间。
除了抓取尺寸大、操作空间大,Model W能做的还有很多,比如,
将积木插入匹配的孔中:

向各个方向翻转物体;连续旋转立方体对象:

拿起不规则的瓶子,旋转、挤压;对物体施加变化的力度:
这种从抓取到夹紧的过渡,对于很多抓取机械手来说,都是一项艰巨的任务。
此外,Model W还能“盘核桃”、同时玩转多个对象,既可以是软硬不同材质的球,也可以是尺寸更大的健身球。

研究团队表示:
Model W的笼式结构能够控制住对象,防止物体脱手造成危险,并且它具有简单的拓扑结构,这为实现通用灵巧的机械手奠定了基础。
参考链接:
[1]https://robotics.sciencemag.org/content/6/54/eabd2666
[2]https://www.youtube.com/watch?v=-dUhGyaH4Vc
[3]https://techxplore.com/news/2021-05-highly-dexterous-robot-caging-mechanism.html
[4]https://registry.opendata.aws/ycb-benchmarks/
[5]http://www.ycbbenchmarks.com/
以上是关于有了“手掌”,机械手也能盘“核桃”,耶鲁出品 | Science子刊的主要内容,如果未能解决你的问题,请参考以下文章