BP预测基于粒子群算法改进BP神经网络实现数据预测
Posted 博主企鹅号1575304183
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了BP预测基于粒子群算法改进BP神经网络实现数据预测相关的知识,希望对你有一定的参考价值。
一、 BP神经网络预测算法简介
说明:1.1节主要是概括和帮助理解考虑影响因素的BP神经网络算法原理,即常规的BP模型训练原理讲解(可根据自身掌握的知识是否跳过)。1.2节开始讲基于历史值影响的BP神经网络预测模型。
使用BP神经网络进行预测时,从考虑的输入指标角度,主要有两类模型:
1.1 受相关指标影响的BP神经网络算法原理
如图一所示,使用MATLAB的newff函数训练BP时,可以看到大部分情况是三层的神经网络(即输入层,隐含层,输出层)。这里帮助理解下神经网络原理:
1)输入层:相当于人的五官,五官获取外部信息,对应神经网络模型input端口接收输入数据的过程。
2)隐含层:对应人的大脑,大脑对五官传递来的数据进行分析和思考,神经网络的隐含层hidden Layer对输入层传来的数据x进行映射,简单理解为一个公式hiddenLayer_output=F(w*x+b)。其中,w、b叫做权重、阈值参数,F()为映射规则,也叫激活函数,hiddenLayer_output是隐含层对于传来的数据映射的输出值。换句话说,隐含层对于输入的影响因素数据x进行了映射,产生了映射值。
3)输出层:可以对应为人的四肢,大脑对五官传来的信息经过思考(隐含层映射)之后,再控制四肢执行动作(向外部作出响应)。类似地,BP神经网络的输出层对hiddenLayer_output再次进行映射,outputLayer_output=w *hiddenLayer_output+b。其中,w、b为权重、阈值参数,outputLayer_output是神经网络输出层的输出值(也叫仿真值、预测值)(理解为,人脑对外的执行动作,比如婴儿拍打桌子)。
4)梯度下降算法:通过计算outputLayer_output和神经网络模型传入的y值之间的偏差,使用算法来相应调整权重和阈值等参数。这个过程,可以理解为婴儿拍打桌子,打偏了,根据偏离的距离远近,来调整身体使得再次挥动的胳膊不断靠近桌子,最终打中。
再举个例子来加深理解:
图一所示BP神经网络,具备输入层、隐含层和输出层。BP是如何通过这三层结构来实现输出层的输出值outputLayer_output,不断逼近给定的y值,从而训练得到一个精准的模型的呢?
从图中串起来的端口,可以想到一个过程:坐地铁,将图一想象为一条地铁线路。王某某坐地铁回家的一天:在input起点站上车,中途经过了很多站(hiddenLayer),然后发现坐过头了(outputLayer对应现在的位置),那么王某某将会根据现在的位置离家(目标Target)的距离(误差Error),返回到中途的地铁站(hiddenLayer)重新坐地铁(误差反向传递,使用梯度下降算法更新w和b),如果王某某又一次发生失误,那么将再次进行这个调整的过程。
从在婴儿拍打桌子和王某某坐地铁的例子中,思考问题:BP的完整训练,需要先传入数据给input,再经过隐含层的映射,输出层得到BP仿真值,根据仿真值与目标值的误差,来调整参数,使得仿真值不断逼近目标值。比如(1)婴儿受到了外界的干扰因素(x),从而作出反应拍桌(predict),大脑不断的调整胳膊位置,控制四肢拍准(y、Target)。(2)王某某上车点(x),过站点(predict),不断返回中途站来调整位置,到家(y、Target)。
在这些环节中,涉及了影响因素数据x,目标值数据y(Target)。根据x,y,使用BP算法来寻求x与y之间存在的规律,实现由x来映射逼近y,这就是BP神经网络算法的作用。再多说一句,上述讲的过程,都是BP模型训练,那么最终得到的模型虽然训练准确,但是找到的规律(bp network)是否准确与可靠呢。于是,我们再给x1到训练好的bp network中,得到相应的BP输出值(预测值)predict1,通过作图,计算Mse,Mape,R方等指标,来对比predict1和y1的接近程度,就可以知道模型是否预测准确。这是BP模型的测试过程,即实现对数据的预测,并且对比实际值检验预测是否准确。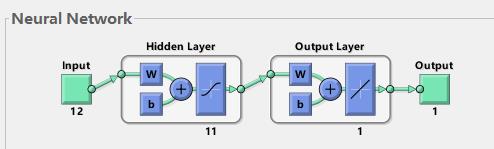
图一 3层BP神经网络结构图
1.2 基于历史值影响的BP神经网络
以电力负荷预测问题为例,进行两种模型的区分。在预测某个时间段内的电力负荷时:
一种做法,是考虑 t 时刻的气候因素指标,比如该时刻的空气湿度x1,温度x2,以及节假日x3等的影响,对 t 时刻的负荷值进行预测。这是前面1.1所说的模型。
另一种做法,是认为电力负荷值的变化,与时间相关,比如认为t-1,t-2,t-3时刻的电力负荷值与t时刻的负荷值有关系,即满足公式y(t)=F(y(t-1),y(t-2),y(t-3))。采用BP神经网络进行训练模型时,则输入到神经网络的影响因素值为历史负荷值y(t-1),y(t-2),y(t-3),特别地,3叫做自回归阶数或者延迟。给到神经网络中的目标输出值为y(t)。
二、粒子群算法
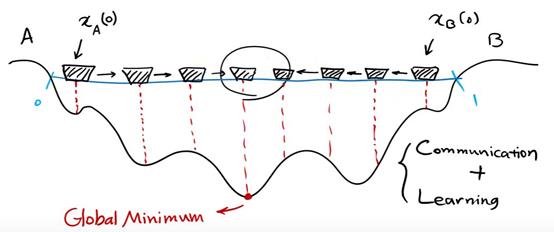
粒子群算法是在1995年由Eberhart博士和Kennedy博士一起提出的,它源于对鸟群捕食行为的研究。它的基本核心是利用群体中的个体对信息的共享从而使整个群体的运动在问题求解空间中产生从无序到有序的演化过程,从而获得问题的最优解。设想这么一个场景:一群鸟进行觅食,而远处有一片玉米地,所有的鸟都不知道玉米地到底在哪里,但是它们知道自己当前的位置距离玉米地有多远。那么找到玉米地的最佳策略,也是最简单有效的策略就是搜寻目前距离玉米地最近的鸟群的周围区域。
在PSO中,每个优化问题的解都是搜索空间中的一只鸟,称之为"粒子",而问题的最优解就对应于鸟群中寻找的"玉米地"。所有的粒子都具有一个位置向量(粒子在解空间的位置)和速度向量(决定下次飞行的方向和速度),并可以根据目标函数来计算当前的所在位置的适应值(fitness value),可以将其理解为距离"玉米地"的距离。在每次的迭代中,种群中的例子除了根据自身的经验(历史位置)进行学习以外,还可以根据种群中最优粒子的"经验"来学习,从而确定下一次迭代时需要如何调整和改变飞行的方向和速度。就这样逐步迭代,最终整个种群的例子就会逐步趋于最优解。
上面的解释可能还比较抽象,下面通过一个简单的例子来进行说明
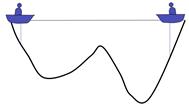
在一个湖中有两个人他们之间可以通信,并且可以探测到自己所在位置的最低点。初始位置如上图所示,由于右边比较深,因此左边的人会往右边移动一下小船。
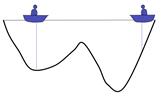
现在左边比较深,因此右边的人会往左边移动一下小船
一直重复该过程,最后两个小船会相遇
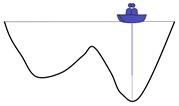
得到一个局部的最优解
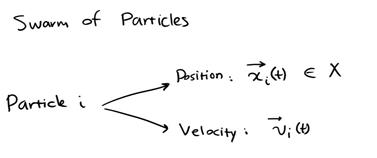
将每个个体表示为粒子。每个个体在某一时刻的位置表示为,x(t),方向表示为v(t)
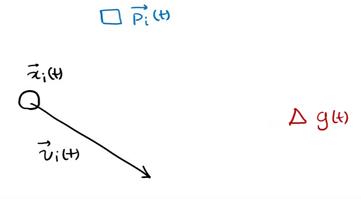
p(t)为在t时刻x个体的自己的最优解,g(t)为在t时刻所有个体的最优解,v(t)为个体在t时刻的方向,x(t)为个体在t时刻的位置
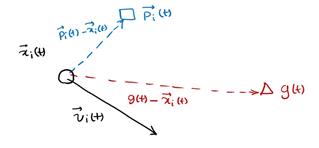
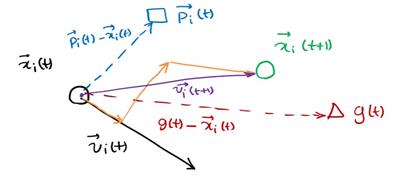
下一个位置为上图所示由x,p,g共同决定了
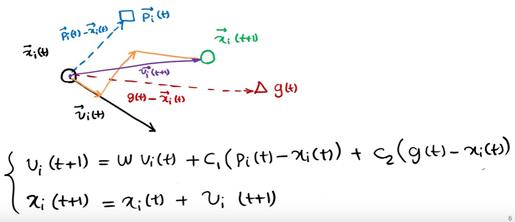
种群中的粒子通过不断地向自身和种群的历史信息进行学习,从而可以找到问题的最优解。
但是,在后续的研究中表表明,上述原始的公式中存在一个问题:公式中V的更新太具有随机性,从而使整个PSO算法的全局优化能力很强,但是局部搜索能力较差。而实际上,我们需要在算法迭代初期PSO有着较强的全局优化能力,而在算法的后期,整个种群应该具有更强的局部搜索能力。所以根据上述的弊端,shi和Eberhart通过引入惯性权重修改了公式,从而提出了PSO的惯性权重模型:
每一个向量的分量表示如下
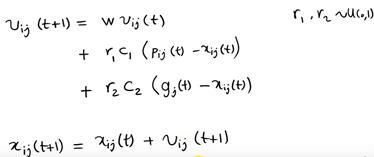
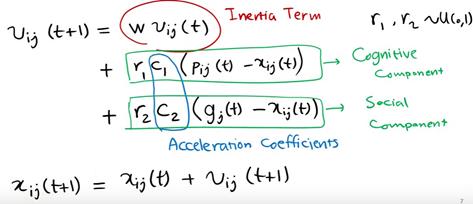
其中w称为是PSO的惯性权重,它的取值介于【0,1】区间,一般应用中均采用自适应的取值方法,即一开始令w=0.9,使得PSO全局优化能力较强,随着迭代的深入,参数w进行递减,从而使的PSO具有较强的局部优化能力,当迭代结束时,w=0.1。参数c1和c2称为学习因子,一般设置为1,4961;而r1和r2为介于[0,1]之间的随机概率值。
整个粒子群优化算法的算法框架如下:
step1种群初始化,可以进行随机初始化或者根据被优化的问题设计特定的初始化方法,然后计算个体的适应值,从而选择出个体的局部最优位置向量和种群的全局最优位置向量。
step2 迭代设置:设置迭代次数,并令当前迭代次数为1
step3 速度更新:更新每个个体的速度向量
step4 位置更新:更新每个个体的位置向量
step5 局部位置和全局位置向量更新:更新每个个体的局部最优解和种群的全局最优解
step6 终止条件判断:判断迭代次数时都达到最大迭代次数,如果满足,输出全局最优解,否则继续进行迭代,跳转至step 3。
对于粒子群优化算法的运用,主要是对速度和位置向量迭代算子的设计。迭代算子是否有效将决定整个PSO算法性能的优劣,所以如何设计PSO的迭代算子是PSO算法应用的研究重点和难点。
三、部分代码
clc;clear;close all;
%% 初始化种群
f= @(a,b,c,d,e)(a.*b.*c.*d.*e); % 函数表达式
% figure(1);
% [x0_1, x0_2]=meshgrid(0:.2:20);
% y0=f(x0_1,x0_2);
% mesh(x0_1, x0_2, y0);
% hold on;
N = 500; % 初始种群个数
d = 5; % 空间维数
ger = 300; % 最大迭代次数
limit = [0, 20;0,20;0,20;0,20;0,20]; % 设置位置参数限制(矩阵的形式可以多维)
vlimit = [-1.5, 1.5;-1.5, 1.5;-1.5, 1.5;-1.5, 1.5;-1.5, 1.5]; % 设置速度限制
c_1 = 0.8; % 惯性权重
c_2 = 0.5; % 自我学习因子
c_3 = 0.5; % 群体学习因子
for i = 1:d
x(:,i) = limit(i, 1) + (limit(i, 2) - limit(i, 1)) * rand(N, 1);%初始种群的位置
end
v = rand(N, d); % 初始种群的速度
xm = x; % 每个个体的历史最佳位置
ym = zeros(1, d); % 种群的历史最佳位置
fxm = zeros(N, 1); % 每个个体的历史最佳适应度
fym = -inf; % 种群历史最佳适应度
% plot3(xm(:,1),xm(:,2),f(xm(:,1),xm(:,2)), 'ro');title('初始状态图');
% hold on;
% figure(2);
% mesh(x0_1, x0_2, y0);
% hold on;
% plot3(xm(:,1),xm(:,2),f(xm(:,1),xm(:,2)), 'ro');
% hold on;
%% 粒子群工作
iter = 1;
times = 1;
record = zeros(ger, 1); % 记录器
while iter <= ger
fx = f(x(:,1),x(:,2),x(:,3),x(:,4),x(:,5)) ; % 个体当前适应度
for i = 1:N
if fxm(i) < fx(i)
fxm(i) = fx(i); % 更新个体历史最佳适应度
xm(i,:) = x(i,:); % 更新个体历史最佳位置
end
end
if fym < max(fxm)
[fym, nmax] = max(fxm); % 更新群体历史最佳适应度
ym = xm(nmax, :); % 更新群体历史最佳位置
end
v = v * c_1 + c_2 * rand *(xm - x) + c_3 * rand *(repmat(ym, N, 1) - x);% 速度更新
% 边界速度处理
for i=1:d
for j=1:N
if v(j,i)>vlimit(i,2)
v(j,i)=vlimit(i,2);
end
if v(j,i) < vlimit(i,1)
v(j,i)=vlimit(i,1);
end
end
end
x = x + v;% 位置更新
% 边界位置处理
for i=1:d
for j=1:N
if x(j,i)>limit(i,2)
x(j,i)=limit(i,2);
end
if x(j,i) < limit(i,1)
x(j,i)=limit(i,1);
end
end
end
record(iter) = fym;%最大值记录
% if times >= 10
% cla;
% mesh(x0_1, x0_2, y0);
% plot3(x(:,1),x(:,2),f(x(:,1),x(:,2)), 'ro');title('状态位置变化');
% pause(0.5);
% times=0;
% end
iter = iter+1;
times=times+1;
end
、
四、仿真结果
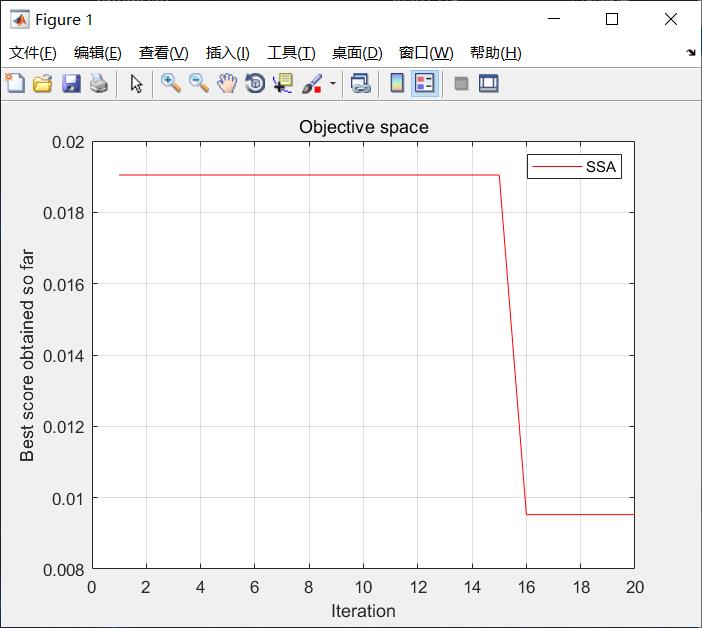
图2粒子群算法收敛曲线
测试统计如下表所示
| 测试结果 | 测试集正确率 | 训练集正确率 |
|---|---|---|
| BP神经网络 | 100% | 95% |
| PSO-BP | 100% | 99.8% |
五、参考文献及代码私信博主
《基于BP神经网络的宁夏水资源需求量预测》
以上是关于BP预测基于粒子群算法改进BP神经网络实现数据预测的主要内容,如果未能解决你的问题,请参考以下文章
BP预测基于粒子群算法优化BP神经网络实现数据预测matlab源码