PCL随机采样一致性:RANSAC 平面拟合
Posted 借我十斤肉
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了PCL随机采样一致性:RANSAC 平面拟合相关的知识,希望对你有一定的参考价值。
1 平面方程
平面方程 是指空间中所有处于同一平面的点所对应的方程,其一般式形如 A x + B y + C z + D = 0 Ax+By+Cz+D=0 Ax+By+Cz+D=0点已知平面法向量 ( A , B , C ) (A,B,C) (A,B,C) 和平面上一点 p 0 ( x 0 , y 0 , z 0 ) p_0(x_0,y_0,z_0) p0(x0,y0,z0),则平面的点法式方程为 A ( x − x 0 ) + B ( y − y 0 ) + C ( z − z 0 ) = 0 A(x-x_0)+B(y-y_0)+C(z-z_0)=0 A(x−x0)+B(y−y0)+C(z−z0)=0将点法式展开,其常数项 − ( A x 0 + B y 0 + C z 0 ) -(Ax_0+By_0+Cz_0) −(Ax0+By0+Cz0)即为一般式方程中的 D D D,即 D = − ( A x 0 + B y 0 + C z 0 ) D=-(Ax_0+By_0+Cz_0) D=−(Ax0+By0+Cz0)
2 算法原理
与最小二乘算法不同,随机采样一致性算法(RANSAC)不是用所有初始数据去获取一个初始解,然后剔除无效数据,而是使用满足可行条件的尽量少的初始数据,并使用一致性数据集去扩大它,这是一种寻找模型去拟合数据的思想,在计算机视觉领域有较广泛的应用。
RANSAC平面拟合的过程如下:
(1)在初始点云中随机选择三个点,计算其对应平面方程 a x + b y + c z + d = 0 ax + by + cz+d=0 ax+by+cz+d=0.
(2)计算所有点至该平面的代数距离 d i = ∣ a x i + b y i + c z i + d ∣ d_i=|ax_i+by_i+cz_i+d| di=∣axi+byi+czi+d∣ .选取阈值 d t h r e s h o l d d_{threshold} dthreshold,若 d i ≤ d t h r e s h o l d di≤d_{threshold} di≤dthreshold ,则该点被认为是模型内样本点(内点),否则为模型外样本点(外点),记录当前内点的个数。
(3)重复以上步骤,选取最佳拟合参数,即内点数量最多的平面对应的模型参数;每次迭代末尾都会根据期望的误差率、最佳内点个数、总样本个数、当前迭代次数计算一个迭代结束评判因子,根据次决定是否停止迭代。
(4)迭代结束后,最佳模型参数就是最终的参数估计值。
3 算法实现
PCL中Sample——consensus模块提供了RANSAC平面拟合模块。
SACMODEL_PLANE模型:定义为平面模型,共设置四个参数 [normal_x,normal_y,normal_z,d]。其中,(normal_x,normal_y,normal_z)为平面法向量,d为常数项。
实现代码
#include <iostream>
#include <pcl/io/pcd_io.h>
#include <pcl/sample_consensus/ransac.h>
#include <pcl/sample_consensus/sac_model_plane.h>
#include <pcl/visualization/pcl_visualizer.h>
using namespace std;
int main()
{
//---------------------------------------------
//-------------------加载点云-------------------
//---------------------------------------------
cout << "->正在加载点云..." << endl;
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
if (pcl::io::loadPCDFile("plane.pcd", *cloud) < 0)
{
PCL_ERROR("警告!点云文件不存在!\\a\\n");
system("pause");
return -1;
}
//---------------------------------------------
//-------------------模型估计-------------------
//---------------------------------------------
cout << "->正在估计平面..." << endl;
pcl::SampleConsensusModelPlane<pcl::PointXYZ>::Ptr model_plane(new pcl::SampleConsensusModelPlane<pcl::PointXYZ>(cloud)); //选择拟合点云与几何模型
pcl::RandomSampleConsensus<pcl::PointXYZ> ransac(model_plane); //创建随机采样一致性对象
ransac.setDistanceThreshold(0.01); //设置距离阈值,与平面距离小于0.01的点作为内点
ransac.computeModel(); //执行模型估计
vector<int> inliers; //存储内点索引的向量
ransac.getInliers(inliers); //提取内点对应的索引
/// 根据索引提取内点
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_plane(new pcl::PointCloud<pcl::PointXYZ>);
pcl::copyPointCloud<pcl::PointXYZ>(*cloud, inliers, *cloud_plane);
/// 输出模型参数ax+by+cz+d=0
Eigen::VectorXf coefficient;
ransac.getModelCoefficients(coefficient);
cout << "平面方程为:\\n"
<< coefficient[0] << "x + "
<< coefficient[1] << "y + "
<< coefficient[2] << "z + "
<< coefficient[3] << " = 0"
<< endl;
//==========================================↓ 可视化拟合结果 ↓==========================================
pcl::visualization::PCLVisualizer::Ptr viewer(new pcl::visualization::PCLVisualizer("拟合结果"));
viewer->addPointCloud<pcl::PointXYZ>(cloud, "cloud"); //添加原始点云
viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_COLOR, 1, 1, 1, "cloud"); //颜色
viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 2, "cloud"); //点的大小
viewer->addPointCloud<pcl::PointXYZ>(cloud_plane, "plane"); //添加平面点云
viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_COLOR, 0, 1, 0, "plane"); //颜色
viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 2, "plane"); //点的大小
while (!viewer->wasStopped())
{
viewer->spinOnce(100);
boost::this_thread::sleep(boost::posix_time::microseconds(100000));
}
//==========================================↑ 可视化拟合结果 ↑==========================================
return 0;
}
输出结果:
->正在加载点云...
->正在估计平面...
平面方程为:
-0.00847471x + -0.879568y + -0.475697z + -1.16966 = 0
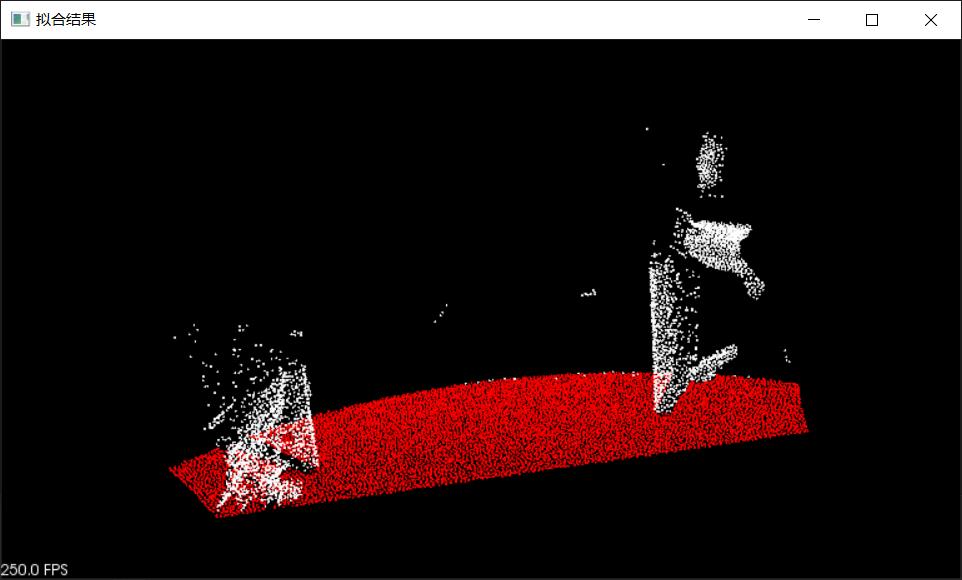
拟合结果:
以上是关于PCL随机采样一致性:RANSAC 平面拟合的主要内容,如果未能解决你的问题,请参考以下文章