ROS系统 通过服务编程实现两个数相加并返回
Posted ʚVVcatɞ
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ROS系统 通过服务编程实现两个数相加并返回相关的知识,希望对你有一定的参考价值。
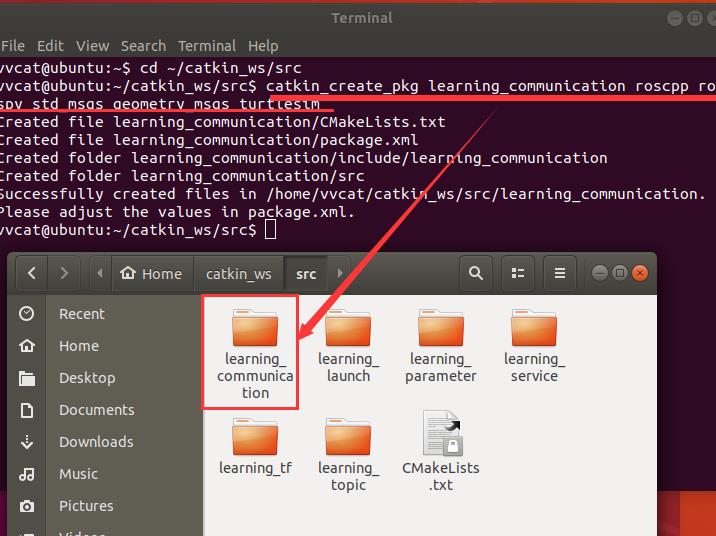
创建功能包
cd ~/catkin_ws/src
catkin_create_pkg learning_communication roscpp rospy std_msgs geometry_msgs turtlesim
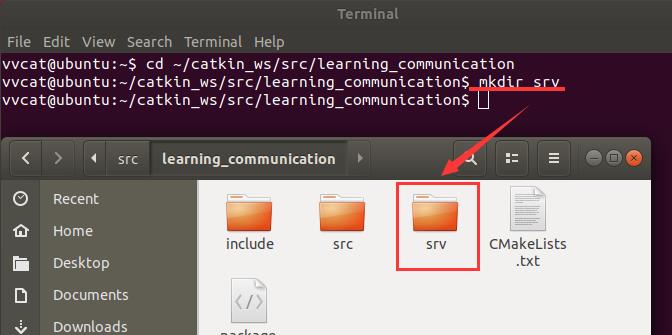
定义 srv 文件
cd ~/catkin_ws/src/learning_communication
mkdir srv
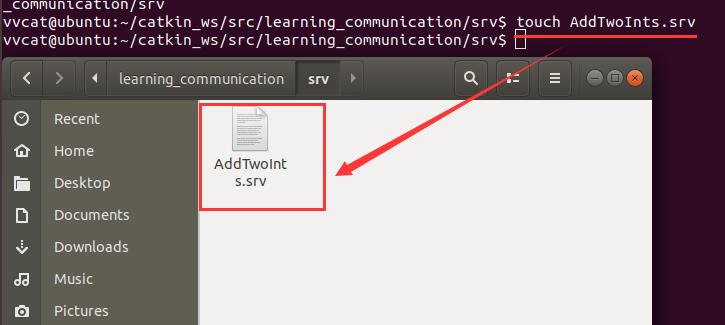
创建 AddTwoInts.srv 文件
cd ~/catkin_ws/src/learning_communication/srv
touch AddTwoInts.srv
AddTwoInts.srv 文件内容
int64 a
int64 b
---
int64 sum
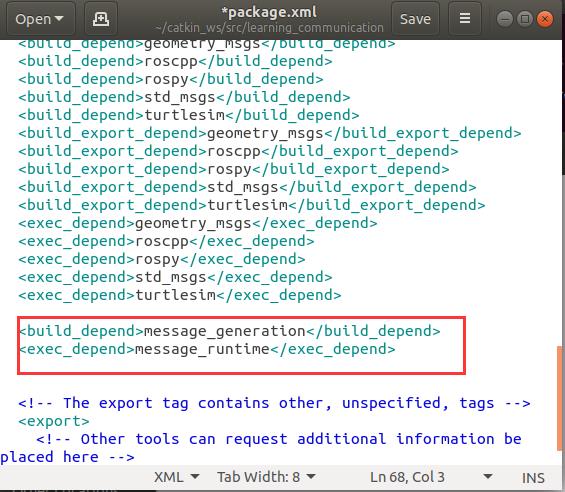
在package.xml中添加功能包依赖
<build_depend>message_generation</build_depend>
<exec_depend>message_runtime</exec_depend>
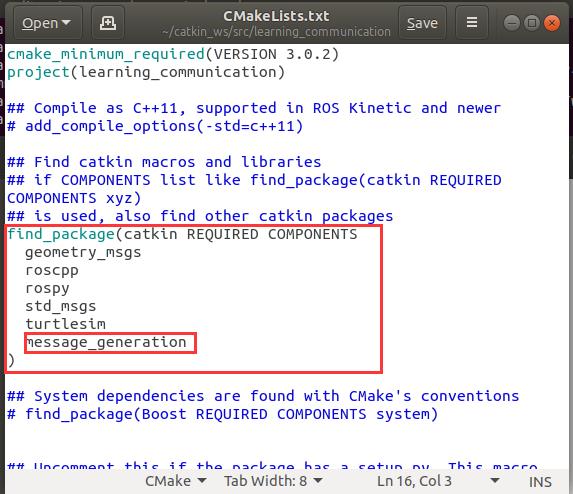
在CMakeLists.txt添加编译选项
find_package(catkin REQUIRED COMPONENTS
......
......
message_generation
)
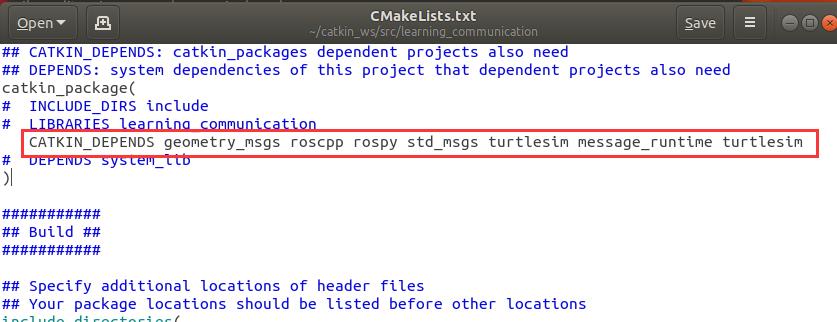
catkin_package(
# INCLUDE_DIRS include
# LIBRARIES learning_topic
CATKIN_DEPENDS geometry_msgs roscpp rospy std_msgs turtlesim message_runtime
# DEPENDS system_lib
)
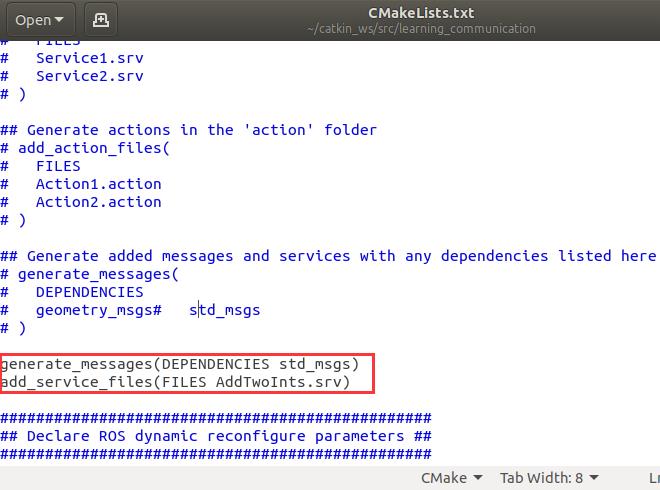
add_service_files(FILES AddTwoInts.srv)
generate_messages(DEPENDENCIES std_msgs)
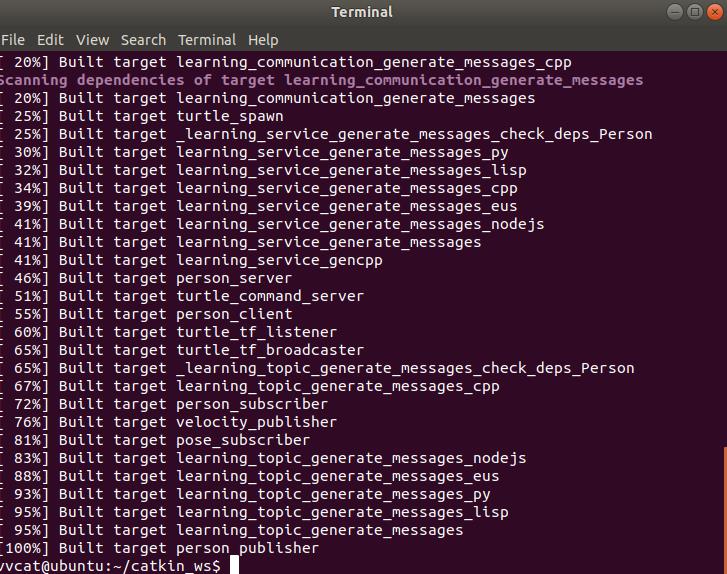
配置完成后,对工程目录进行编译
cd ~/catkin_ws
catkin_make
通过以下代码去调用生成的头文件
在 src 目录下创建 两个 cpp文件
cd ~/catkin_ws/src/learning_communication/src
创建 server.cpp 文件
touch server.cpp
以下是server.cpp 文件中的内容
代码功能:将输入参数中的请求数据相加,结果放到应答变量中
#include <ros/ros.h>
#include "learning_communication/AddTwoInts.h"
// service回调函数,输入参数req,输出参数res
bool add(learning_communication::AddTwoInts::Request &req,
learning_communication::AddTwoInts::Response &res)
{
// 将输入参数中的请求数据相加,结果放到应答变量中
res.sum = req.a + req.b;
ROS_INFO("request: x=%ld, y=%ld", (long int)req.a, (long int)req.b);
ROS_INFO("sending back response: [%ld]", (long int)res.sum);
return true;
}
int main(int argc, char **argv)
{
// ROS节点初始化
ros::init(argc, argv, "add_two_ints_server");
// 创建节点句柄
ros::NodeHandle n;
// 创建一个名为/show_person的server,注册回调函数personCallback
ros::ServiceServer service = n.advertiseService("/add_two_ints", add);
// 循环等待回调函数
ROS_INFO("Ready to add two ints.");
ros::spin();
return 0;
}
创建 client.cpp 文件
touch client.cpp
client.cpp 文件中的内容
代码功能:发布service请求,等待加法运算的应答结果
#include <cstdlib>
#include <ros/ros.h>
#include "learning_communication/AddTwoInts.h"
int main(int argc, char** argv)
{
// 初始化ROS节点
ros::init(argc, argv, "add_two_ints_client");
// 从终端命令行获取两个加数
if (argc != 3){
ROS_INFO("usage: add_two_ints_client X Y");
return 1;
}
// 创建节点句柄
ros::NodeHandle n;
// 创建一个client,请求add_two_int service, service消息类型是 learning_communication::AddTwoInts
ros::ServiceClient client = n.serviceClient<learning_communication::AddTwoInts>("add_two_ints");
// 创建learning_communication::AddTwoInts类型的service消息
learning_communication::AddTwoInts srv;
srv.request.a = atoll(argv[1]);
srv.request.b = atoll(argv[2]);
// 发布service请求,等待加法运算的应答结果
if (client.call(srv)){
ROS_INFO("Sum: %ld", (long int)srv.response.sum);
}else{
ROS_ERROR("Failed to call service add_two_ints");
return 1;
}
return 0;
};
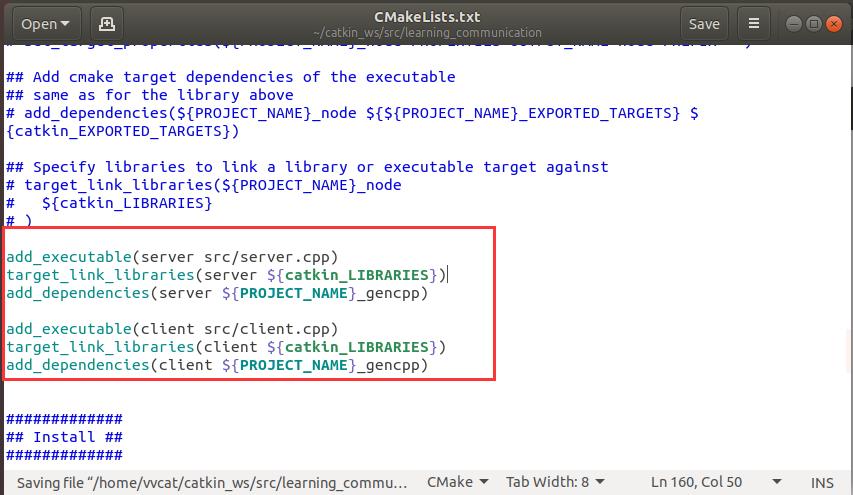
在CMakeLists.txt文件中添加以下代码:
add_executable(server src/server.cpp)
target_link_libraries(server ${catkin_LIBRARIES})
add_dependencies(server ${PROJECT_NAME}_gencpp)
add_executable(client src/client.cpp)
target_link_libraries(client ${catkin_LIBRARIES})
add_dependencies(client ${PROJECT_NAME}_gencpp)
编译工程项目
cd ~/catkin_ws
catkin_make
启动ROS Master
roscore
启动自定义的订阅者节点
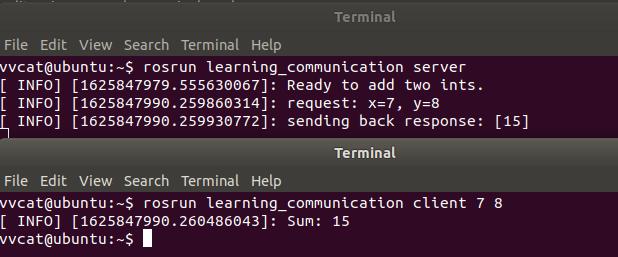
rosrun learning_communication server
启动自定义的发布者节点
rosrun learning_communication client 7 8
Client启动后发布服务请求,并成功接收到反馈结果。
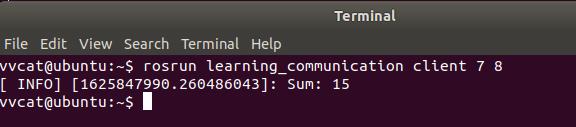
Server接收到服务调用后完成加法求解,并将结果反馈给Client。
以上是关于ROS系统 通过服务编程实现两个数相加并返回的主要内容,如果未能解决你的问题,请参考以下文章