ROS系统 创建工作空间与功能包
Posted ʚVVcatɞ
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ROS系统 创建工作空间与功能包相关的知识,希望对你有一定的参考价值。
工作空间是一个存放工程开发相关文件的文件夹。
- src:代码空间
- build:编译空间
- devel:开发空间
- install:安装空间
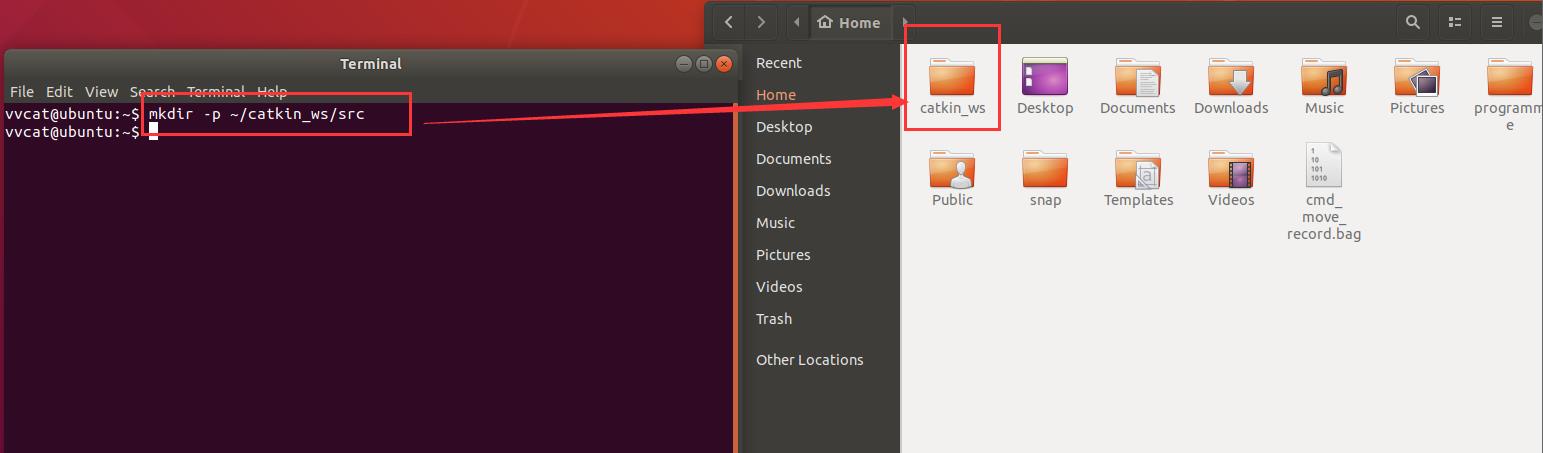
创建工作空间
mkdir -p ~/工作空间名称/src
例如:创建一个名称为 catkin_ws 的工作空间
mkdir -p ~/catkin_ws/src
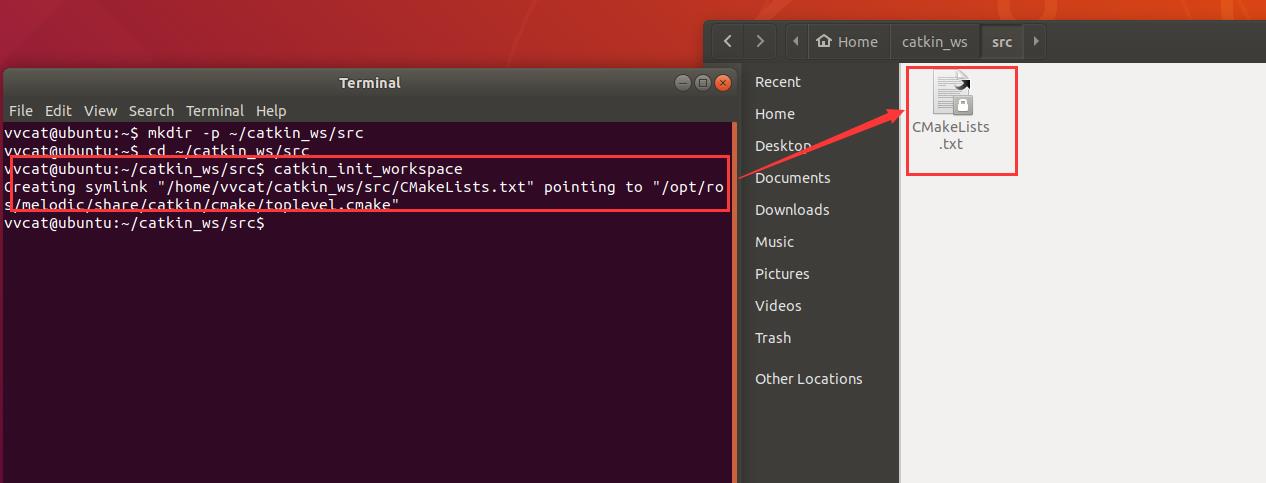
进入到创建的catkin_ws工程目录中
cd ~/catkin_ws/src
将当前文件夹进行属性初始化。
catkin_init_workspace
会在src目录中生成一个 CMakeLists.txt 文件,生成这个文件说明当前路径已经是ROS的工作空间了。
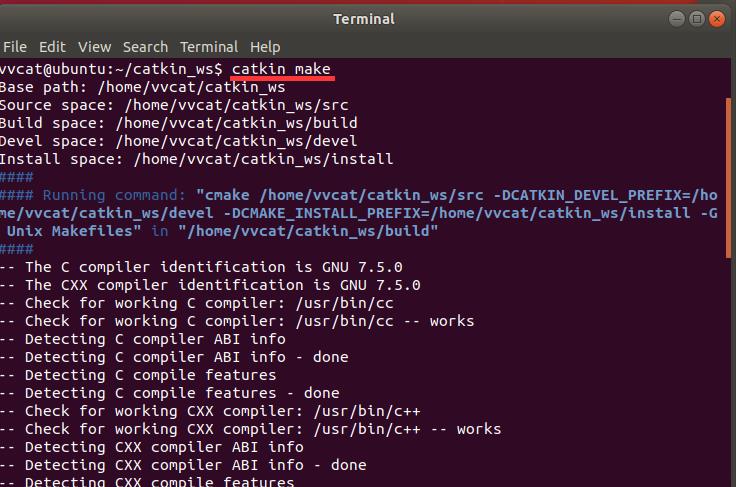
编译工作空间
注:在编译工作空间时,需要在工作空间的根目录执行编译命令。
cd ~/catkin_ws/

编译工作空间下所有功能包的源码。
catkin_make
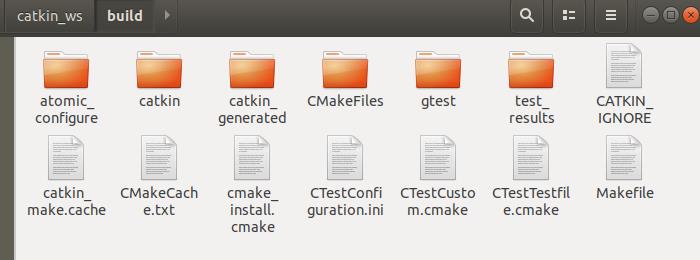
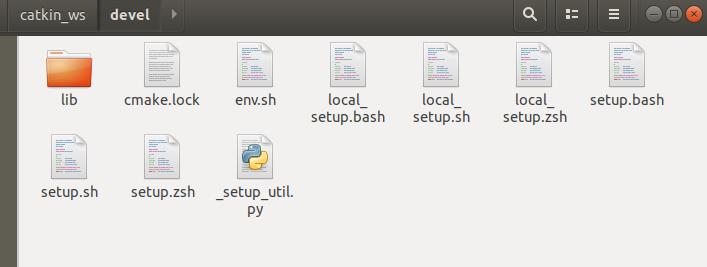
编译完成后会生成 build 和 devel文件夹。
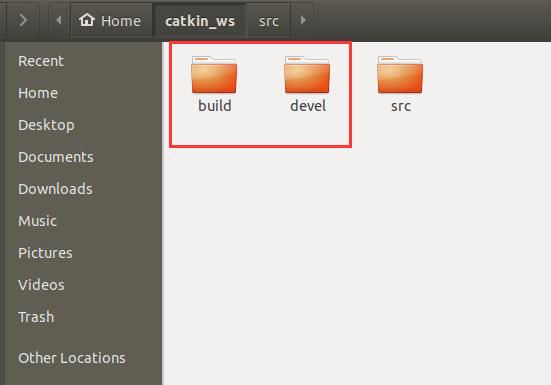
build文件夹中的内容,存放编译的二进制文件。
devel文件夹中的内容,存放开发中的可执行文件和库
此时还缺少一个 install 文件夹,需要执行以下指令,便可自动生一个 install 文件夹。
catkin_make install
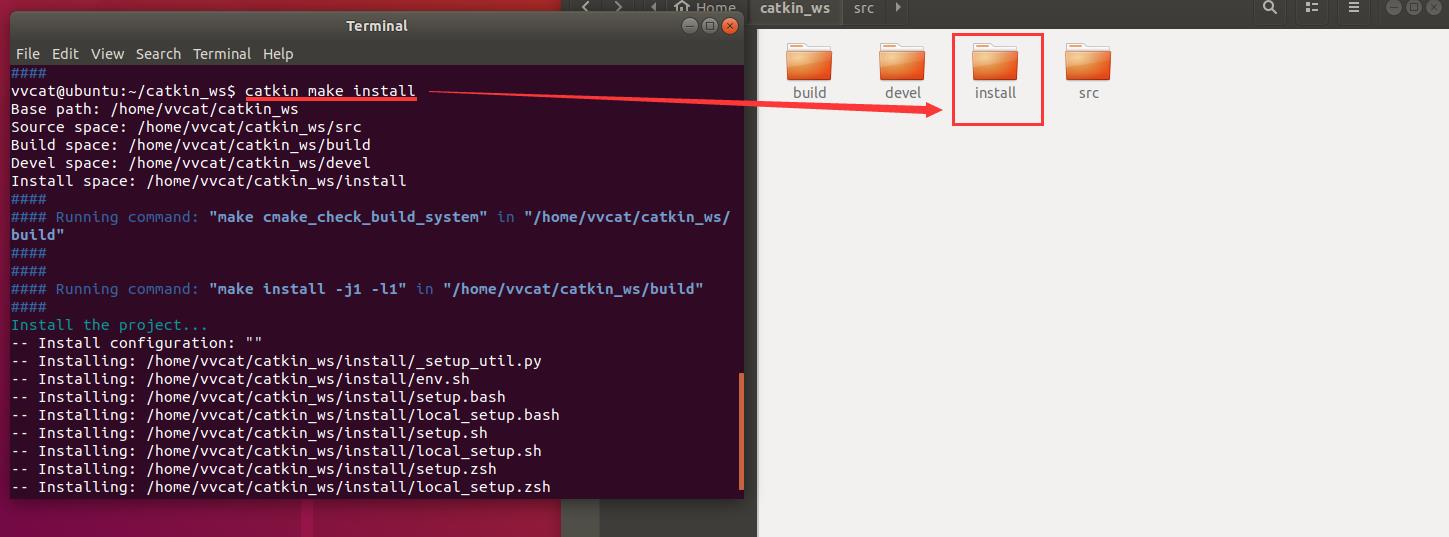
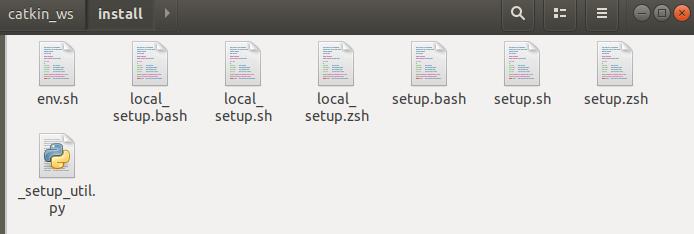
install 文件夹中的内容,用来存放着编译后的可执行文件。
catkin_create_pkg<package_name>[depend1][depend2][depend3]
创建功能包
cd ~/catkin_ws/src

catkin_create_pkg test_pkg std_msgs rospy roscpp
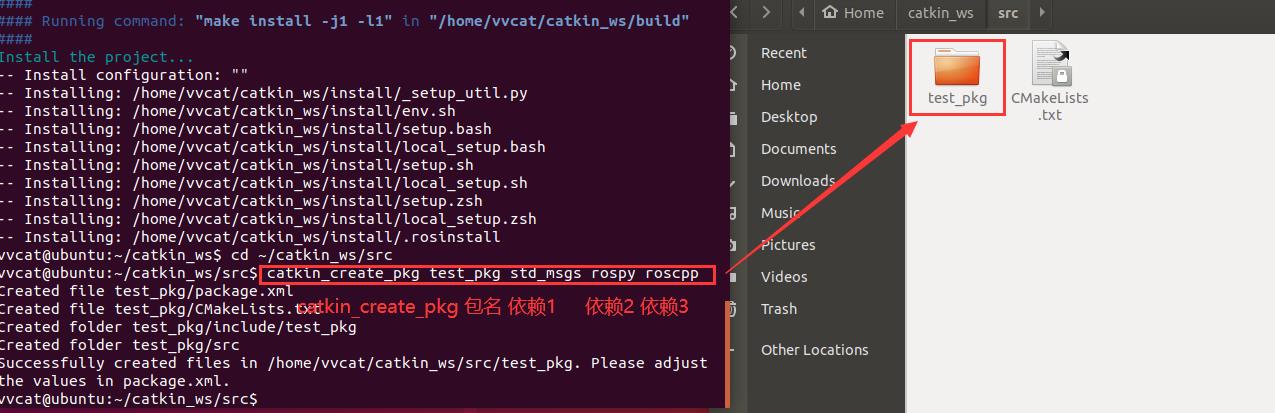
test_pkg中的内容
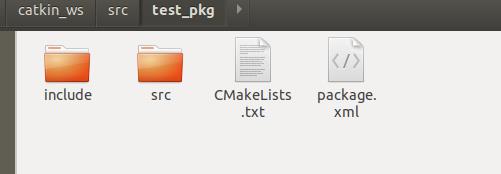
- src:存放自己写的源码。
- include:C++代码头文件,可以存放在这里
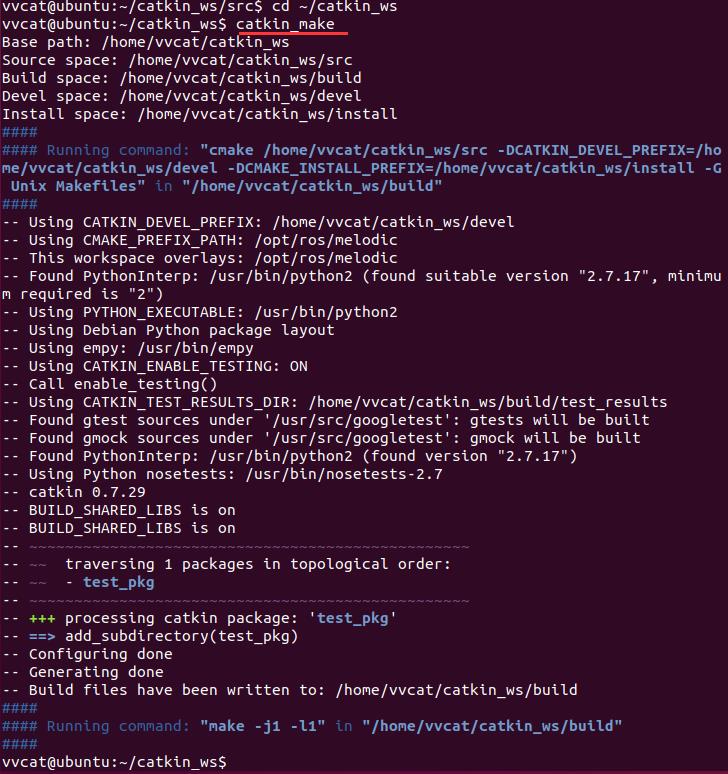
cd ~/catkin_ws
再次编译工作空间。
catkin_make
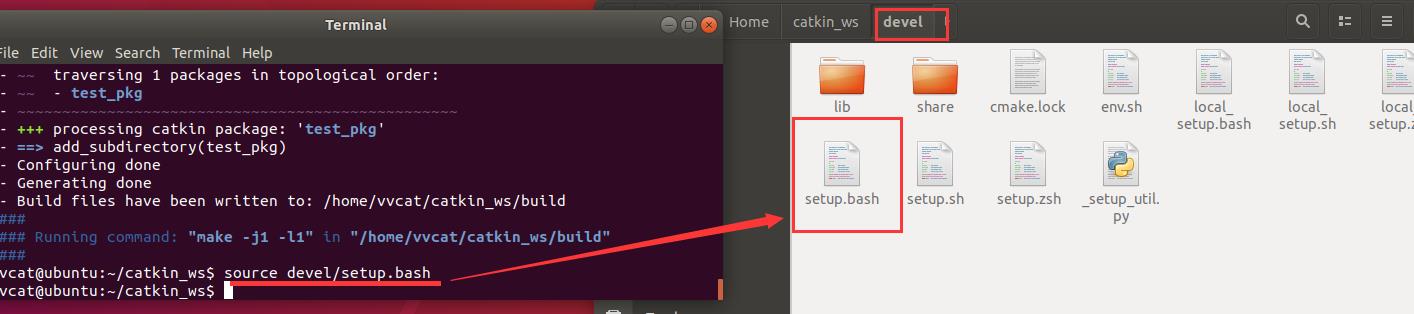
设置环境变量,让系统能够找到该工作空间
source devel/setup.bash
或
source ~/catkin_ws/devel/setup.bash
以上两种方式都可以设置环境变量
检查环境变量
echo $ROS_PACKAGE_PATH

注意:
- 同一个工作空间下,不允许存在同名功能包
- 不同工作空间下,允许存在同名功能包。
以上是关于ROS系统 创建工作空间与功能包的主要内容,如果未能解决你的问题,请参考以下文章