04-拉格朗日对偶问题和KKT条件
Posted 二十三岁的有德
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了04-拉格朗日对偶问题和KKT条件相关的知识,希望对你有一定的参考价值。
04-拉格朗日对偶问题和KKT条件
凸优化从入门到放弃完整教程地址:https://www.cnblogs.com/nickchen121/p/14900036.html
一、拉格朗日对偶函数
[题设] 考虑以下标准形式的优化问题:
\\(\\begin{aligned} \\text{minimize} \\quad & f_0(x) \\\\ \\text{s.t.} \\quad & f_i(x)\\leq 0, i=1,...,m \\\\ &h_i(x)=0, i=1,...,p \\end{aligned}\\)
- 其中 \\(x\\in R^n\\) ,设值域 \\(D=\\cap^m_{i=0}dom~f_i\\cap^p_{i=1}dom~h_i\\) 不为空。
- 最优值记为 \\(p^*\\) ,不假设这个问题是凸的。
- 拉格朗日对偶:通过添加约束的加权和来增广目标函数。
[拉格朗日函数] 定义拉格朗日函数 \\(L: R^n\\times R^m\\times R^p\\rightarrow R\\) 为
注:大概知道拉格朗日函数的构造形式即可,下面在拉个朗日对偶问题中会详细叙述它的作用
\\(L(x,\\lambda,v)=f_0(x)+\\sum^m_{i=1}\\lambda_i f_i(x) +\\sum^p_{i=1}v_ih_i(x).\\)
- 值域: \\(dom~L=D\\times R^m \\times R^p.\\)
- 拉格朗日乘子:记 \\(\\lambda_i\\) 是第 \\(i\\) 个不等式约束 \\(f_i(x)\\leq 0\\) 的拉格朗日乘子; \\(v_i\\) 是第 \\(i\\) 个等式约束 \\(h_i(x)=0\\) 的拉格朗日乘子。
- 乘子向量:向量 \\(\\lambda\\) 和 \\(v\\) 称为对偶变量,或该问题的拉格朗日乘子向量。
[拉格朗日对偶函数] 定义拉格朗日对偶函数(或对偶函数) \\(g:R^m\\times R^p\\rightarrow R\\) 为拉格朗日函数关于 \\(x\\) 取得的最小值:对于 \\(\\lambda\\in R^m, v\\in R^p\\)
\\(g(\\lambda,v)=inf_{x\\in D} L(x,\\lambda,v)\\)
注:上面为什么用 \\(\\inf\\) 这个函数,因为解可能是趋向于一个值,而不是一个具体的值
- 如果关于 \\(x\\) 无下界,那么对偶函数取值 \\(-\\infty.\\)
- 对偶函数是凹的:因为对偶函数是一组关于 \\((\\lambda,v)\\) 的仿射函数的逐点下确界,所以即使题设是凸的,对偶函数也是凹的
[最优值的下界] 对偶函数给出最优值 \\(p^*\\) 的下界: \\(g(\\lambda,v)\\leq p^*\\) , \\(\\forall \\lambda\\succeq 0, \\forall v.\\)
二、拉格朗日对偶问题
[拉格朗日对偶问题] 拉格朗日函数能给出的最好下界:
\\(\\begin{aligned} \\text{maxmize} \\quad &g(\\lambda,v) \\\\ \\text{s.t.} \\quad & \\lambda\\succeq 0 \\end{aligned}\\)
注:这里解释下为什么要这样构造拉格朗日对偶问题,首先明确拉格朗日函数的作用:因为约束条件对定义域有着很大的限制,因此通过拉格朗日函数的形式去除优化问题的约束条件,取消约束限制对定义域的限制,让优化问题更容易求解,那为什么这样做有用呢?
我们可以这样来看拉格朗日函数 \\(L(x,\\lambda,v)=f_0(x)+\\sum^m_{i=1}\\lambda_i f_i(x) +\\sum^p_{i=1}v_ih_i(x).\\) ,其中由于约束条件 \\(h_i(x)=0\\) 进而 \\(\\sum^p_{i=1}v_ih_i(x) = 0\\),并且如果 \\(\\lambda_i \\geq 0\\) 且 \\(f_i(x)\\leq 0\\) 进而 $\\sum^m_{i=1}\\lambda_i f_i(x) \\leq 0 $,也就是说 \\(L(x,\\lambda,v) \\leq f_0(x)\\)。
原问题是去寻找 \\(f_0(x)\\) 的最小值,那么通过上述的分析,我们是不是可以找到 \\(L(x,\\lambda,v)\\) 的最小值去作为 \\(f_0(x)\\) 的最小值呢?可以的,只不过稍微有点误差而已,但是我们却轻松地解决了带约束问题的优化问题。
为此,为了减小这个误差,我们进而又想找到 \\(L(x,\\lambda,v)\\) 的最小值中的最大值,也就有了 \\(g(\\lambda,v)\\),最重要的还是,无论原问题是否为凸问题,\\(g(\\lambda,v)\\) 都是一个凹函数。
- 上述称为拉格朗日对偶问题,也称原问题(primal problem)。
- 对偶可行:满足 \\(\\lambda\\succeq 0\\) , \\(g(\\lambda,v)>-\\infty\\) 称为对偶可行的。
- 对偶最优解(最优拉格朗日乘子):记 \\((\\lambda^*,v^*)\\) 为对偶问题的最优解。
- 拉格朗日对偶问题是凸优化问题:因为目标函数是凹函数,约束集合是凸集。
另一方面,由于不论原函数是否为凸优化问题,新的问题都是凸的,因此可以方便求解。下面举几个例子。
[例子 1]:原问题为
\\(\\begin{aligned} \\text { minimize } \\quad& x^Tx\\\\ \\text { s.t. } \\quad& Ax=b \\end{aligned} \\\\\\)
那么可以很容易得到拉格朗日函数为 \\(L(x,\\nu)=x^Tx+\\nu^T(Ax-b)\\),对偶函数为 \\(g(\\nu)=-(1/4)\\nu^TAA^T\\nu-b^T\\nu\\),也即
\\(p^\\star\\ge g(\\nu)\\)。
[例子 2]:标准形式的线性规划(LP)
\\(\\begin{aligned} \\text { minimize } \\quad& c^Tx\\\\ \\text { s.t. } \\quad& Ax=b,\\quad x\\succeq0 \\end{aligned} \\\\\\)
按照定义容易得到对偶问题为
\\(\\begin{aligned} \\text { maximize } \\quad& -b^T\\nu\\\\ \\text { s.t. } \\quad& A^T\\nu+c\\succeq0 \\end{aligned} \\\\\\)
[例子 3]:原问题为最小化范数
\\(\\begin{aligned} \\text { minimize } \\quad& \\Vert x\\Vert\\\\ \\text { s.t. } \\quad& Ax=b \\end{aligned} \\\\\\)
对偶函数为
\\(g(\\nu)=\\inf_{x} (\\Vert x\\Vert+\\nu^T(b-Ax)) =\\begin{cases}b^T\\nu & \\Vert A^T\\nu\\Vert_* \\le1 \\\\ -\\infty & o.w.\\end{cases} \\\\\\)
这个推导过程中用到了共轭函数的知识。实际上上面三个例子都是线性等式约束,这种情况下,我们应用定义推导过程中可以很容易联想到共轭函数。(实际上加上线性不等式约束也可以)
[例子 4]:(原问题非凸)考虑 Two-way partitioning (不知道怎么翻译了...)
\\(\\begin{aligned} \\text { minimize } \\quad& x^TWx\\\\ \\text { s.t. } \\quad& x_i^2=1,\\quad i=1,...,n \\end{aligned} \\\\\\)
对偶函数为
\\(\\begin{aligned} g(\\nu)=\\inf_{x}\\left( x^{T}(W+\\operatorname{diag}(\\nu)) x \\right)-\\mathbf{1}^{T} \\nu =\\left\\{\\begin{array}{ll} -\\mathbf{1}^{T} \\nu & W+\\operatorname{diag}(\\nu) \\succeq 0 \\\\ -\\infty & \\text { otherwise } \\end{array}\\right. \\end{aligned} \\\\\\)
于是可以给出原问题最优解的下界为 \\(p^\\star\\ge-\\mathbf{1}^{T} \\nu\\) if \\(W+\\operatorname{diag}(\\nu) \\succeq 0\\)。这个下界是不平凡的,比如可以取 \\(\\nu=-\\lambda_{\\min}(W)\\mathbf{1}\\),可以给出 \\(p^\\star\\ge n\\lambda_{\\min}(W)\\)。
注:弱强对偶的区别,简单点说,就是我们从对偶函数 \\(g(\\lambda,v)\\) 找到的最大值是否为原函数 \\(f_0(x)\\) 的最优解,也就是通过对偶问题求解之后,对偶问题的解和真实问题的解有没有误差
[弱对偶性] 对偶问题的最优值记为 \\(d^{*}\\) , 是从对偶函数中得到的 \\(p^{*}\\) 的最优下界,因此不等式
\\(d^{*}\\leq p^{*}\\) 成立即使最初问题不是凸的。这个性质称为弱对偶性。
- 最优对偶间隙: \\(p^{*}-d^{*}\\)
[强对偶性] 如果等式 \\(d^{*}=p^{*}\\) 成立,即最优对偶间隙为零,那么强对偶性成立。注:如果原问题为凸优化问题,一般情况下都成立。
- 强对偶性成立的条件:约束准则(constraint qualifications)
[Slater\'s constraint qualifications(SCQ)条件] 存在 \\(x\\in relint~D\\) (relint指相对内部)使得 \\(f_i(x)<0, i=1,...,m\\) , \\(Ax=b.\\)
注:Slater 条件,如果简单说,就是看 \\(f_i(x) \\lt 0\\) 是否严格满足
- 这样的点称为严格可行点。
- Slater定理说明如果Slater 条件成立(且原始问题是凸问题),那么强对偶性成立。
- 由于存在线性等式约束,因此实际定义域可能不存在内点,可以将这一条件放松为相对内点 \\(x\\in\\text{relint}\\mathcal{D}\\);
- 如果不等式约束中存在线性不等式,那么他也不必严格小于0。也即如果 \\(f_i(x)=C^Tx+d\\),则只需要满足 \\(f_i(x)\\le0\\) 即可。
三、强弱对偶的几何解释
[弱对偶性] 令集合 \\(\\mathcal{G}\\) 是目标函数和约束函数的值的集合
注:看下面图片去理解的时候,需要注意,图片的阴影面积是目标函数和约束函数的值的集合,是一个集合,然后通过下面的叙述,就是从集合中找到一个支撑超平面,然后注意一些限制条件,比如\\(u\\preceq 0\\), 就可以看出\\(p^*\\) 为什么是在那里了
\\(\\mathcal{G}=\\{(f_1(x),...,f_m(x),h_1(x),...,h_p(x),f_0(x) )\\in R^m\\times R^p\\times R| x\\in D\\}\\)
\\(p^{*}=inf\\{t| (u,v,t)\\in \\mathcal{G},u\\preceq 0, v=0 \\}\\)
为了得到关于 \\((\\lambda,\\mathcal{v})\\) 的对偶函数,我们最小化仿射函数: \\((u,v,t)\\in \\mathcal{G},\\)
\\((\\lambda,\\mathcal{v},1)^T(u,v,t)=\\sum^m_{i=1}\\lambda_i u_i +\\sum^p_{i=1}\\mathcal{v}_iv_i+t\\)
即对偶函数为:
\\(g(\\lambda,\\mathcal{v})=inf\\{(\\lambda,\\mathcal{v},1)^T(u,v,t)|(u,v,t)\\in \\mathcal{G}\\}\\)
如果下确界是有限的,那么
\\((\\lambda,\\mathcal{v},1)^T(u,v,t)\\geq g(\\lambda,\\mathcal{v})\\)
这定义了一个 \\(\\mathcal{G}\\) 的支撑超平面(以 \\((\\lambda,\\mathcal{v},1)\\) 为法向量且与 \\(\\mathcal{G}\\) 在下方相切)。它是非垂直的。
假设 \\(\\lambda\\succeq 0\\) ,如果 \\(u\\preceq 0\\) 且 \\(v=0\\) ,那么 \\(t\\geq (\\lambda,\\mathcal{v},1)^T(u,v,t).\\) 因此,
\\(p^*\\geq g(\\lambda,\\mathcal{v}).\\)
即得到了弱对偶性。
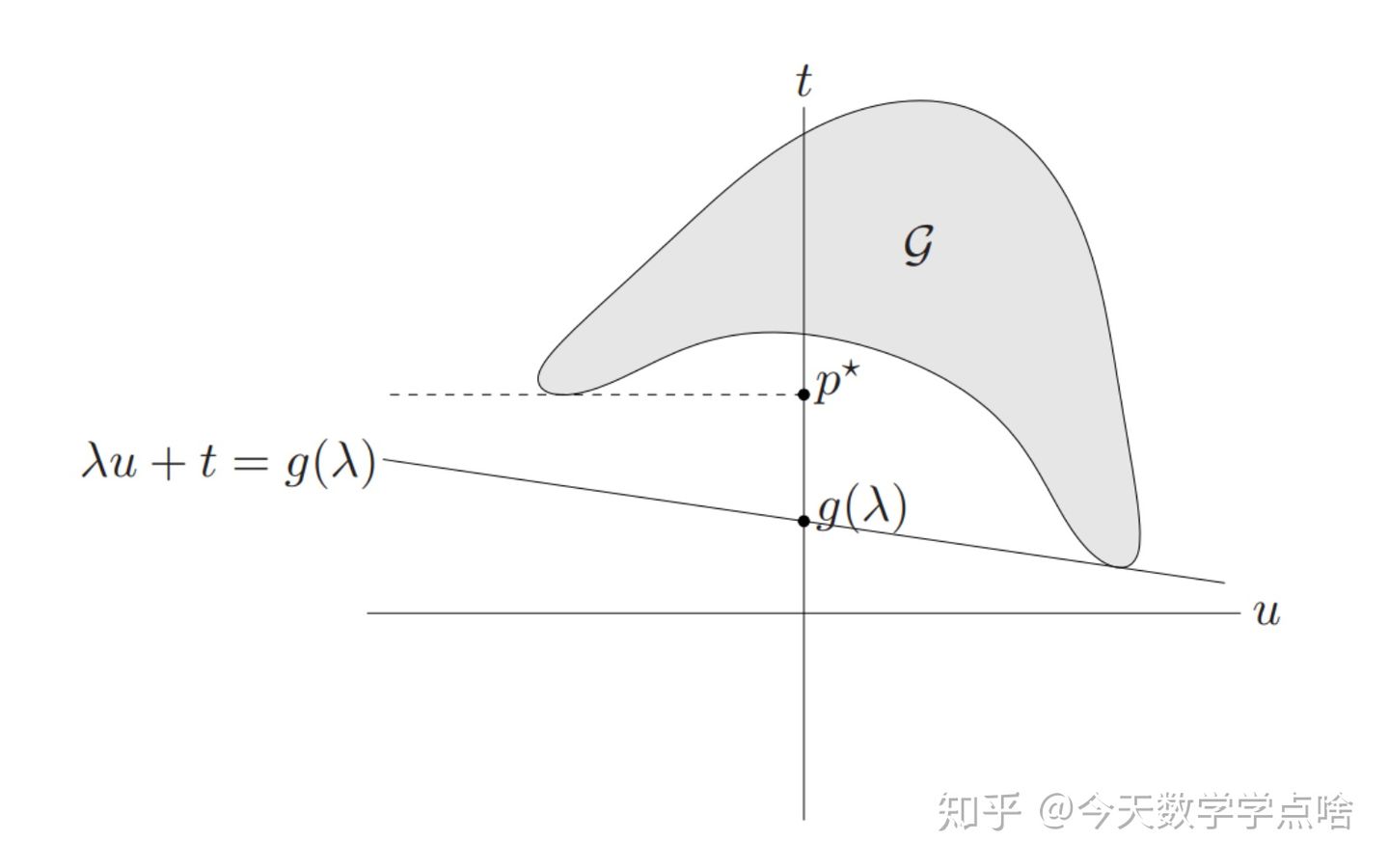
- 如图1,对于 \\(\\mathcal{G}=\\{(f_1(x),f_0(x))|x\\in D\\}\\) ,给定一个 \\(\\lambda\\) ,然后在 \\(\\mathcal{G}\\) 范围内最小化 \\((\\lambda,1)^T(u,t)\\) ,得到一个斜率为 \\(-\\lambda\\) 的支撑超平面 \\(t=-\\lambda u+g(\\lambda)\\) , \\(g(\\lambda)\\) 位于 \\(p^{*}\\) 的下方。注:由于 \\(g(\\lambda) = t + \\lambda u\\),可以得知 \\(g(\\lambda)\\) 就是 \\(t\\) 轴的交点,也就相当于截距。
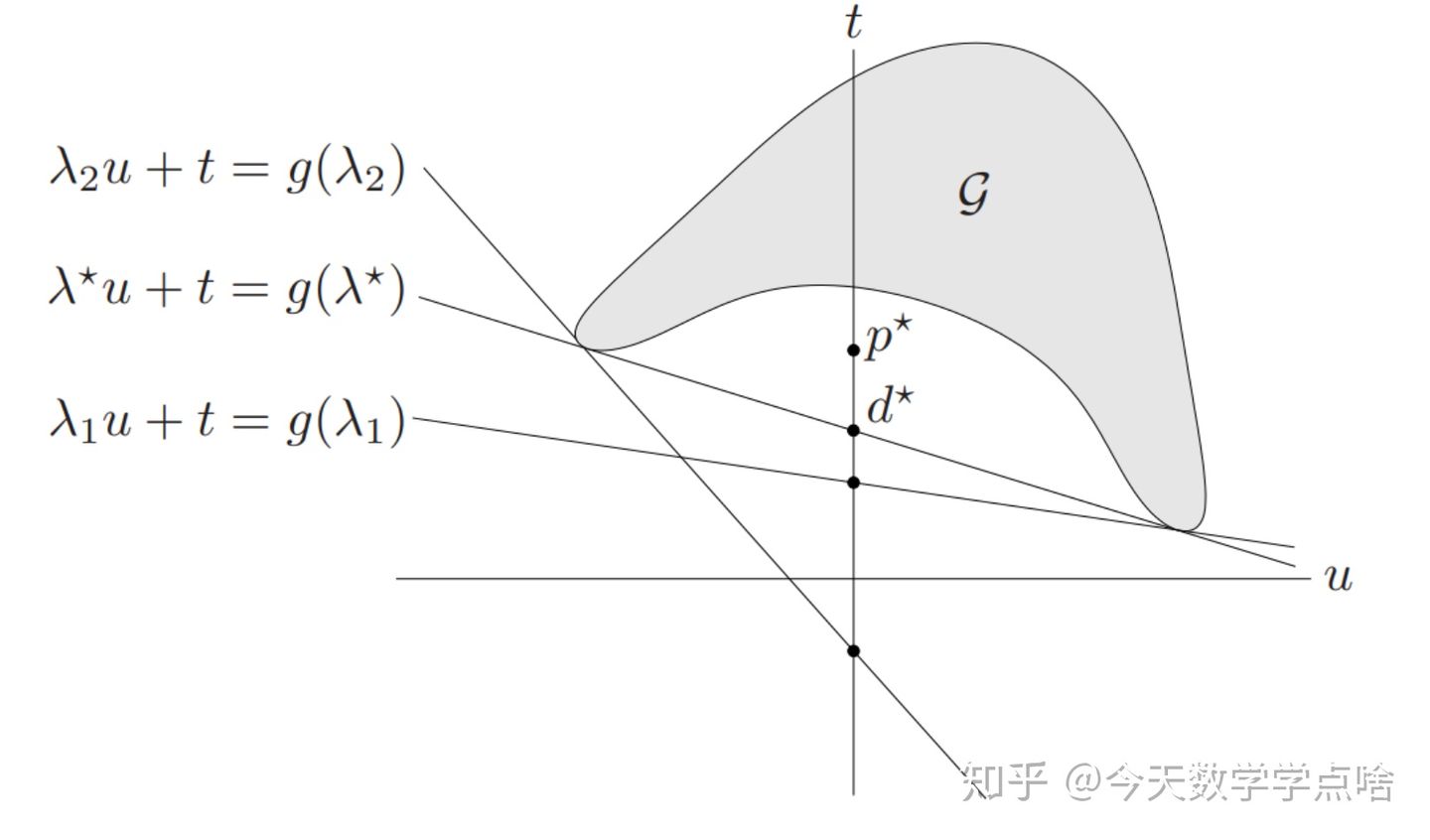
- 为了最大化 \\(g(\\lambda)\\) ,给 \\(\\lambda\\) 取不同的值, 如图2,即使是最优的 \\(\\lambda^{*}\\) ,给出的 \\(d^{*}\\) 也在 \\(p^{*}\\) 的下方,所以不满足强对偶性,只有弱对偶性。注:可以把这看成是一个迭代的过程
注:再次讲讲 \\(p^*\\) 的来源,那么 \\(p^\\star\\) 体现在哪个点呢?由于对于原优化问题,我们有 \\(f_1(x)\\le0\\),因此体现在这个图里面就是 \\(u\\le0\\),也就是上面左图当中的红色区域,而 \\(p^\\star=\\min f_0(x)=\\min t\\)。
[弱对偶性的证明]:我们有 \\(\\lambda\\ge0\\)
\\(\\begin{aligned} p^\\star &= \\inf\\{t|(u,v,t)\\in\\mathcal{G},u\\le0,v=0\\} \\\\ &\\ge \\inf\\{t+\\lambda^Tu+\\mu^Tv|(u,v,t)\\in\\mathcal{G},u\\le0,v=0\\} \\\\ &\\ge \\inf\\{t+\\lambda^Tu+\\mu^Tv|(u,v,t)\\in\\mathcal{G}\\} \\\\ &= g(\\lambda,\\mu) \\end{aligned} \\\\\\)
[强对偶性条件 Slater’s constraint qualification(SCQ) 的证明]:由 \\(g(\\lambda,\\mu)=\\inf_{(u,v,t)\\in\\mathcal{G}}(t+\\lambda^T u+\\mu^Tv)\\) 可以得到
\\((\\lambda,\\mu,1)^T(u,v,t)\\ge g(\\lambda,\\mu),\\quad \\forall (u,v,t)\\in\\mathcal{G} \\\\\\)
这实际上定义了 \\(\\mathcal{G}\\) 的一个超平面。特别的有 \\((0,0,p^\\star)\\in\\text{bd}\\mathcal{G}\\),因此也有
\\((\\lambda,\\mu,1)^T(0,0,p^\\star)\\ge g(\\lambda,\\mu) \\\\\\)
这个不等式可以自然地导出弱对偶性,当“=”成立时则可以导出强对偶性。那么什么时候取等号呢?点 \\((0,0,p^\\star)\\) 为支撑点的时候!也就是说
如果在边界点 \\((0,0,p^\\star)\\) 处存在一个非竖直的支撑超平面,那么我们就可以找到 \\(\\lambda,\\mu\\) 使得上面的等号成立,也就是得到了强对偶性。
注意前面的分析中我们并没有提到 SCQ,那么 SCQ 是如何保证强对偶性的呢?注意 SCQ 要求存在 \\(x\\in\\mathcal{D}\\) 使得 \\(f(x)<0\\),这也就意味着 \\(\\mathcal{G}\\) 在 \\(u< 0\\) 半平面上有点,因此如果支撑超平面存在的话,就一定不是垂直的。
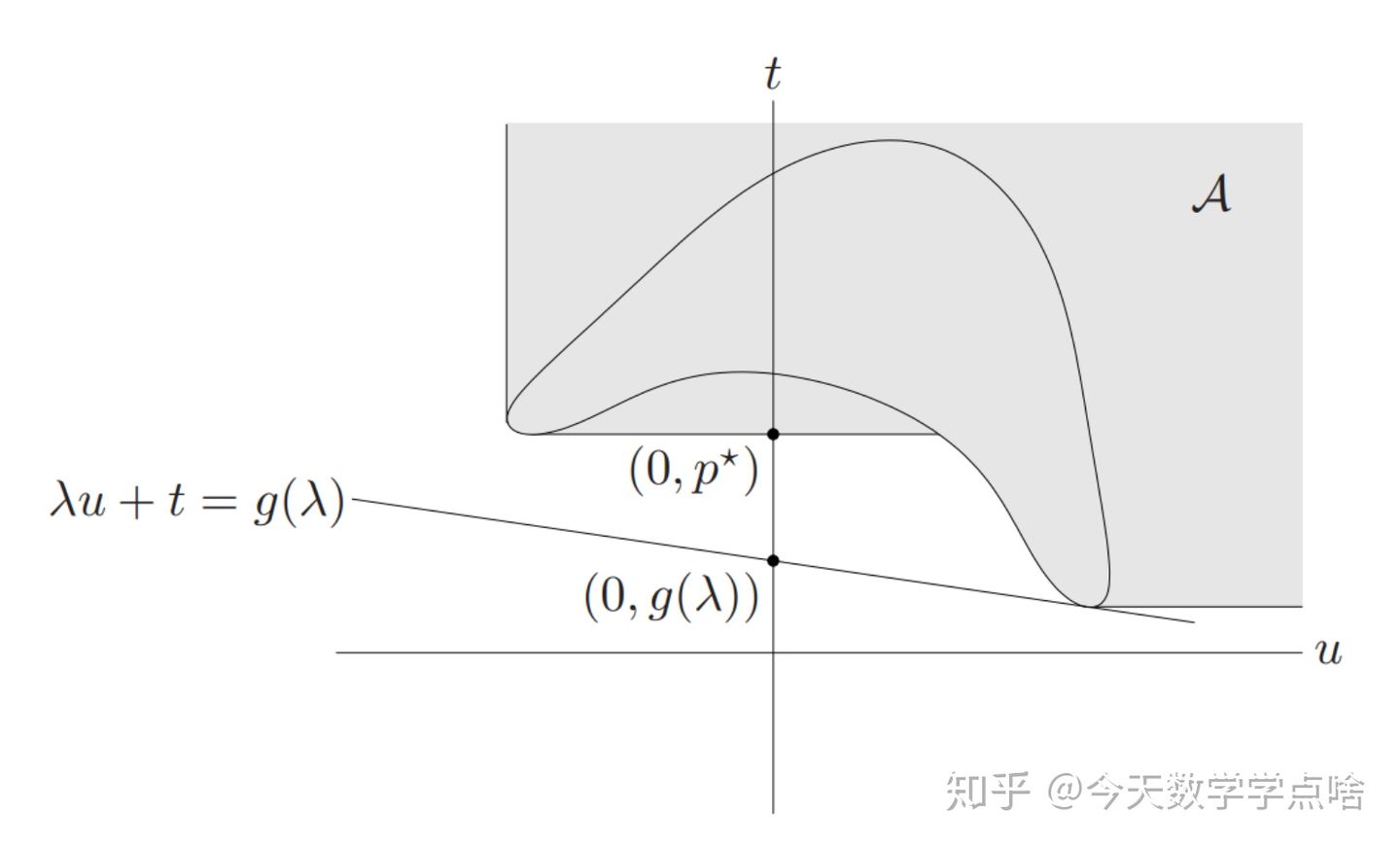
但这又引出另一个问题,那就是支撑超平面一定存在吗?答案是一定存在,这是由原问题的凸性质决定的。为了证明这一点,我们可以引入一个类似于 epigraph 的概念:
\\(\\begin{aligned} \\mathcal{A} &= \\mathcal{G} + (R^m_+\\times \\{0\\}\\times R_+) \\\\ &= \\left\\{(u,v,t) |\\ \\exists x\\in\\mathcal{D},s.t. f(x)\\le u,h(x)=v,f_0(x)\\le t\\right\\} \\end{aligned} \\\\\\)
由于原优化问题为凸的,可以应用定义证明集合 \\(\\mathcal{A}\\) 也是凸的,同时 \\((0,0,p^\\star)\\in\\text{bd}\\mathcal{A}\\),那么集合 \\(\\mathcal{A}\\) 在 \\((0,0,p^\\star)\\) 点就一定存在一个支撑超平面。又由 SCQ 可知这个支撑超平面一定不是竖直的,因此就可以得到强对偶性了。
注:\\((\\lambda,\\mu,1)^T(u,v,t)\\ge g(\\lambda,\\mu),\\quad \\forall (u,v,t)\\in\\mathcal{A}\\) 也成立。
注:说实话,这里我也有点半知半解,数学公式看的太乱了,反正要注意,\\(u\\) 相当于 \\(f_i(x)\\),\\(v\\) 相当于 \\(h_i(x)\\)。我只能说说我浅显的理解,就是从图中看,确保坐标轴 \\(u\\) 的负半轴有一个支撑超平面,且这个支撑超平面不是垂直的,那么 \\(p^* \\geq d^*\\) 就被保证了。
四、鞍点解释
4.1 鞍点的基础定义
[鞍点定义]:一个不是局部最小值的驻点(一阶导数为0的点)称为鞍点。注:鞍点的数学含义是——目标函数在此点上的梯度(一阶导数)值为 0, 但从该点出发的一个方向是函数的极大值点,而在另一个方向是函数的极小值点。
[判断鞍点的一个充分条件]:函数在一阶导数为零处(驻点)的黑塞矩阵为不定矩阵(特征值有正有负的矩阵为不定矩阵)。
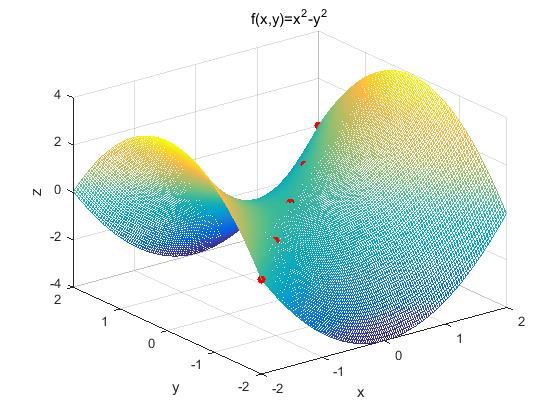
下面对函数 \\(z=x^2-y^2\\) 的驻点 \\((0,0)\\) 判断是否为鞍点。函数图像如下(红点为图像的鞍点):
我们根据定义来判断 \\((0,0)\\) 点的 Hessian 矩阵:
我们容易求得二元函数 \\(z=x^2−y^2\\) 在驻点 $ (0,0) $ 处的 Hessian 矩阵形式为:

容易解出特征值一个为 \\(2\\),一个为 \\(-2\\)(有正有负),显然是不定矩阵,所以该点是鞍点。
注:函数在一阶导数为零处(驻点)的 Hessian 矩阵为不定矩阵只是判断该点是否为鞍点的充分条件,也就是说函数在一阶导数为零处(驻点)的 Hessian 矩阵不满足不定矩阵的定义,也不一定能够说明它不是鞍点。比如在 \\(z=x^4−y^4\\) 点 $ (0,0)$ 处的 Hessian 矩阵是一个 0 矩阵,并不满足是不定矩阵,但是它是一个鞍点。
4.2 极大极小不等式和鞍点性质
[极大极小不等式]:对任意 \\(f\\) :\\(R^n × R^m \\rightarrow R,\\quad W \\subseteq R^n Z \\subseteq R^m\\),有
对于上述这个不等式一般称为极大极小不等式。如果等式成立,即
则称 \\(f\\)(以及 \\(W\\) 和 \\(Z\\))满足强极大极小性质或者鞍点性质。
[鞍点性质]:注:这个解释更多的是为了下面讲述 KKT 条件,其实就是注意下这个强极大极小性质就是鞍点性质
我们称一对 \\(\\hat w \\in W, \\hat z \\in Z\\) 是函数 \\(f\\) (以及 \\(W\\) 和 \\(Z\\))的鞍点,如果对任意的 \\(w \\in W\\) 和 \\(z \\in Z\\) 下式成立:
也就是说,\\(f(x,\\hat z)\\) 在 \\(\\hat w\\) 处取得最小值(关于变量 \\(w\\in W\\)),\\(f(\\hat w, z)\\) 在 \\(\\hat z\\) 处取得最大值(关于变量 \\(z \\in Z\\)):
该式满足强极大极小性质,且共同值为 \\(f(\\hat w, \\hat z)\\),也就是上述说的,\\(\\hat w\\) 和 \\(\\hat z\\) 为 \\(f\\) 的鞍点。
五、最优性条件与 KKT 条件
5.1 KKT 条件
我们首先回顾一下拉格朗日函数,考虑下面的优化问题
\\(\\begin{aligned} \\text { minimize } \\quad& f_{0}(x)\\\\ \\text { s.t. } \\quad& f_{i}(x) \\leq 0, \\quad i=1, \\ldots, m\\\\ &h_{i}(x)=0, \\quad i=1, \\ldots, p \\end{aligned} \\\\\\)
那么他的拉格朗日函数就是
\\(L(x,\\lambda,\\nu)=f_0(x)+\\lambda^Tf(x)+\\nu^Th(x) \\\\\\)
首先,我们看对偶函数
\\(g(\\lambda,\\nu)=\\inf_{x\\in\\mathcal{D}}\\left(f_0(x)+\\lambda^Tf(x)+\\nu^Th(x)\\right) \\\\\\)
对偶问题实际上就是
\\(d^\\star = \\sup_{\\lambda,\\nu}g(\\lambda,\\nu)=\\sup_{\\lambda,\\nu}\\inf_x L(x,\\lambda,\\nu) \\\\\\)
然后我们再看原问题,由于 \\(\\lambda\\succeq0,f(x)\\preceq0\\),我们有
\\(f_0(x)=\\sup_{\\lambda,\\nu}L(x,\\lambda,\\nu) \\\\\\)
原问题的最优解实际上就是
\\(p^\\star=\\inf_x f_0(x)= \\inf_x \\sup_{\\lambda,\\nu}L(x,\\lambda,\\nu) \\\\\\)
弱对偶性 \\(p^\\star \\ge d^\\star\\) 实际上说的是什么呢?就是 max-min 不等式
\\(\\inf_x \\sup_{\\lambda,\\nu}L(x,\\lambda,\\nu) \\ge \\sup_{\\lambda,\\nu}\\inf_x L(x,\\lambda,\\nu) \\\\\\)
强对偶性说的又是什么呢?就是上面能够取等号
\\(\\inf_x \\sup_{\\lambda,\\nu}L(x,\\lambda,\\nu) = \\sup_{\\lambda,\\nu}\\inf_x L(x,\\lambda,\\nu) = L({x}^\\star,{\\lambda}^\\star,{\\nu}^\\star) \\\\\\)
注:实际上 \\({x}^\\star,{\\lambda}^\\star,{\\nu}^\\star\\) 就是拉格朗日函数的鞍点!!!(数学家们真实太聪明了!!!妙啊!!!)那么也就是说强对偶性成立等价于拉格朗日函数存在鞍点(在定义域内)。
好,如果存在鞍点(一阶导为 0)的话,我们怎么求解呢?还是看上面取等的式子
\\(\\begin{aligned} f_0({x}^\\star) = g(\\lambda^\\star,\\nu^\\star) &= \\inf_x \\left( f_0(x)+\\lambda^{\\star T}f(x)+\\nu^{\\star T}h(x) \\right) \\\\ & \\le f_0(x^\\star)+\\lambda^{\\star T}f(x^\\star)+\\nu^{\\star T}h(x^\\star) \\\\ & \\le f_0(x^\\star) \\end{aligned} \\\\\\)
这两个不等号必须要取到等号,而第一个不等号取等条件应为(鞍点一阶导为 0)
\\(\\nabla_x \\left( f_0(x)+\\lambda^{\\star T}f(x)+\\nu^{\\star T}h(x) \\right) =0 \\\\\\)
第二个不等号取等条件为(这个条件成立,等号才能取到)
\\(\\lambda^\\star_i f_i(x^\\star)=0,\\forall i \\\\\\)
同时,由于 \\({x}^\\star,{\\lambda}^\\star,{\\nu}^\\star\\) 还必须位于定义域内,需要满足约束条件,因此上面的几个条件共同构成了 KKT 条件。
KKT 条件
- 原始约束 \\(f_i(x)\\le0,i=1,...,m, \\quad h_i(x)=0,i=1,...,p\\)
- 对偶约束 \\(\\lambda\\succeq0\\)
- 互补性条件(complementary slackness) \\(\\lambda_i f_i(x)=0,i=1,...,m\\)
- 梯度条件
\\(\\nabla f_{0}(x)+\\sum_{i=1}^{m} \\lambda_{i} \\nabla f_{i}(x)+\\sum_{i=1}^{p} \\nu_{i} \\nabla h_{i}(x)=0 \\\\\\)
5.2 KKT 条件与凸问题
Remarks(重要结论)
- 前面推导没有任何凸函数的假设,因此不论是否为凸问题,如果满足强对偶性,那么最优解一定满足 KKT 条件。
- 但是反过来不一定成立,也即 KKT 条件的解不一定是最优解,因为如果 \\(L(x,\\lambda^\\star,\\nu^\\star)\\) 不是凸的,那么 \\(\\nabla_x L=0\\) 并不能保证 \\(g(\\lambda^\\star,\\nu^\\star)=\\inf_x L(x,\\lambda^\\star,\\nu^\\star)\\ne L(x^\\star,\\lambda^\\star,\\nu^\\star)\\),也即不能保证 \\({x}^\\star,{\\lambda}^\\star,{\\nu}^\\star\\) 就是鞍点。
但是如果我们假设原问题为凸问题的话,那么 \\(L(x,\\lambda^\\star,\\nu^\\star)\\) 就是一个凸函数,由梯度条件 \\(\\nabla_x L=0\\) 我们就能得到 \\(g(\\lambda^\\star,\\nu^\\star)=L(x^\\star,\\lambda^\\star,\\nu^\\star)=\\inf_x L(x,\\lambda^\\star,\\nu^\\star)\\),另一方面根据互补性条件我们有此时 \\(f_0(x^\\star)=L(x^\\star,\\lambda^\\star,\\nu^\\star)\\),因此我们可以得到一个结论
Remarks(重要结论):
- 考虑原问题为凸的,那么若 KKT 条件有解 \\(\\tilde{x},\\tilde{\\lambda},\\tilde{\\nu}\\),则原问题一定满足强对偶性,且他们就对应原问题和对偶问题的最优解。
- 但是需要注意的是,KKT 条件可能无解!此时就意味着原问题不满足强对偶性!
假如我们考虑上一节提到的 SCQ 条件,如果凸优化问题满足 SCQ 条件,则意味着强对偶性成立,则此时有结论
Remarks(重要结论):
如果 SCQ 满足,那么 \\(x\\) 为最优解当且仅当存在 \\(\\lambda,\\nu\\) 满足 KKT 条件!
[例子 1]:等式约束的二次优化问题 \\(P\\in S_+^n\\)
\\(\\begin{aligned} \\text { minimize } \\quad& (1/2)x^TPx+q^Tx+r \\\\ \\text { s.t. } \\quad& Ax=b \\end{aligned} \\\\\\)
那么经过简单计算就可以得到 KKT 条件为
\\(\\left[\\begin{array}{cc} P & A^{T} \\\\ A & 0 \\end{array}\\right]\\left[\\begin{array}{l} x^{\\star} \\\\ \\nu^{\\star} \\end{array}\\right]=\\left[\\begin{array}{c} -q \\\\ b \\end{array}\\right] \\\\\\)
六、扰动及灵敏度分析
6.1 扰动问题
注:扰动其实就是约束条件多了点限制
现在我们再回到原始问题
\\(\\begin{aligned} \\text { minimize } \\quad& f_{0}(x)\\\\ \\text { s.t. } \\quad& f_{i}(x) \\leq 0, \\quad i=1, \\ldots, m\\\\ &h_{i}(x)=0, \\quad i=1, \\ldots, p \\end{aligned} \\\\\\)
我们引入了对偶函数 \\(g(\\lambda,\\nu)\\),那这两个参数 \\(\\lambda,\\nu\\) 有什么含义吗?假如我们把原问题放松一下
\\(\\begin{aligned} \\text { minimize } \\quad& f_{0}(x)\\\\ \\text { s.t. } \\quad& f_{i}(x) \\leq u_i, \\quad i=1, \\ldots, m\\\\ &h_{i}(x)=v_i, \\quad i=1, \\ldots, p \\end{aligned} \\\\\\)
记最优解为 \\(p^\\star(u,v)=\\min f_0(x)\\),现在对偶问题变成了
\\(\\begin{aligned} \\max \\quad& g(\\lambda,\\nu)-u^T\\lambda -v^T\\nu\\\\ \\text{s.t.} \\quad& \\lambda\\succeq0 \\end{aligned} \\\\\\)
假如说原始对偶问题的最优解为 \\(\\lambda^\\star,\\nu^\\star\\),松弛后的对偶问题最优解为 \\(\\tilde{\\lambda},\\tilde{\\nu}\\),那么根据弱对偶性原理,有
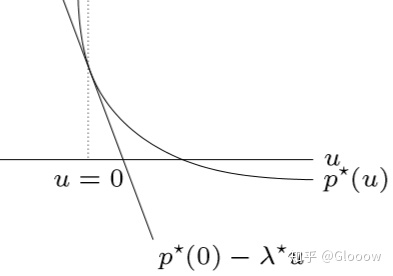
\\(\\begin{aligned} p^\\star(u,v) &\\ge g(\\tilde\\lambda,\\tilde\\nu)-u^T\\tilde\\lambda -v^T\\tilde\\nu \\\\ &\\ge g(\\lambda^\\star,\\nu^\\star)-u^{T}\\lambda^\\star -v^{T}\\nu^\\star \\\\ &= p^\\star(0,0) - u^{T}\\lambda^\\star -v^{T}\\nu^\\star \\end{aligned} \\\\\\)
这像不像关于 \\(u,v\\) 的一阶近似?太像了!实际上,我们有
\\(\\lambda_{i}^{\\star}=-\\frac{\\partial p^{\\star}(0,0)}{\\partial u_{i}}, \\quad \\nu_{i}^{\\star}=-\\frac{\\partial p^{\\star}(0,0)}{\\partial v_{i}} \\\\\\)
6.2 灵敏度分析
注:细节我也没认真看,其实看看下述给出的灵敏度解释,也就是大概知道扰动会对结果造成什么影响就行了
- 如果\\(\\lambda_i^*\\)比较大,加强第i个约束,即\\(u_i< 0\\),则最优值\\(P^*(u,l)\\)会大幅增加。
- 如果\\(\\lambda_i^*\\)比较小,放松第i个约束,即\\(u_i> 0\\),则最优值\\(P^*(u,l)\\)不会减小太多。
- 如果\\(v_i^*\\)比较大且大于0,\\(l_i< 0]\\),或者如果\\(v_i^*\\)比较大且小于0,\\(l_i> 0\\),则最优值\\(P^*(u,l)\\)会大幅增加。
- 如果\\(v_i^*\\)比较小且大于0,\\(l_i> 0\\),或者如果\\(v_i^*\\)比较大且小于0,\\(l_i< 0\\),则最优值\\(P^*(u,l)\\)不会减少太多。
七、Reformulation
前面将凸优化问题的时候,我们提到了Reformulation的几个方法来简化原始问题,比如消去等式约束,添加等式约束,添加松弛变量,epigraph等等。现在当我们学习了对偶问题,再来重新看一下这些方法。
7.1 引入等式约束
[例子 1】:考虑无约束优化问题 \\(\\min f(Ax+b)\\),他的对偶问题跟原问题是一样的。如果我们引入等式约束,原问题和对偶问题变为
\\(\\begin{aligned} \\text{minimize} \\quad& f_{0}(y) \\quad \\\\ \\text{s.t.} \\quad& A x+b-y=0 \\end{aligned} \\quad\\qquad \\begin{aligned} \\text{minimize} \\quad& b^{T} \\nu-f_{0}^{*}(\\nu) \\\\ \\text{s.t.} \\quad& A^{T} \\nu=0 \\end{aligned} \\\\\\)
[例子 2]:考虑无约束优化 \\(\\min \\Vert Ax-b\\Vert\\),类似的引入等式约束后,对偶问题变为
\\(\\begin{aligned} \\text{minimize} \\quad& b^{T} \\nu \\\\ \\text{s.t.} \\quad& A^{T} \\nu=0,\\quad \\Vert\\nu\\Vert_*\\le1 \\end{aligned} \\\\\\)
7.2 显示约束与隐式约束的相互转化
[例子 3]:考虑原问题如下,可以看出来对偶问题非常复杂
\\(\\begin{aligned} \\text{minimize} \\quad& c^{T} x \\\\ \\text{s.t.} \\quad& A x=b \\\\ \\quad& -1 \\preceq x \\preceq 1 \\end{aligned} \\begin{aligned} \\text{maximize} \\quad& -b^{T} \\nu-\\mathbf{1}^{T} \\lambda_{1}-\\mathbf{1}^{T} \\lambda_{2} \\\\ \\text{s.t.} \\quad& c+A^{T} \\nu+\\lambda_{1}-\\lambda_{2}=0 \\\\ \\quad& \\lambda_{1} \\succeq 0, \\quad \\lambda_{2} \\succeq 0 \\end{aligned} \\\\\\)
如果我们原问题的不等式约束条件转化为隐式约束,则有
\\(\\begin{aligned} \\text{minimize} \\quad& f_{0}(x)=\\left\\{\\begin{array}{ll}c^{T} x & \\Vert x\\Vert_\\infty \\preceq 1 \\\\ \\infty & \\text { otherwise }\\end{array}\\right. \\\\ \\text{s.t.} \\quad& A x=b \\end{aligned} \\\\\\)
然后对偶问题就可以转化为无约束优化问题
\\(\\text{maximize} -b^T\\nu-\\Vert A^T\\nu +c\\Vert_1 \\\\\\)
7.3 转化目标函数与约束函数
[例子 4]:还考虑上面提到的无约束优化问题 \\(\\min \\Vert Ax-b\\Vert\\),我们可以把目标函数平方一下,得到
\\(\\begin{aligned} \\text{minimize} \\quad& (1/2)\\Vert y\\Vert^2 \\\\ \\text{s.t.} \\quad& Ax-b=y \\end{aligned} \\\\\\)
然后对偶问题就可以转化为
\\(\\begin{aligned} \\text{minimize} \\quad& (1/2)\\Vert \\nu\\Vert_*^2+ b^T\\nu \\\\ \\text{s.t.} \\quad& A^T\\nu=0 \\end{aligned} \\\\\\)
参考文献:Stephen Boyd, Lieven Vandenberghe: Convex Optimization
以上是关于04-拉格朗日对偶问题和KKT条件的主要内容,如果未能解决你的问题,请参考以下文章