使用Python实现Primal-Dual Interior Point Method
Posted Babyface Killer
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了使用Python实现Primal-Dual Interior Point Method相关的知识,希望对你有一定的参考价值。
Primal Dual Problem
对于每一个优化问题(Primal problem),都有其对应的对偶问题(Dual problem)。每个优化问题的对偶问题可设置一个优化问题的Lagrangian function并求其最优解得出。例如:
对优化问题 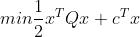 约束条件为
约束条件为 ,
, ,Lagrangian funciton可表示为:
,Lagrangian funciton可表示为: ,对其求最优解可得:
,对其求最优解可得: ,将
,将 带入Lagrangian function,则得到对偶问题为:
带入Lagrangian function,则得到对偶问题为: 约束条件为
约束条件为
在每次迭代求解时,对偶问题都为初始问题提供了一个下限(lower bound),在迭代的过程中初始问题和对偶问题会向着各自的最优解方向移动,当初始问题达到最优解时其对偶问题也达到最优解,此时初始问题和其对偶问题最优解对应的目标函数值相同。
Interior Point Method
Interior Point method 为上述求初始问题和对偶问题的最优解提供了一个可迭代的算法,在每次的迭代过程中初始问题目标函数的值与对偶问题目标函数的值之差会越来越小,当该算法收敛时初始问题的目标函数的值和对偶函数的目标函数的值相等。
Barrier Reformulation
为了更简便地使用迭代算法并保证每次迭代后的点都在可行区间内,可以使用 来替代约束条件,因此一个线性优化问题就可转化为:
来替代约束条件,因此一个线性优化问题就可转化为:
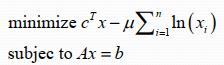 ,其Lagrangian function可表示为:
,其Lagrangian function可表示为: 。
。
为求得其最优解: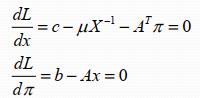 ,设z为
,设z为 ,则可构成一个等式系统:
,则可构成一个等式系统:
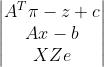 =
= 。使用Newton‘s method来依次迭代求得该系统的解:
。使用Newton‘s method来依次迭代求得该系统的解:

 =
= ,
,  =
= +
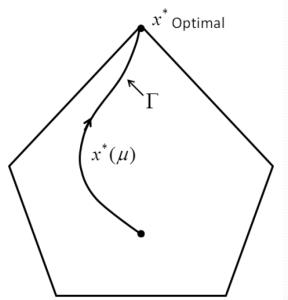
+ 。 该等式系统定义了一条中心路径,沿着这条路径即可找到最优解:
。 该等式系统定义了一条中心路径,沿着这条路径即可找到最优解: ,如下图所示:
,如下图所示:
为了保证每次迭代得到的x都在中心路径附近,定义一个参数
 ,该参数决定了每次迭代得到的x是否靠近中心路径。同时使用
,该参数决定了每次迭代得到的x是否靠近中心路径。同时使用 来测量每次迭代到达最优解的进度,于是上述等式系统就可转化为:=
来测量每次迭代到达最优解的进度,于是上述等式系统就可转化为:=
使用Python实现Primal-Dual Interior Point Method
因为舍入误差,算法可能无法收敛到最优解,因此设置停止条件为: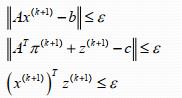
该算法中加入了Predictor-Corrector步骤,其中Predictor步骤不考虑中心路径计算出下降方向,Corrector步骤使用泰勒二阶近似使下降方向靠近中心路径。
该函数只适用于目标函数为二次函数求最优解的情况,其他情况与上述推导过程类似。
def primal_dual_interior_point(c,Q,A,b,x,pi,z,eta):
"""
Description:
this function uses primal-dual interior method to
solve convex quadratic constrained optimization
Input:
c: coefficient of linear part
Q: coefficient of quadratic part
A: coefficient of linear constraint
b: value of linear constraint
x, pi, z: column vectors of initial infeasible solution
eta: damping parameter
Output:
Optimal solution of x,pi,z
"""
# import library
import numpy as np
# set tolerance
tol=1E-8
# number of variables
var_num=len(x)
# calcualte stopping criteria
c_1=np.linalg.norm(np.dot(A,x)-b)
c_2=np.linalg.norm(-np.dot(Q,x)+np.dot(A.T,pi)+z-c)
c_3=np.dot(x.T,z)
# initialize counter
counter=0
# print the information of initial infeasible solution
print("=====Iteration=====".format(counter))
print('x: '.format(x))
print('pi: '.format(pi))
print('z: '.format(z))
print('tau: '.format('-'))
print('primal problem: '.format(np.dot(c.T,x)+0.5*np.dot(x.T,Q).dot(x)))
print('dual problem: '.format(-np.dot(b.T,pi)-0.5*np.dot(x.T,Q).dot(x)))
print('Residual of primal: '.format(c_1))
print('Residual of dual: '.format(c_2))
print('x.T dot x: '.format(c_3))
# check stopping criteria
while (c_1 > tol) | (c_2>tol) | (c_3>tol):
# calculate residules for the infeasible solution
r_p=np.dot(A,x)-b
r_d=-np.dot(Q,x)+np.dot(A.T,pi)+z-c
XZe=np.dot(np.diag(x),np.diag(z).dot(np.ones((var_num))))
# stack the coefficient matrix
coef_1=np.vstack((-Q,A,np.diag(z)))
coef_2=np.vstack((A.T,np.zeros((coef_1.shape[0]-var_num,A.shape[0]))))
coef_3=np.vstack((np.identity(var_num),np.zeros((A.shape[0],var_num)),np.diag(x)))
coef=np.hstack((coef_1,coef_2,coef_3))
# stack the residuals
r=np.vstack((-r_d.reshape(-1,1),-r_p.reshape(-1,1),-XZe.reshape(-1,1)))
# solve for affine scaling directions
d_aff=np.linalg.solve(coef,r)
# get direction for each part
d_x_aff=d_aff[:var_num]
d_pi_aff=d_aff[var_num:coef.shape[0]-var_num]
d_z_aff=d_aff[-var_num:]
# find step length of the affine scaling direction
# create a list to store possible selections
selections=[1]
# iterate through possible selections and append result to the list
for i in range(var_num):
if d_x_aff[i] < 0:
selections.append((-x[i]/d_x_aff[i])[0])
if d_z_aff[i] < 0:
selections.append((-z[i]/d_z_aff[i])[0])
# find the minimum value in possible selections
selections=np.array(selections)
alpha_aff=np.min(selections)
# calculate the duality measure
y=np.dot(x.T,z)/var_num
y_aff=np.dot((x+alpha_aff*d_x_aff.reshape(-1)).T,(z+alpha_aff*d_z_aff.reshape(-1)))/var_num
# calculate the centering parameter
tau=(y_aff/y)**3
# stack the adjusted residuals
r_l=-XZe.reshape(-1,1)+np.diag(d_x_aff.reshape(-1)).dot(np.diag(d_z_aff.reshape(-1))).dot(np.ones((var_num,1)))+tau*y*np.ones((var_num,1))
r_adjust=np.vstack((-r_d.reshape(-1,1),-r_p.reshape(-1,1),r_l))
# solve for search direction
d=np.linalg.solve(coef,r_adjust)
# get direction for each part
d_x=d[:var_num]
d_pi=d[var_num:coef.shape[0]-var_num]
d_z=d[-var_num:]
# create a list to store possible selections
selections=[1]
# iterate through possible selections and append result to the list
for i in range(var_num):
if d_x[i] < 0:
selections.append((-eta*x[i]/d_x[i])[0])
if d_z[i] < 0:
selections.append((-eta*z[i]/d_z[i])[0])
# find the minimum value in possible selections
selections=np.array(selections)
alpha=np.min(selections)
# calcualte new iterates
x=x+alpha*d_x.reshape(-1)
pi=pi+alpha*d_pi.reshape(-1)
z=z+alpha*d_z.reshape(-1)
# calcualte stopping criteria
c_1=np.linalg.norm(np.dot(A,x)-b)
c_2=np.linalg.norm(-np.dot(Q,x)+np.dot(A.T,pi)+z-c)
c_3=np.dot(x.T,z)
# print the information of each iteration
print("=====Iteration=====".format(counter+1))
print('x: '.format(x))
print('pi: '.format(pi))
print('z: '.format(z))
print('tau: '.format(tau))
print('primal problem: '.format(np.dot(c.T,x)+0.5*np.dot(x.T,Q).dot(x)))
print('dual problem: '.format(-np.dot(b.T,pi)-0.5*np.dot(x.T,Q).dot(x)))
print('Residual of primal: '.format(c_1))
print('Residual of dual: '.format(c_2))
print('x.T dot x: '.format(c_3))
# update counter
counter+=1
return x,pi,z
以上是关于使用Python实现Primal-Dual Interior Point Method的主要内容,如果未能解决你的问题,请参考以下文章