卡尔曼滤波
Posted 柿子鸡蛋饭
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了卡尔曼滤波相关的知识,希望对你有一定的参考价值。
学习背景
室内定位项目中,基于tdoa的定位方式,需要精准的时钟同步,有关材料显示卡尔曼滤波时钟同步在准确度和稳定性上都比较突出。
我将通过分析公式的方式,记录学习过程。
卡尔曼滤波公式
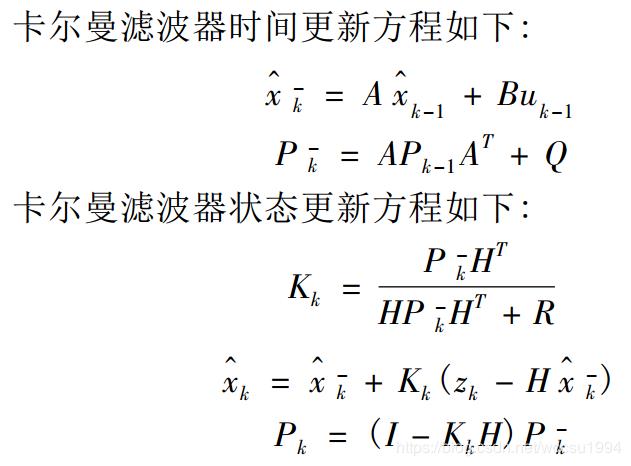
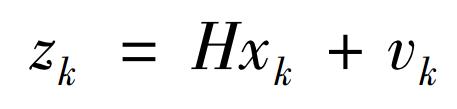
此外还要给出控制理论中的状态方程和观测方程

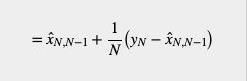
加权平均
对于卡尔曼滤波最直观、最容易接受的理解就是加权平均,但是带着平均的思想再看公式发现还是很难理解,这里给出一个参照公式 - 平均的增量公式。
是否发现它与状态更新的第二个方程很像,其实他们不但长得像,在性质上都逐步减小了观测值对预估的影响。
这样我们找到了卡尔曼滤波5公式其中一个的原型。
对于一个静态系统这可能是一个可靠的估计,如果是一个时变的动态系统,这显然就不够用了。
动态系统
这里需要举个例子来说,因为对于不同的应用问题,这里是不一样的。
例如我的学习背景 - 时钟同步问题:
假定时钟随时间线性变化,设时钟变化速率v,时钟值为c,取离散值的节点用k表示,周期用T表示。
c(k) = c(k - 1) + T * v(k - 1)
v(k) = v(k - 1)
这两个式子的矩阵形式就是时间更新方程里的第一个,去掉Bu(k - 1)项。(这一项是考虑外部噪声,比如时钟变化速率在加速变化)
卡尔曼增益K
我们回过头来看一下增量平均公式中的
它对应的是卡尔曼滤波公式中的卡尔曼增益K,也是卡尔曼滤波算法的主要贡献之一。
对于一个需要长时间运行的系统N是无穷大的,这不利于系统的实现。
在追踪类问题中,目标会产生无法预计的变化,这种过分忽视观测值得做法会对估计性能产生不利影响。
卡尔曼先生用测量不确定度协方差R与估计不确定度协方差P来制作卡尔曼增益。
R通过观测设备厂家获得或通过大量测试统计。
P通过系统迭代收敛到0,初始选择会影响收敛速度。
接下来,我们将从另一个视角继续分析卡尔曼滤波的其他部分。
贝叶斯
卡尔曼滤波也是贝叶斯派系的一员,其状态更新方程符合隐式马尔科夫模型,可以看做是高斯分布的贝叶斯估计,比传统的贝叶斯估计更易计算概率。
而高斯分布的贝叶斯可以推导出最小二乘,于是我们得到另一个视角。
最小二乘
卡尔曼滤波可以看做是递归最小二乘。
小结
到此我们说卡尔曼滤波兼具贝叶斯与最小二乘的性质。
以上是关于卡尔曼滤波的主要内容,如果未能解决你的问题,请参考以下文章
卡尔曼滤波 KF | 扩展卡尔曼滤波 EKF (思路流程和计算公式)