图
Posted 亿杯奶茶
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了图相关的知识,希望对你有一定的参考价值。
图的思维导图
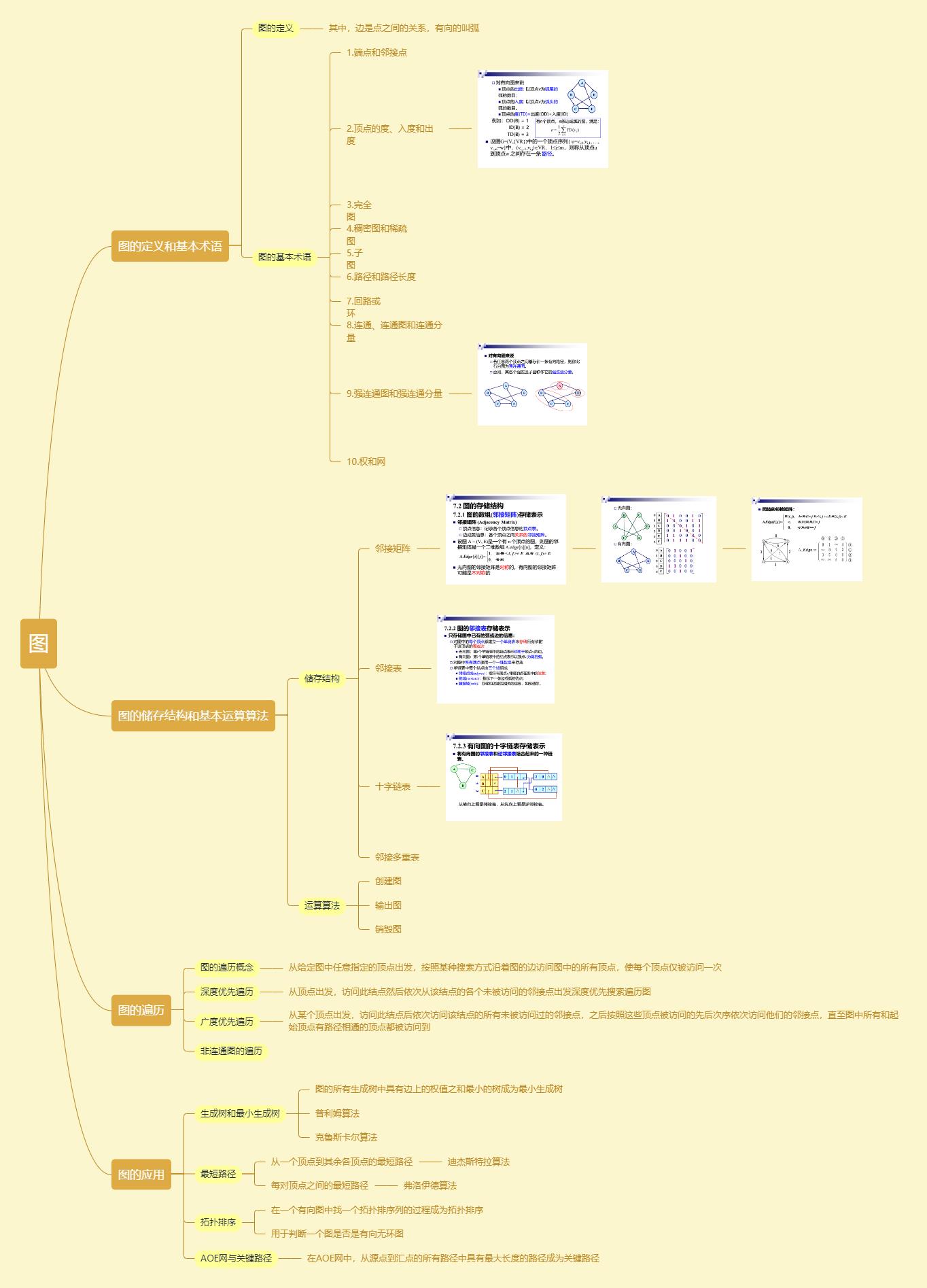
图的重要概念丰富
图的储存结构和基本运算算法
(一)邻接矩阵储存法
- 图的完整邻接矩阵类型声明:
#define MAXV<最大顶点个数>
#define INF 32767 //定义∞
typedef struct
{ int no; //顶点的编号
Info Type info; //顶点的其他信息
}Vertex Type; //顶点的类型
typedef struct
{ int edges[MAXV][MAXV]; //邻接矩阵数组
int n e; //顶点数,边数
VertexType vexs[MAXV]; //存放顶点信息
}MatGraph; //完整的图邻接矩阵类型
(二)邻接表储存法
- 图的完整邻接表储存类型声明如下:
typedef struct ANode
{ int adjvex; //该边的邻接点编号
struct ANode *nextarc; //指向下一条边的指针
int weight; //该边的相关信息
}ArcNode; //边结点的类型
typedef struct Vnode
{ Info Type info;
ArcNode *firstarc;
}VNode;
typedef struct
{ VNode adjlist[MAXV]; //邻接表的头结点数组
int n,e; //图中的顶点数n和边数e
}AdjGraph; //完整的图邻接表类型
(三)图的运算算法
- 图的运算包括创建图、输出图及销毁图
创建图根据邻接矩阵数组A、顶点个数n和边数e来建立图的邻接表G。输出图通过扫描邻接表G的头结点再对于每个单链表输出头结点的顶点信息,然后逐一输出单链表中的所有结点的顶点编号。销毁图对于邻接表G,扫描其头结点数组指向的所有单链表,逐个释放单链表中的边结点,最后释放头结点数组。
图的遍历
- 深度优先遍历算法如下:
int visited[MAX]={0}; //全局数组
void DFS(AdjGraph *G,int v) //深度优先遍历算法
{
ArcNode *p;
visited[v]=1; //置已访问标记
printf("%d",v); //输出被访问顶点的编号
p=G->adjlist[v].firstarc; //p指向顶点v的第一个邻接点
while(p!=NULL)
{
if(visited[p->adjvex]==0) //若p->adjvex顶点未被访问,递归访问它
DFS(G,p->adjvex);
p=p->nextarc; //p指向顶点v的下一个邻接点
}
}
- 广度优先遍历
广度优先遍历以邻接表为储存结构,在用广度优先遍历图时需要使用一个队列,可采用环形队列,以类似于二叉树的层次遍历方式来遍历图。在此暂不列出算法。 - DFS与BFS算法效率比较:
1、二者空间复杂度相同,都为O(n)(都使用了堆栈或队列)
2、时间复杂度只与储存结构(邻接矩阵和邻接表)有关,而与搜索路径无关。
3、搜索路径由储存结构与算法共同决定
图的应用
-
生成树与最小生成树
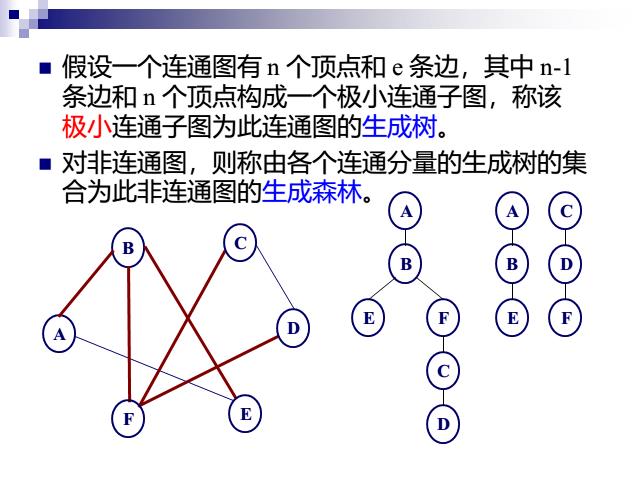
其中:图的所有生成树中具有边上的权值之和最小的树成为最小生成树 -
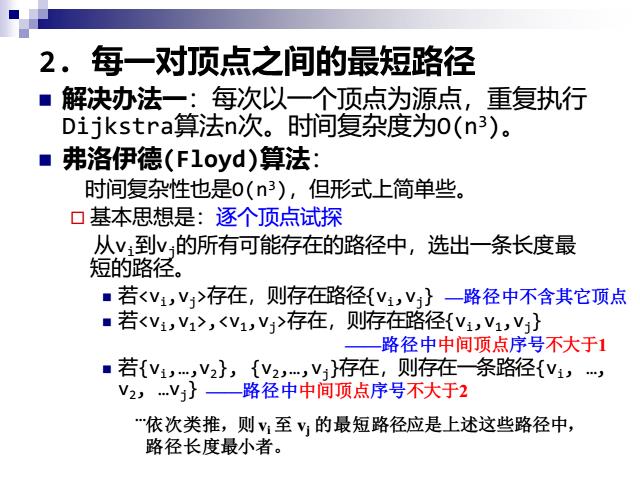
最短路径
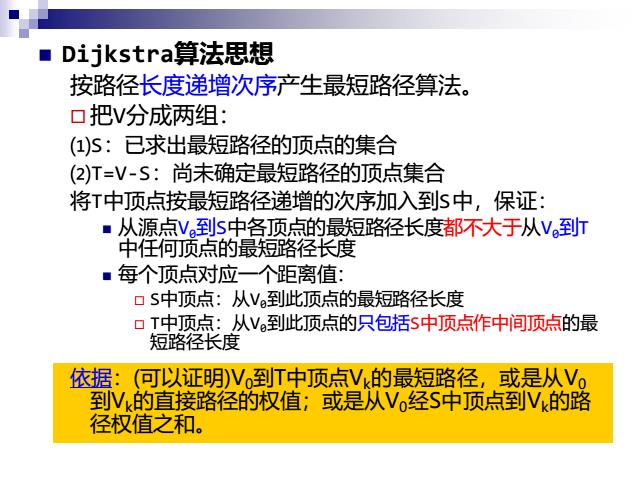
Dijkstra算法:
-
拓扑排序
(1)从一个有向图中选择一个没有前驱的顶点并输出它。
(2)从图中删去该顶点,并删去从该顶点发出的全部有向边。
(3)重复(1)(2)两步、直到剩余的图中不再存在没有前驱的顶点为止。 -
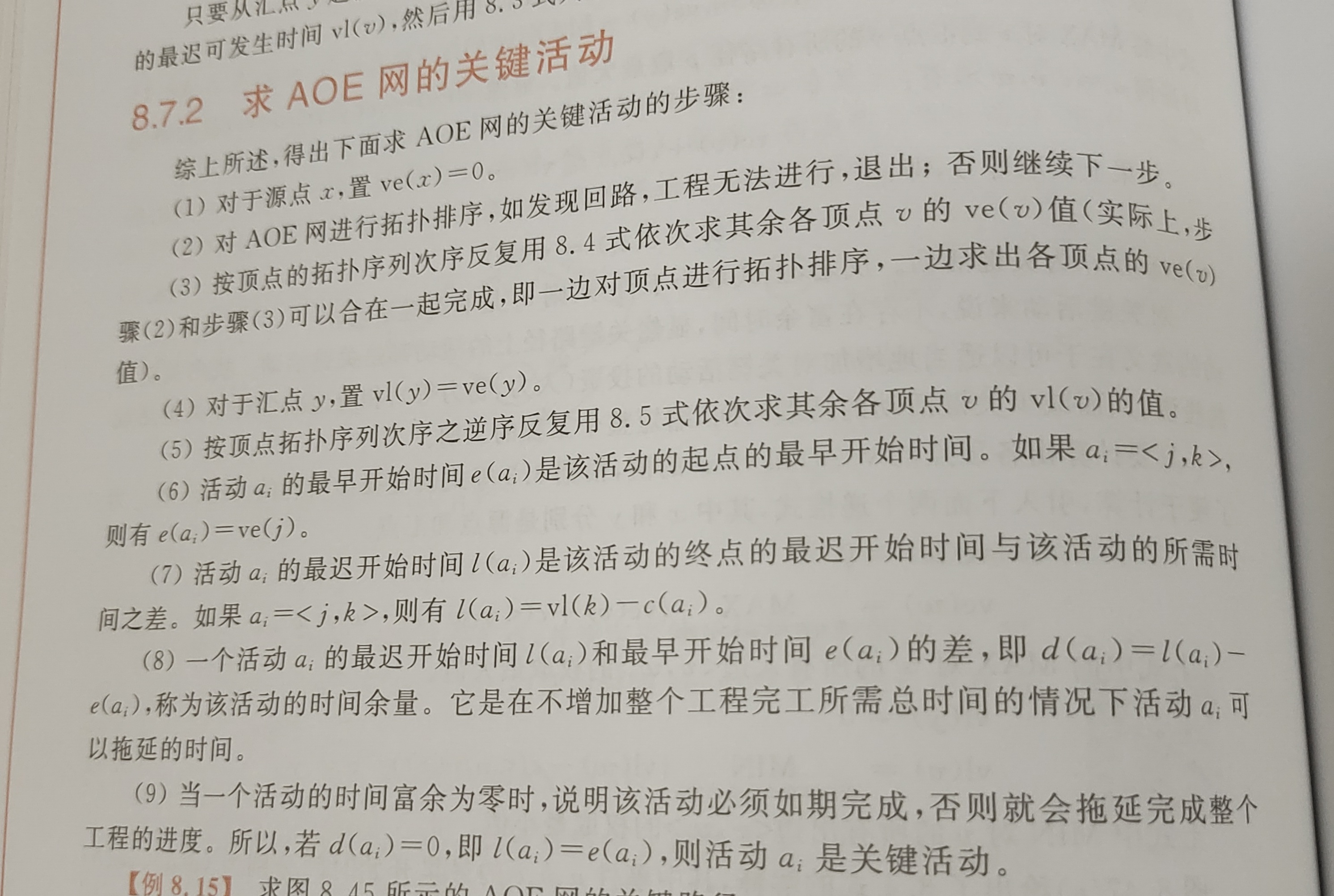
AOE网与关键路径
在AOE网中,从源点到汇点的所有路径中具有最大长度的路径成为关键路径。
尚存问题:
对于图应用方面掌握不足
以上是关于图的主要内容,如果未能解决你的问题,请参考以下文章