数据结构
Posted 錵開や落幕
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了数据结构相关的知识,希望对你有一定的参考价值。
数据结构
数组和链表
数组
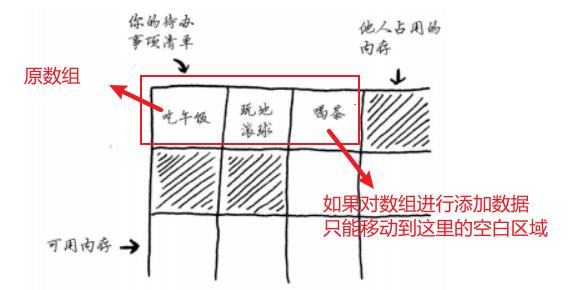
数组是内存地址中连在一起的几个内存单元组成 必须是连续的地址
这样的话 如果用户在数组中添加数据 而数组内存区域中没有相连的内存地址 就只能复制数组再进行添加 将数组移动到一个连续的地址区域中 这样效率会非常慢
链表
链表中的元素可存储在内存的任何地方。
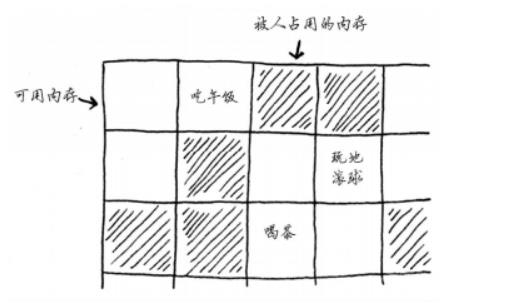
链表的每个元素都存储了下一个元素的地址,从而使一系列随机的内存地址串在一起。
在需要读取链表的最后一个元素时,你不能直接读取,因为你不知道它所处的地址,必须先访问元素#1,从中获取元素#2的地址,再访问元素#2并从中获取元素#3的地址,以此类推,直到访问最后一个元素。需要同时读取所有元素时,链表的效率很高:你读取第一个元素,根据其中的地址再读取第二个元素,以此类推。但如果你需要跳跃,链表的效率真的很低。
数组与此不同:你知道其中每个元素的地址。例如,假设有一个数组,它包含五个元素,起始地址为00,那么连续的5个元素地址为
00、01、02、03、04、05
数组的索引从0开始
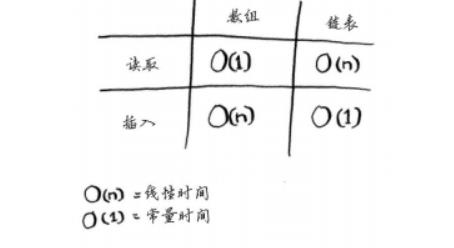
下面列出了常见的数组和链表操作的运行时间。
在中间插入
假设要在你原先的数组或者是链表中间插入一个值
- 链表 可以直接修改前一个元素的下个内存地址指向 这样很容易实现插入操作
- 数组 则必须将后面的元素后移
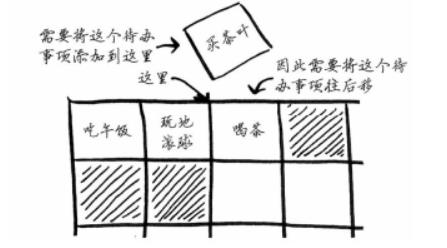
如果没有足够的空间,可能还得将整个数组复制到其他地方!因此,当需要在中间插入元素
时,链表是更好的选择。
删除
如果你要删除元素,链表也是最好的选择,因为只需要修改前一个元素的地址指向就可以完成修改。而使用数组时,删除元素后,必须将后面的元素都往前移动。
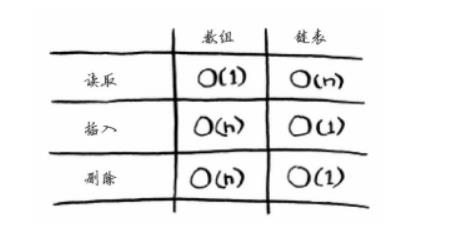
需要指出的是,仅当能够立即访问要删除的元素时,删除操作的运行时间才为O(1).通常我们都记录了链表的第一个元素和最后一个元素,因此删除这些元素时运行时间为O(1).
栈
栈是一种数据呈线性排列的数据结构,不过在这种数据结构中,我们只能访问最新添加的数据。栈就像是一摞书,拿到新书 时我们会把他放在书顶,取书也只能从上面去取。
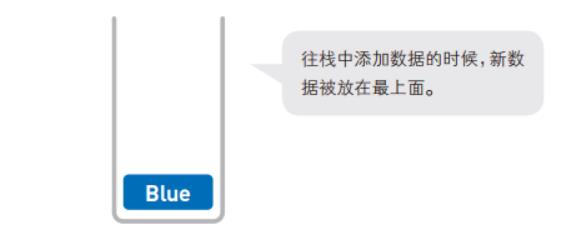
往栈中添加数据叫做入栈(push),往栈中取出数据叫做出栈(pop)
像栈这种最后添加的数据最先被取出,即“后进先出”的结构,我们称为 Last In First Out,简称 LIFO。与链表和数组一样,栈的数据也是线性排列,但在栈中,添加和删除数据的操作只能在一端进行,访问数据也只能访问到顶端的数据。想要访问中间的数据时,就必须通过出栈操作将目标数据移到栈顶才行。 所以栈在访问最新的数据时非常方便
队列queue
与前面提到的数据结构相同,队列中的数据也呈线性排列。虽然与栈有些相似,但队列中添加和删除数据的操作分别是在两端进行的。就和“队列”这个名字一样,把它想象成排成一队的人更容易理解。在队列中,处理总是从第一名开始往后进行,而新来的人只能排在队尾。
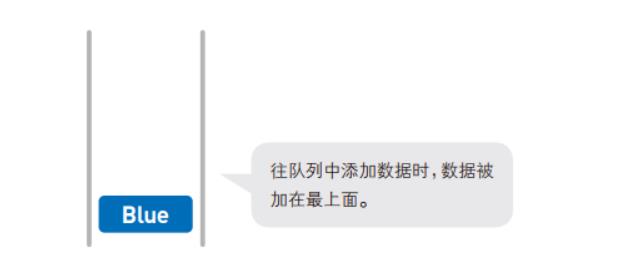
像队列这种最先进去的数据最先被取来,即“先进先出”的结构,我们称为 First In First Out,简称 FIFO。
与栈类似,队列中可以操作数据的位置也有一定的限制。在栈中,数据的添加和删除都在同一端进行,而在队列中则分别是在两端进行的。队列也不能直接访问位于中间的数据,必须通过出队操作将目标数据变成首位后才能访问。
哈希表(散列表)
概念
相比上述几种数据结构,在哈希表中进行添加,删除,查找等操作,性能十分之高,不考虑哈希冲突的情况下,仅需一次定位即可完成,时间复杂度为O(1),接下来我们就来看看哈希表是如何实现达到惊艳的常数阶O(1)的。
我们知道,数据结构的物理存储结构只有两种:顺序存储结构和链式存储结构(像栈,队列,树,图等是从逻辑结构去抽象的,映射到内存中,也这两种物理组织形式),而在上面我们提到过,在数组中根据下标查找某个元素,一次定位就可以达到,哈希表利用了这种特性,哈希表的主干就是数组。
哈希表存储的是键(key)和值(value)组成的数据
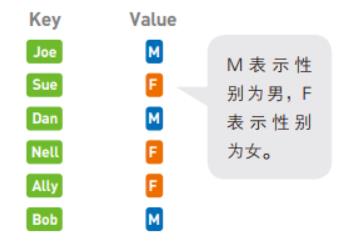
为了和哈希表对比我们先使用数组来存储数据 来进行比较
此处准备了 6 个箱子(即长度为 6 的数组)来存储数据。假设我们需要查询Ally的性别,由于不知道Ally的数据存储在哪个箱子里,所以只能从头开始查询。这个操作便叫作“线性查找”

这样只能挨个查找 数据量越多线性查找的时间就越长 由此可知 此处不适合用数组进行存储数据。
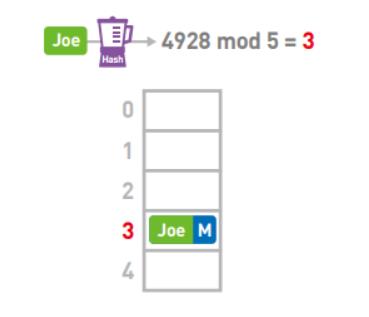
但使用哈希表便可以解决这个问题。首先准备好数组,这次我们用5个箱子的数组来存储数据。
- 使用哈希函数(Hash)计算 Joe的键,也就是字符串“Joe”的哈希值。得到的结果为4928
- 将得到的哈希值除以数组的长度5,求得其余数。这样的求余运算叫作“mod 运算”。此处mod运算的结果为3。因此,我们将Joe的数据存进数组的3号箱子中。重复前面的操作,将其他数据也存进数组中。
哈希冲突
如果两个mod运算后的值相同 原来数组该索引上已经有值时 就会产生哈希冲突,哈希冲突的解决方案有多种:开放定址法(发生冲突,继续寻找下一块未被占用的存储地址),再散列函数法,链地址法,而HashMap即是采用了链地址法,也就是数组+链表的方式,
链地址法
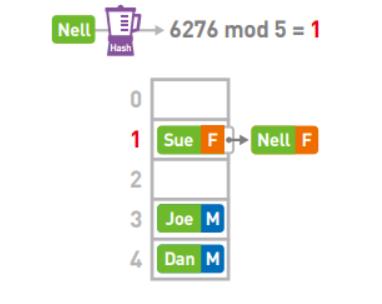
将冲突的数据用链表的方式连接(已有数据的后面继续存储新的数据。)
哈希表的查询方法
假如要查询Dan
- 为了知道Dan存储在哪个箱子里,首先需要算出Dan键的哈希值,然后对其进行mod运算。最后得到的结果为4,于是我们知道了它存储在4号箱中。
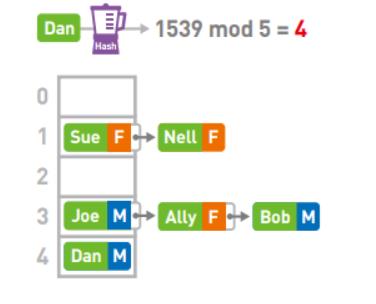
查看 4 号箱可知,其中的数据的键与 Dan 一致,于是取出对应的值。由此我们便知道了Dan的性别为男(M)。
- 如果想要查询Ally的值该怎么办呢?
为了找到它的存储位置,先要算出Ally键的哈希值,再对其进行mod运算。最终得到的结果为3。
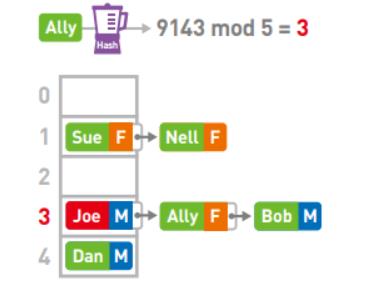
然而3号箱中数据的键是Joe而不是Ally。此时便需要对Joe所在的链表进行线性查找。
于是我们找到了键为Ally的数据。取出其对应的值,便知道了 Ally 的性别为女(F)。
- 在哈希表中,我们可以利用哈希函数快速访问到数组中的目标数据。如果发生哈希冲突,就使用链表进行存储。这样一来,不管数据量为多少,我们都能够灵活应对。如果数组的空间太小,使用哈希表的时候就容易发生冲突,线性查找的使用频率也会更高;反过来,如果数组的空间太大,就会出现很多空箱子,造成内存的浪费。因此,给数组设定合适的空间非常重要。
填装因子
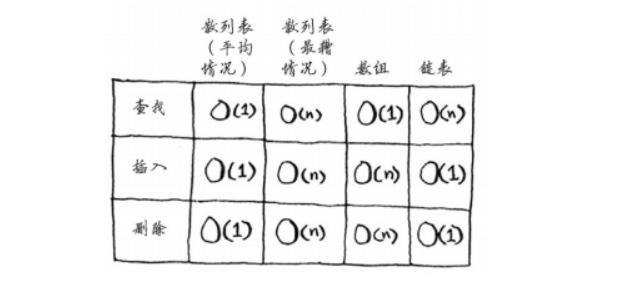
在平均情况下,散列表的查找(获取给定索引处的值)速度与数组一样快,而插入和删除速
度与链表一样快,因此它兼具两者的优点!但在最糟情况下,散列表的各种操作的速度都很慢。
因此,在使用散列表时,避开最糟情况至关重要。为此,需要避免冲突。而要避免冲突,需要有:
较低的填装因子;
良好的散列函数。
散列表的填装因子很容易计算。
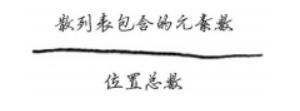
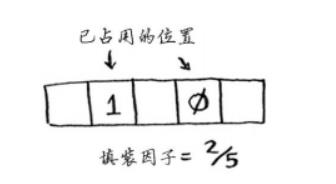
散列表使用数组来存储数据,因此你需要计算数组中被占用的位置数。例如,下述散列表的填装因子为2/5,即0.4。
假设你要在散列表中存储100种商品的价格,而该散列表包含100个位置。那么在最佳情况下,每个商品都将有自己的位置。这个散列表的填装因子为1。如果这个散列表只有50个位置呢?填充因子将为2。不可能让每种商品都有自己的位置,因为没有足够的位置!填装因子大于1意味着商品数量超过了数组的位置数。一旦填装因子开始增大,你就需要在散列表中添加位置,这被称为调整长度(resizing)。
当数组容量达到3/4时,就应该调整散列表的长度。
散列表是一种功能强大的数据结构,其操作速度快,还能让你以不同的方式建立数据模型。
你可能很快会发现自己经常在使用它。
你可以结合散列函数和数组来创建散列表。
冲突很糟糕,你应使用可以最大限度减少冲突的散列函数。
散列表的查找、插入和删除速度都非常快。
散列表适合用于模拟映射关系。
一旦填装因子超过0.7,就该调整散列表的长度。
散列表可用于缓存数据(例如,在Web服务器上)。
散列表非常适合用于防止重复。
堆
堆是一种图的树形结构,被用于实现“优先队列”(priority queues)。优先队列是一种数据结构,可以自由添加数据,但取出数据时要从最小值开始按顺序取出。在堆的树形结构中,各个顶点被称为“结点”(node),数据就存储在这些结点中。
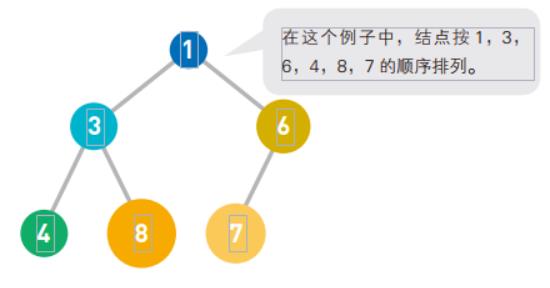
这就是堆的示例。结点内的数 字就是存储的数据。堆中的每 个结点最多有两个子结点。树 的形状取决于数据的个数。另 外,结点的排列顺序为从上到 下,同一行里则为从左到右。
在堆中存储数据时必须遵守这 样一条规则 :子结点必定大于父 结点。因此,最小值被存储在顶 端的根结点中。往堆中添加数据 时,为了遵守这条规则,一般会 把新数据放在最下面一行靠左 的位置。当最下面一行里没有多 余空间时,就再往下另起一行, 把数据加在这一行的最左端。
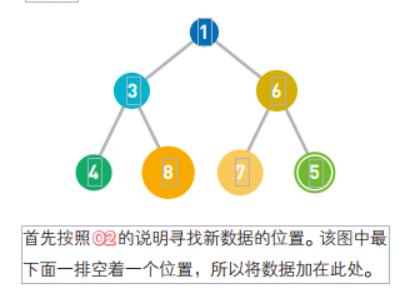
添加数据
- 我们试试往堆里添加数据 5
删除数据
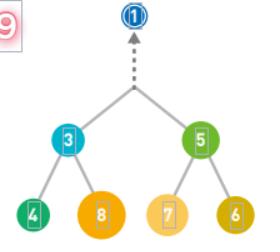
- 从堆中取出数据 1
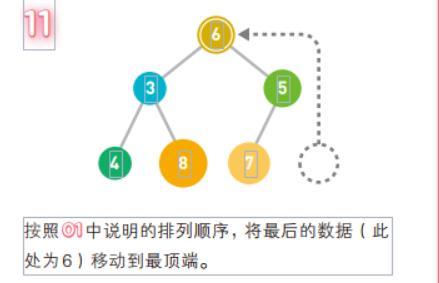
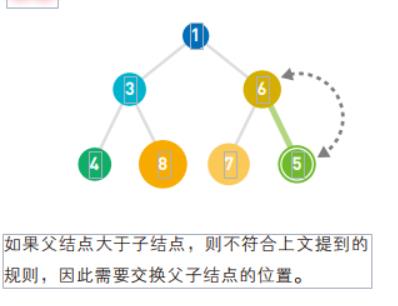
如果子节点的数小于父节点的 要进行替换

这里由于父结点的6大于子结点(右)的5大于子结点(左)的3,所以将左边的子结点与父结点进行交换。重复这个操作直到数据都符合规则,不再需要交换为止。
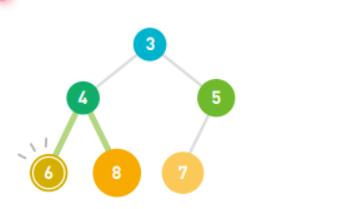
现在,子结点(右)的 8 大于父结点的 6 大于子结点(左)的 4,需要将左边的子结点与父结点进行交换。
堆中最顶端的数据始终最小,所以无论数据量有多少,取出最小值的时间复杂度都为 O(1)。
另外,因为取出数据后需要将最后的数据移到最顶端,然后一边比较它与子结点数据的大小,一边往下移动,所以取出数据需要的运行时间和树的高度成正比。假设数据量为n,根据堆的形状特点可知树的高度为 log2n ,那么重构树的时间复杂度便为 O(logn)。
添加数据也一样。在堆的最后添加数据后,数据会一边比较它与父结点数据的大小,一边往上移动,直到满足堆的条件为止,所以添加数据需要的运行时间与树的高度成正比,也是 O(logn)。
如果需要频繁地从管理的数据中取出最小值,那么使用堆来操作会非常方便
二叉查找树
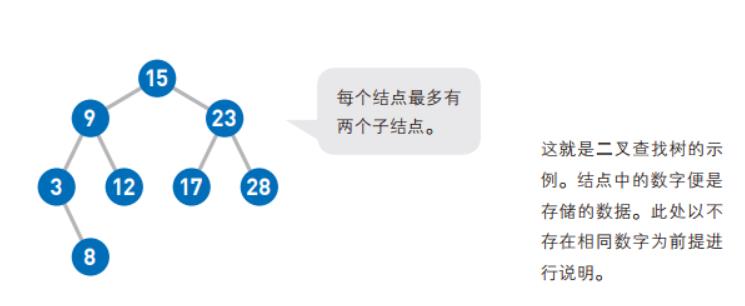
二叉查找树(又叫作二叉搜索树或二叉排序树)是一种数据结构,采用了图的树形结构,数据存储于二叉树的各个节点中
二叉树的特点
-
第一个是每个结点的值均大于其左子树上任意一个结点的值。比如结点9大于其左子树上的3和8。
-
第二个是每个结点的值均小于其右子树上任意一个结点的值。比如结点 15 小于其右子树上的23、17和28。
根据这两个性质可以得到以下结论。首先,二叉查找树的最小结点要从顶端开始,往其左下的末端寻找。此处最小值为3。
反过来,二叉查找树的最大结点要从顶端开始,往其右下的末端寻找。此处最大值为28。
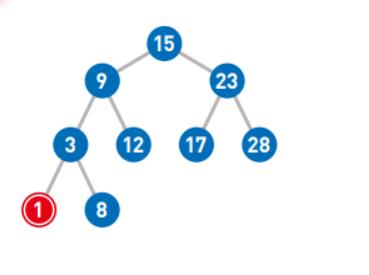
插入较小的数据 1

首先,从二叉查找树的顶端结点开始寻找添加数字的位置。将想要添加的1与该结点中的值进行比较,小于它则往左移,大于它则往右移。
- 最终位置如下:
添加较大值时的方案一样
删除节点
如果要删除的节点只有一个子节点 那么删除后直接将子节点的位置添加上去即可
- 试试删除节点 9
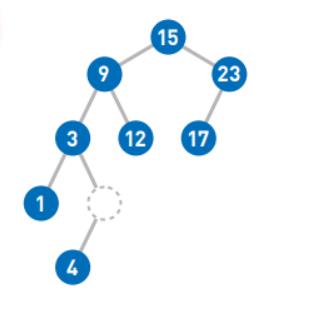
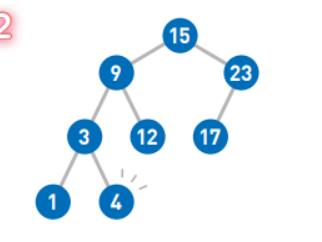
如果需要删除的结点有两个子结点,那么先删掉目标结点然后在被删除结点的左子树中寻找最大结点
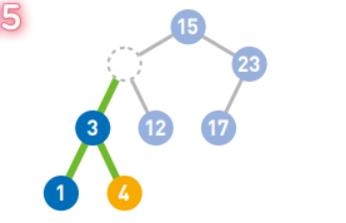
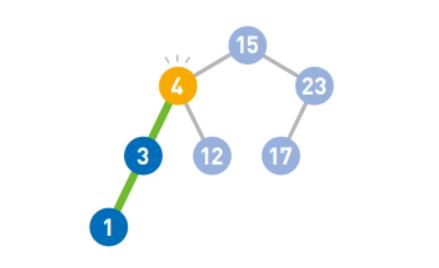
提示: 删除9的时候,我们将“左子树中的最大结点”移动到了删除结点的位置上,但是根据二叉查找树的性质可知,移动“右子树中的最小结点”也没有问题。
我们可以把二叉查找树当作是二分查找算法思想的树形结构体现。因为它具有前面提到的那两个性质,所以在查找数据或寻找适合添加数据的位置时,只要将其和现有的数据比较大小,就可以根据比较结果得知该往哪边移动了。
比较的次数取决于树的高度。所以如果结点数为 n,而且树的形状又较为均衡的话,比较大小和移动的次数最多就是 log2n。因此,时间复杂度为 O(logn)。但是,如果树的形状朝单侧纵向延伸,树就会变得很高,此时时间复杂度也就变成了 O(n)。
补充说明
有很多以二叉查找树为基础扩展的数据结构,比如“平衡二叉查找树”。这种数据
结构可以修正形状不均衡的树,让其始终保持均衡形态,以提高查找效率。
另外,虽然文中介绍的二叉查找树中一个结点最多有两个子结点,但我们可以把子
结点数扩展为 m(m 为预先设定好的常数)。像这种子结点数可以自由设定,并且形状均
衡的树便是 B 树。
以上是关于数据结构的主要内容,如果未能解决你的问题,请参考以下文章