<ROS; 机器人描述--URDF和XACRO
Posted 小贝也沉默
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了<ROS; 机器人描述--URDF和XACRO相关的知识,希望对你有一定的参考价值。
1. 关于URDF的一些杂谈
URDF(Unified Robot Description Format), 是一种特殊的xml文件格式, 作为机器人的一种描述文件, 在ROS里面大量使用. 接触ROS比较久的同学, 应该会经常见到一种类似命名的包(package) – xxx_description. 这个包里面就是包含某个机器人的描述文件. 比如pr2_decription, baxter_descrition, 以及ur_description等. 上述举例的机器人描述包都是可以通过apt-get的方式进行安装. 使用命令格式如斯: sudo apt-get install ros-indigo-pr2-descrition, 其中indigo是你所安装的ROS版本名, 后面就是所需要安装的包名, 下划线用中画线代替.
对机器人使用gazebo进行仿真时, 需要加载的机器人模型就是urdf模型, 当然, 单纯的urdf是不能精确描述机器人以及所需要仿真的世界的. gazebo对其进行了扩展, 感兴趣的朋友可以查看gazebo官网的一些教程. 其中会提供一些标签, 对系统动态, 重心等的设定.
如果想使用开源库moveit对机器人进行路径规划, 在moveit setup assistant教程中, 第一步就是关于如何将机器人模型导入进来, 导入的机器人模型就是urdf(导入xacro格式时也是先将其解析为urdf).
诸如这些应用, 当然还不限于这些应用, 可以看到, 了解URDF以及会使用URDF是一件很重要的事情. 而xacro文件, 是提供了一些更为高级编辑方式的宏文件. 这种格式的文件, 在使用时, 均先会调用rosrun xacro xacro.py xxx.urdf.xacro > xxx.urdf, 将其解析成对应的urdf文件. 然后再使用.
下述内容, 仅仅是对urdf文件编辑和查看由最基础的了解, 以方便能够看得懂机器人描述文件, 以及该怎么利用别人已经写好的描述文件进行组合, 重构得到自己的机器人描述文件. 如果是需要更详细, 精确的描述, 则还需要自己再去对urdf文件进行学习.
2. URDF文件
2.1 link 和 joint
在URDF教程中, 第一个出现的就是下图, 很形象的将URDF要定义的主要内容给展现了出来. 一般, 机器人都是由link和joint进行描述. 都会呈现为树状(想象数据结构里面的树), 如图1, 由一个根link(link1)向上, 分别出现了两个分支–link2和link3, 分别由joint连接link. link4就可以类似的理解.

了解机器人的一般描述方式之后, 我们来看一下下图中这个形状的机器人该怎么来描述它.
<robot name="test_robot">
<link name="link1" />
<link name="link2" />
<link name="link3" />
<link name="link4" />
<joint name="joint1" type="continuous">
<parent link="link1"/>
<child link="link2"/>
</joint>
<joint name="joint2" type="continuous">
<parent link="link1"/>
<child link="link3"/>
</joint>
<joint name="joint3" type="continuous">
<parent link="link3"/>
<child link="link4"/>
</joint>
</robot>从上述内容可以看到, 机器人最重要的两个内容 – link和joint, 是如何进行定义. 文件都定义了哪些标签, 以及该怎么使用. 其中内容很简单, 我就不浪费篇幅了.
细心的朋友肯定能够感受到, 虽然能够想象的出来大概是一个什么样子, 但是上面的内容是不能够唯一确定一个机器人或者一个…东西…, 因为每个link长什么样子?他们又是一个什么样子的位置关系? 这些在上面的内容中都是没有定义的. 如图中所示, 可能现在每一个不同的同学, 所联想到的样子都是不一样的, 一个仙人掌? 一个两指的夹持器? anythin..当然, 上面所示内容的urdf文件是不能够被正确解析的, 也是不能够可视化出来的. 但上面内容就类似于整个机器人的骨架, 机器人就由这些东西组成. 一共拥有4个link, 和3个joint, 像图中所示的样子连接起来.
2.2 位置
在定义好了机器人的骨架后, 进一步我们可以使用origin子标签进行定义link所应该在的位置. 但是有一点应该注意到, link和link之间是使用joint进行连接, 那么link的位置, 就由连接他的joint确定. 所以, 该子标签是定义在joint内. 在三维空间中, 要精确描述一个刚性体的姿态, 仅仅使用他的xyz坐标是不够的, 还需要使用rpy. rpy角是描述船舶在海中航行时姿态的一种方法. 将船的行驶方向取为z轴, 绕z轴旋转称为滚动(Roll), 绕y轴旋转称为俯仰(Pitch), 绕x轴旋转称为偏转(Yaw). 这种描述方式大量运用于各个领域. 依稀记得, kinect2关于脸部模型匹配的DEMO程序里面, 对脸部的描述就用到了这种描述方式来描述姿态. 在机器人中, 当然运用就更多了. 现在对之前的内容进行扩充. 其中rpy代表的是角度, 用弧度表示.
<robot name="test_robot">
<link name="link1" />
<link name="link2" />
<link name="link3" />
<link name="link4" />
<joint name="joint1" type="continuous">
<parent link="link1"/>
<child link="link2"/>
<origin xyz=".5 .3 0.7" rpy="0 0 0" />
</joint>
<joint name="joint2" type="continuous">
<parent link="link1"/>
<child link="link3"/>
<origin xyz="-.2 .5 -0.3" rpy="0 0 1.57" />
</joint>
<joint name="joint3" type="continuous">
<parent link="link3"/>
<child link="link4"/>
<origin xyz=".5 0 0.2" rpy="0 0 -1.57" />
</joint>
</robot>上述位置关系定义如下图所示. xyz就如同一个平移向量, 将下一个link的原点坐标移动到下一个位置(起点是父link的原点). 同时, 你也可以多尝试几次rpy, 体会下一个坐标系是如何进行变换的. 虽然现在还没有任何东西出来, 但每个link的空间位置以及姿态已经被我们所指定了.

2.3 形状
在解决了每个link的相对位置之后, 还有一个很关键的问题, 就是每个link长什么样子呢? 圆的? 扁的? 还是奇形怪状的? 下面示例了一些常用的形状, 以及可能会导入的一些奇形怪状的东西. 不但可以导入stl格式的文件, 还可以导入dae格式.下述示例中导入了一个小刀.
<?xml version="1.0"?>
<robot name="test_robot">
<link name="link1">
<visual>
<geometry>
<cylinder length="0.6" radius="0.2" />
</geometry>
</visual>
</link>
<link name="link2">
<visual>
<geometry>
<box size="0.6 0.2 .1" />
</geometry>
</visual>
</link>
<link name="link3" >
<visual>
<geometry>
<sphere radius="0.2"/>
</geometry>
</visual>
</link>
<link name="link4" >
<visual>
<origin rpy="0 -1.57 0" xyz="0 0 0"/>
<geometry>
<mesh filename="package://urdf_csdn/urdf/mesh/knife.stl"/>
</geometry>
</visual>
</link>
<joint name="joint1" type="fixed">
<parent link="link1"/>
<child link="link2"/>
<origin xyz="0.22 0 0.6" rpy="0 1.57 0" />
</joint>
<joint name="joint2" type="continuous">
<parent link="link1"/>
<child link="link3"/>
<origin xyz="-0.1 0.5 0" />
</joint>
<joint name="joint3" type="fixed">
<parent link="link3"/>
<child link="link4"/>
<origin xyz=".5 0 0" rpy="0 0 -1.57" />
</joint>
</robot>2.4 Collision 和 joint限制
当然, 每个link一般是不会产生重合的, 在运动规划的时候, 也会去避免碰撞到自己, 所以针对于每一个link, 还有一个collision标签, 和visual标签内容完全一样.
前面内容可以看到, 每个link可以看作是一个刚体, 刚体和刚体之间是通过joint进行连接, 那么, 问题就来了. 这个joint是固定的? 还是可以任意的动? 如果可以动, 那么, 问题又来了, 极限位置是多少? 等等等等…
比如, 我们限定joint2只能沿着y轴旋转, 则需要添加<axis xyz="0 1 0"/>, 类似的, 可以指定其他关节的转动轴, 例如<axis xyz="-0.2 0.1 1"/>.
比如, 我们要限定joint2的移动范围, 则需要添加<limit lower="-3.14" upper="3.14" effort="150.0" velocity="3.15"/>, 从标签中可以看到, 上下限以及速度, 力矩等都是可以指定的.
<?xml version="1.0"?>
<robot name="test_robot">
<link name="link1">
<visual>
<geometry>
<cylinder length="0.6" radius="0.2" />
</geometry>
</visual>
<collision>
<origin xyz="0.0 0 0.0" rpy="0 0 0" />
<geometry>
<cylinder length="0.6" radius="0.2" />
</geometry>
</collision>
</link>
<link name="link2">
<visual>
<geometry>
<box size="0.6 0.2 .1" />
</geometry>
</visual>
</link>
<link name="link3" >
<visual>
<geometry>
<sphere radius="0.2"/>
</geometry>
</visual>
</link>
<link name="link4" >
<visual>
<origin rpy="0 -1.57 0" xyz="0 0 0"/>
<geometry>
<mesh filename="package://urdf_csdn/urdf/mesh/knife.stl"/>
</geometry>
</visual>
</link>
<joint name="joint1" type="fixed">
<parent link="link1"/>
<child link="link2"/>
<origin xyz="0.22 0 0.6" rpy="0 1.57 0" />
</joint>
<joint name="joint2" type="continuous">
<parent link="link1"/>
<child link="link3"/>
<origin xyz="-0.1 0.5 0" />
<axis xyz="0 1 0"/>
<limit lower="-3.14" upper="3.14" effort="150.0" velocity="3.15"/>
</joint>
<joint name="joint3" type="fixed">
<parent link="link3"/>
<child link="link4"/>
<origin xyz=".5 0 0" rpy="0 0 -1.57" />
</joint>
</robot>2.5 可视化
查看urdf文件, 可以使用urdf_tutorial包, 命令格式roslaunch urdf_tutorial display.launch model:=path/to/your/xxx.urdf, 会使用Rviz进行显示, 如上述内容, 进行显示之后, 可以得到下图所示内容. 坐标系图示, 需要添加TF条目进行显示. 值得注意的地方, 将Global Options中的fixed frame设定为link1. 如果你设定了可移动的关节, 想查看以下关节移动的效果以及设定等, 使用roslaunch urdf_tutorial display.launch model:=path/to/your/xxx.urdf gui:=true, 你会看到弹出一个控制面板(如果没找到, 再好好找一找, 或许真的很小).

通过上述方式, 在rviz中正确显示模型之后, 新打开一个命令行, 输入rostopic list命令, 可以查看到类似如下的输出. 可以看到, 开启了/joint_states话题(Topic), 使用rostopic echo /joint_states可以看到话题数据.

3. XACRO文件
前面也提到了, XACRO文件和URDF实质上是等价的. XACRO格式提供了一些更高级的方式来组织编辑机器人描述. 主要提供了三种方式来使得整个描述文件变得简单. 借用在教程中一句话来形容xacro的优势: “Fortunately, you can use the xacro package to make your life simpler”.
3.1 Constants
Usage: <xacro:property name="WIDTH" value="2.0"/>
类似于C语言中的宏定义, 在头部定义, 如<xacro:property name="WIDTH" value="2.0"/>, 以$WIDTH的方式进行使用. 经常会看到的一个常量定义, <property name="PI" value="3.14159265" />. 还有定义一个前缀, 这样后面关节名都可以方便的进行修改. 比如<property name="prefix" value="my_"/>, 后面关节名字就可以类似的进行更新. <joint name="$prefixjoint1" type="revolute"/>.
在有了上面的常量定义之后, 类似于宏定义, 完成字符串替换, 同时还可以进行一些简单的数学运算.
Usage: $1/2, $PI*(WIDTH*0.5)
3.2 Macros
这个才是xacro文件中最重要的部分. 就像宏函数一样, 完成一些最小模块的定义, 方便重用, 以及可以使用参数来标识不同的部分.
3.2.1 Simple Macro
Usage:
<xacro:macro name="default_origin">
<origin xyz="0 0 0" rpy="0 0 0"/>
</xacro:macro>
<xacro:default_origin />前面三行对宏进行定义, 第四行是使用.
3.2.2 Parameterized Macro
Usage:
<xacro:macro name="default_link" params="prefix">
<link name="$prefix_link1" />
</xacro:macro>
<xacro:default_link prefix="my" />类似, 前三行定义, 第四行是进行使用. 当然, 不单由这样简单的参数, 还可以使用块参数.
Usage:
<xacro:macro name="default_link" params="prefix *origin">
<link name="$prefix_link1" >
<xacro:insert_block name="prigin" />
</link>
</xacro:macro>
<xacro:default_link prefix="my">
<origin xyz="0 0 0" rpy="0 0 0" />
</xacro:default_link>一般情况下, 很多已有的机器人模型, 都是以xacro格式提供描述, 而在xacro文件中, 整个机器人定义为一个很大的宏. 例如, barrett hand, 想进一步了解的朋友可以点击前面的链接, 查看以下barrett hand是如何进行描述的.
3.2.3 Include
很多模型都是已宏的形式进行定义, 并以最小集团分成很多个文件. 而最终的机器人描述就变得非常简单了. 下面摘录一个ur5的描述文件. 从中可以看出来xacro的强大优势. 在最后的示例中我们还能够看到, urdf文件也是能够直接导入进来的.
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro" name="ur5" >
<!-- common stuff -->
<xacro:include filename="$(find ur_description)/urdf/ur5/common.gazebo.xacro" />
<!-- ur5 -->
<xacro:include filename="$(find ur_description)/urdf/ur5/ur5.urdf.xacro" />
<!-- arm -->
<xacro:ur5_robot prefix="" joint_limited="false"/>
<link name="world" />
<joint name="world_joint" type="fixed">
<parent link="world" />
<child link = "base_link" />
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" />
</joint>
</robot>当然, 此时的简单是建立在之前的复杂的基础上的. 从上述内容中可以看到, 首先是在ur_description包中找到另外几个xacro文件, 将其包含进来. 当然应该注意到, include类似于C语言中的include, 先将该文件扩展到包含的位置. 但包含进来的文件很有可能只是一个参数宏的定义. 并没有被调用. 所以, 示例中调用了一个宏(<xacro:ur5_robot prefix="" joint_limited="false"/>), 产生一个ur5机器人.
3.3 可视化
urdf_tutorial包也是可以查看xacro文件的. 使用roslaunch urdf_tutorial xacrodisplay.launch model:=path/to/your/xxx.urdf.xacro.
4. 关于urdf_tutorial
前面提到的可视化都是使用urdf_tutorial包进行的. 分别调用了两个launch文件. 在上面的示例中我们还看到了不但会使用rviz进行可视化, 还会发起一些话题等. 其实这些我们能够从他的launch文件中一窥究竟.
打开命令行, 输入: rosed urdf_tutorial dispaly.launch. 会使用vim打开该文件. 可以看到下述内容.
<launch>
<arg name="model" />
<arg name="gui" default="False" />
<param name="robot_description" textfile="$(arg model)" />
<param name="use_gui" value="$(arg gui)"/>
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" />
<node name="robot_state_publisher" pkg="robot_state_publisher" type="state_publisher" />
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find urdf_tutorial)/urdf.rviz" required="true" />
</launch>由上可以看到, 参数model是没有默认值的, 所以调用该launch文件必须指定model参数. 其他都比较易懂, 主要解释以下robot_description, 可以看到, 其前面是param. 这个是指定ros 参数服务器中的参数值. 而打开rviz之后, rviz就是直接从参数服务器中读取机器人描述文件, 也就是这个参数. 然后进行显示. use_gui也是如此对显示产生的影响. 另外, 还发起了两个发布者节点, 分别发布joint_states和robot_state. 这也就是会由joint_states话题的原因. xacrodispaly.launch文件和上面类似, 但在处理文件时, 使用的是: <param name="robot_description" command="$(find xacro)/xacro.py $(arg model)" />. 在launch中将xacro文件解析为urdf.
至于其中启动的两个节点, joint_state_publisher 和 robot_state_publisher, 可以查看ROS Answer上相关的解释. 另外, 在robot_state_publisher概述中提到, robot_state_publisher从/joint_states话题中获取机器人joint角度作为输入, 使用机器人的运动学树模型计算出机器人link的3D姿态, 然后将其发布到话题/tf和 /tf_static. joint_state_publisher从ROS参数服务器中读取robot_description参数, 找到所有non-fixed joint, 发布他们的JointState消息到/joint_states话题.
5. 排列组合
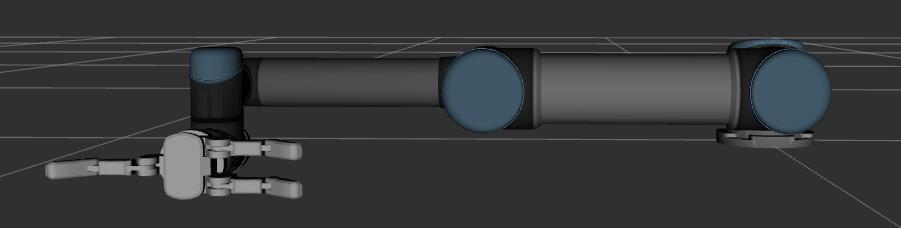
5.1 UR + Barrett
有了前面的基础之后, 我们就可以进行一些属于我们自己的私人定制了. 比如说, 使用ur5作为手臂, 接上barrett hand或者shadow hand. 这样就可以得到一个完整的操作模型了. 先看一下效果.
UR Description
首先需要下载所需要的UR机械臂的包, 打开命令行, 输入: git clone https://github.com/ros-industrial/universal_robot.git, 下载下来之后, 在universal_robot文件夹内有一个叫ur_description文件夹, 这里面就是我们需要的机器人描述文件.
* Barrett Hand Description*
在https://github.com/RobotnikAutomation/barrett_hand/tree/hydro-devel中, 下载得到bhand_description, 就是我们所需要的barrett hand描述文件.
* 组合 *
将前面得到的ur_description和bhand_description拷贝到catkin_ws目录下(确保能够找到这两个包), 到catkin_ws目录下, 运行catkin_make. 注意查看提示信息, 是否发现ur_description和bhand_description这两个包.
以下述内容新建一个文件, 以xxx.urdf.xacro格式命名. 运行roslaunch urdf_tutorial xacrodisplay.launch model:=path/to/your/xxx.urdf.xacro来进行显示. 最终结果就如上图所示. 从下面的描述来看, 是不是很简洁?
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro" name="ur5bh" >
<!-- common stuff -->
<xacro:include filename="$(find ur_description)/urdf/common.gazebo.xacro" />
<!-- ur5 -->
<xacro:include filename="$(find ur_description)/urdf/ur5.urdf.xacro" />
<!-- barrett hand -->
<xacro:include filename="$(find bhand_description)/urdf/bh282.urdf.xacro" />
<!-- arm -->
<xacro:ur5_robot prefix="" joint_limited="true"/>
<link name="world" />
<joint name="world_joint" type="fixed">
<parent link="world" />
<child link = "base_link" />
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" />
</joint>
<!-- end effector -->
<xacro:bhand_macro parent="ee_link" name="bh">
<origin xyz="0.012 0.0 0.0" rpy="$pi/2.0 $pi/2.0 $pi/2.0"/>
</xacro:bhand_macro>
</robot>5.2 Baxter + YCB
有些时候, 我们不但需要机器人, 同时还需要一些场景, 比如机器人面前的一个桌子, 桌子上面放一些物品等, 或者一些稀奇古怪的东西, 放在机器人旁边, 和机器人一起导入来运行. 就比如下图所示的样子.

* Baxter *
可以使用另外一种方式来获取Baxter的描述文件. 打开命令行, 以此输入:
$ sudo apt-get install ros-indigo-baxter-description
$ cd ~/catkin_ws/src/
$ cp -r /opt/ros/indigo/baxter_description ./
$ rosrun xacro xacro.py --inorder baxter_description/urdf/baxter.urdf.xacro\\
> baxter_description/urdf/baxter_new.urdf如上所述, 一定得注意最后一条指令, 可以参考Github上xacro的一条Issues, 其中一定需要添加--inorder, 参数. 否则生成模型会失败. 所以我们提前将baxter的xacro文件转换成urdf格式.
* The YCB Object and Model Set *
在http://rll.eecs.berkeley.edu/ycb/上, 可以下载到一些物体的三维模型以及urdf文件. 进入网站之后, 点击下载ROS packages for setup descriptions of ‘Pitcher-Mug Protocol’ and ‘Table Setting Protocol’ in Gazebo simulation environment. 将下载下来的文件解压到和前述文件中的同级目录中. 其中有一些launch文件, 可以运行起来, 看一看效果. 挺好玩的.
* 排列 *
所有东西都准备好之后, 将下述内容拷贝到一个新的xacro文件中. 和之前一样, 运行并显示. 可以得到前述图像中的样子. 和之前的类似, viz打开之后, 需要将Fixed Frame设定成world, 模型才能正常显示.
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro" name="baxter_and_world" >
<link name="world"/>
<joint name="world_to_baxter" type="fixed">
<parent link="world"/>
<child link="base"/>
</joint>
<!-- baxter -->
<xacro:include filename="$(find baxter_description)/urdf/baxter_new.urdf" />
<!-- table -->
<xacro:include filename="$(find ycb_object_models)/models/urdf/table.urdf" />
<joint name="base_table" type="fixed" >
<parent link="world"/>
<child link="table_top_link"/>
<origin xyz="1 0 -0.7" />
</joint>
</robot>以上是关于<ROS; 机器人描述--URDF和XACRO的主要内容,如果未能解决你的问题,请参考以下文章