Vulcanexus机器人操作系统ROS2一站式工具集(Galactic+Humble)
Posted zhangrelay
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了Vulcanexus机器人操作系统ROS2一站式工具集(Galactic+Humble)相关的知识,希望对你有一定的参考价值。
什么是Vulcanexus?
Vulcanexus 是用于开发机器人应用程序的开源软件堆栈。 它提供了各种库和工具,用于轻松和个性化地配置机器人项目。 Vulcanexus 是一个一体化的 ROS 2 工具集,可确保固定的 DDS 中间件、Fast DDS,并包括选定的组件以提供优化的机器人开发。
Vulcanexus 是:
- ROS 2 + 快速 DDS
- ROS 2 发现服务器
- ROS 2 路由器
- ROS 2 监视器
- ROS 2 形状演示
- Micro-ROS
- Webbots(模拟,通过网络机器人)
将所有这些结合在一起的一些优点:
1.- 新工具:Vulcanexus 提供诸如 ROS 2 路由器(云应用程序)、ROS 2 Monitor(监控 ROS 2 协议统计数据)和 ROS 2 Shapes Demo(许多示例应用程序的便捷演示)等工具。这些工具以前不可用。
2.- 简单性:无需搜索工具的版本和运行所有工具所需的配置,而是创建了所需的一切,让生活更轻松:Dockers、Debian repos、通用文档、示例和演示混合在一起, 而这仅仅是个开始。
3.- 端到端解决方案:从云到微控制器,采用整体方法。
4.- 意识:正在大力推广这些工具,最好集中精力而不是每个组件都这样做。通过这种方式,提高意识,帮助社区了解如何一起使用这些工具,并希望增加 Vulcanexus a 和 ROS 2 的采用率。
5.- 始终更新:Vulcanexus 将始终拥有我们的中间件和工具的最新版本,从而更快地将新功能引入社区。
还在用远古方式开发机器人APP?还在钻木取火?
要不要尝试一下最新最酷的机器人操作系统ROS2生态?
ROS 2 Humble Hawksbill 丰富和成熟生态扩展
酷炫的主页:

完善的文档:
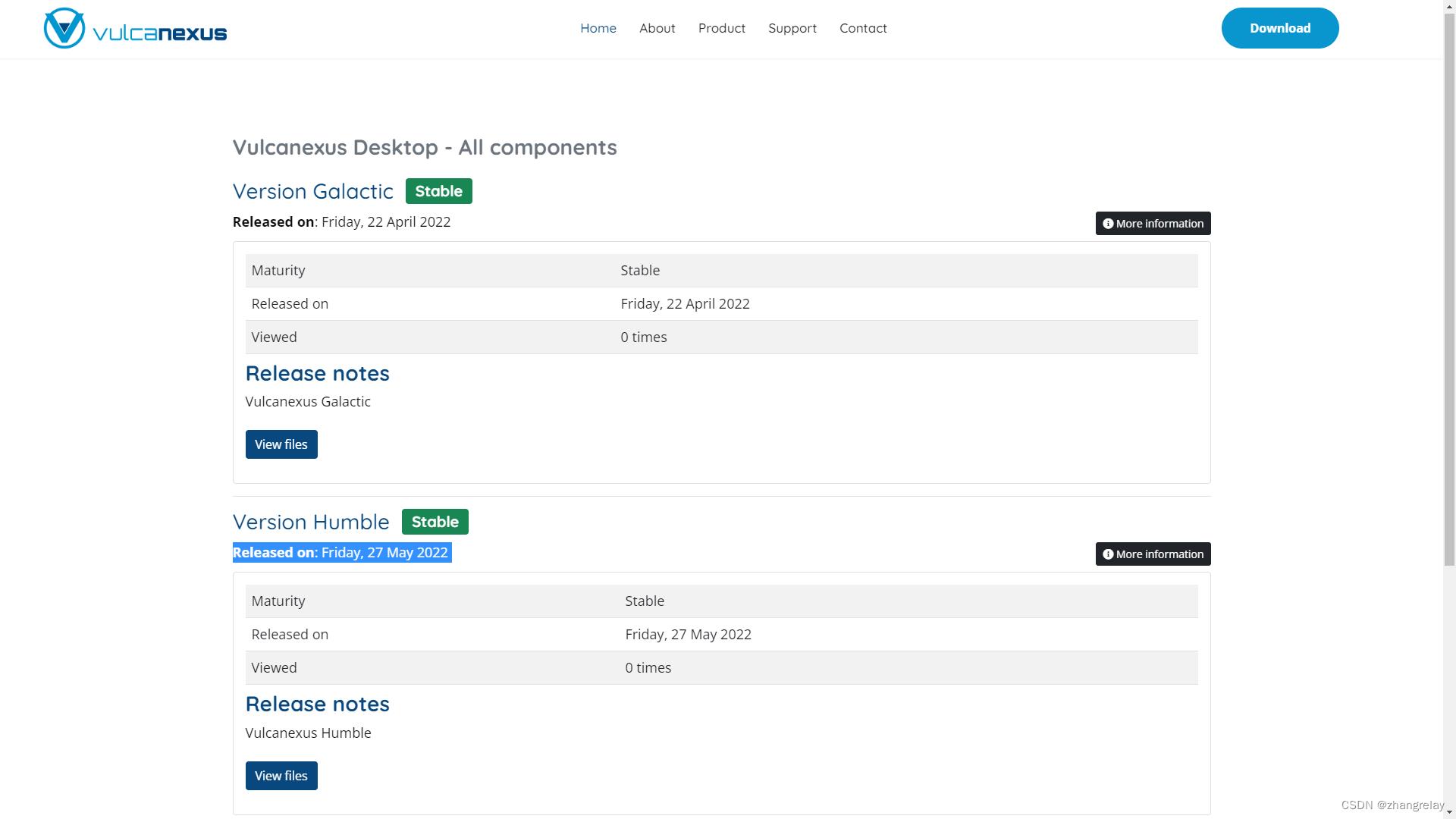
支持Galactic和Humble:
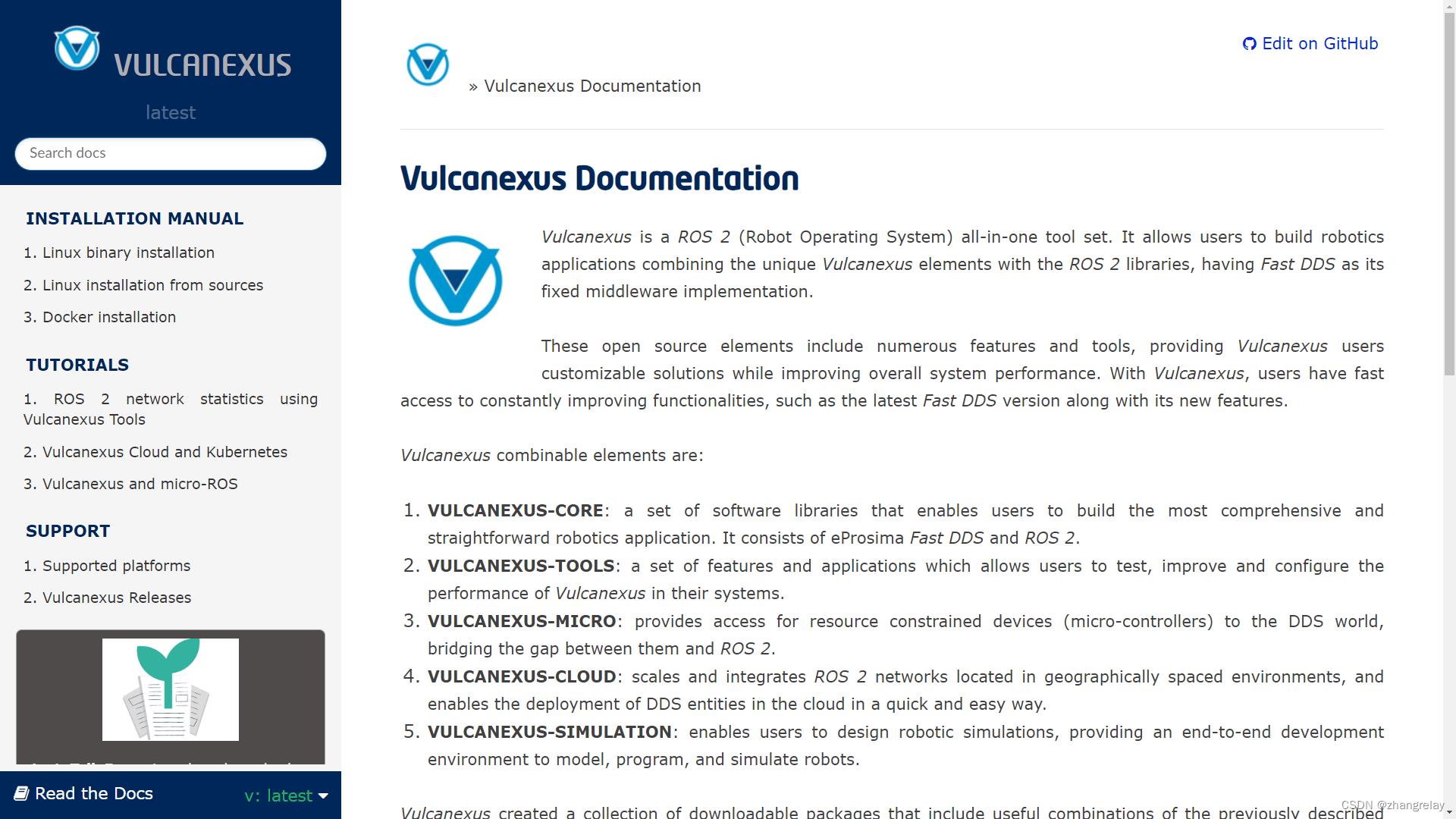
Vulcanexus 是 ROS 2(机器人操作系统)一体化工具集。它允许用户构建机器人应用程序,将独特的 Vulcanexus 元素与 ROS 2 库相结合,将 Fast DDS 作为其固定的中间件实现。
这些开源元素包括众多功能和工具,为 Vulcanexus 用户提供可定制的解决方案,同时提高整体系统性能。使用 Vulcanexus,用户可以快速访问不断改进的功能,例如最新的 Fast DDS 版本及其新功能。
Vulcanexus 可组合元素是:
- VULCANEXUS-CORE:一组软件库,使用户能够构建最全面、最直接的机器人应用程序。它由 eProsima Fast DDS 和 ROS 2 组成。
- VULCANEXUS-TOOLS:一组功能和应用程序,允许用户在其系统中测试、改进和配置 Vulcanexus 的性能。
- VULCANEXUS-MICRO:为资源受限的设备(微控制器)提供对 DDS 世界的访问,弥合它们与 ROS 2 之间的差距。
- VULCANEXUS-CLOUD:扩展和集成位于地理空间环境中的 ROS 2 网络,并支持在云中快速轻松地部署 DDS 实体。
- VULCANEXUS-SIMULATION:使用户能够设计机器人仿真,为机器人建模、编程和仿真提供端到端的开发环境。
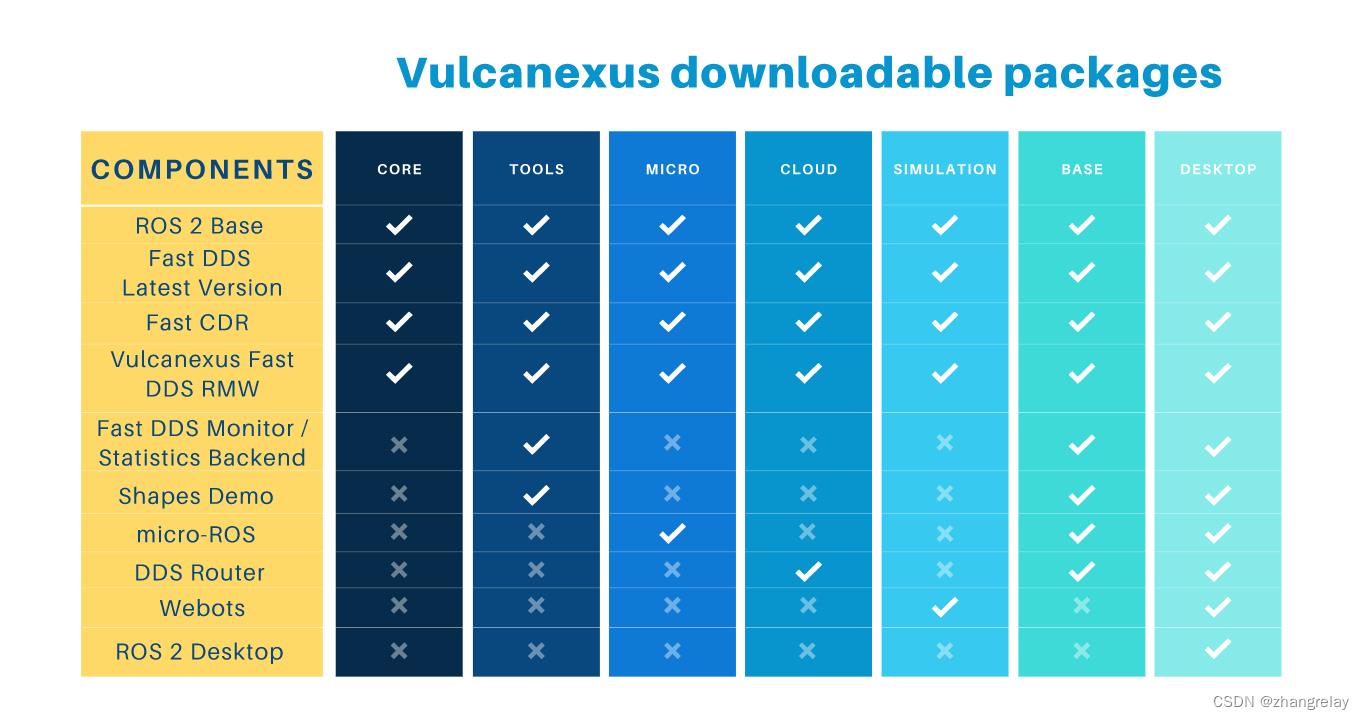
Vulcanexus 创建了一系列可下载的软件包,其中包括前面描述的元素与 ROS 2 的有用组合:
官方文档包括安装每个 Vulcanexus 软件包的说明、一些帮助用户入门的教程以及支持的平台和版本。
Vulcanexus 维护多个版本,具有不同的支持周期。 每年都会发布一个新的 Vulcanexus 主要版本。 这个主要版本有一个由形容词和火山名称组成的代号,两者都以相同的字母开头,其中第一个是 Galactic Gamble (v1.0.0)。 在任何版本的支持期内,都可能有次要版本和补丁版本,它们要么以 ABI 兼容的方式添加新功能,要么修复可能的问题。 每隔一年,就会发布一个长期版本 (LTS),其中第一个是 H 版本(2022 年 5 月)。 在此期间,LTS 发布了一个短期版本,该版本将在更短的时间内获得支持。
以上是关于Vulcanexus机器人操作系统ROS2一站式工具集(Galactic+Humble)的主要内容,如果未能解决你的问题,请参考以下文章