Python实现图像的全景拼接,毕设选题
Posted 朝阳区靓仔_James
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了Python实现图像的全景拼接,毕设选题相关的知识,希望对你有一定的参考价值。
基本介绍
图像的全景拼接,即“缝合”两张具有重叠区域的图来创建一张全景图。其中用到了计算机视觉和图像处理技术有:关键点特征检测、局部不变特征、关键特征点匹配、RANSAC(Random Sample Consensus,随机采样一致性)和透视变形。
具体步骤
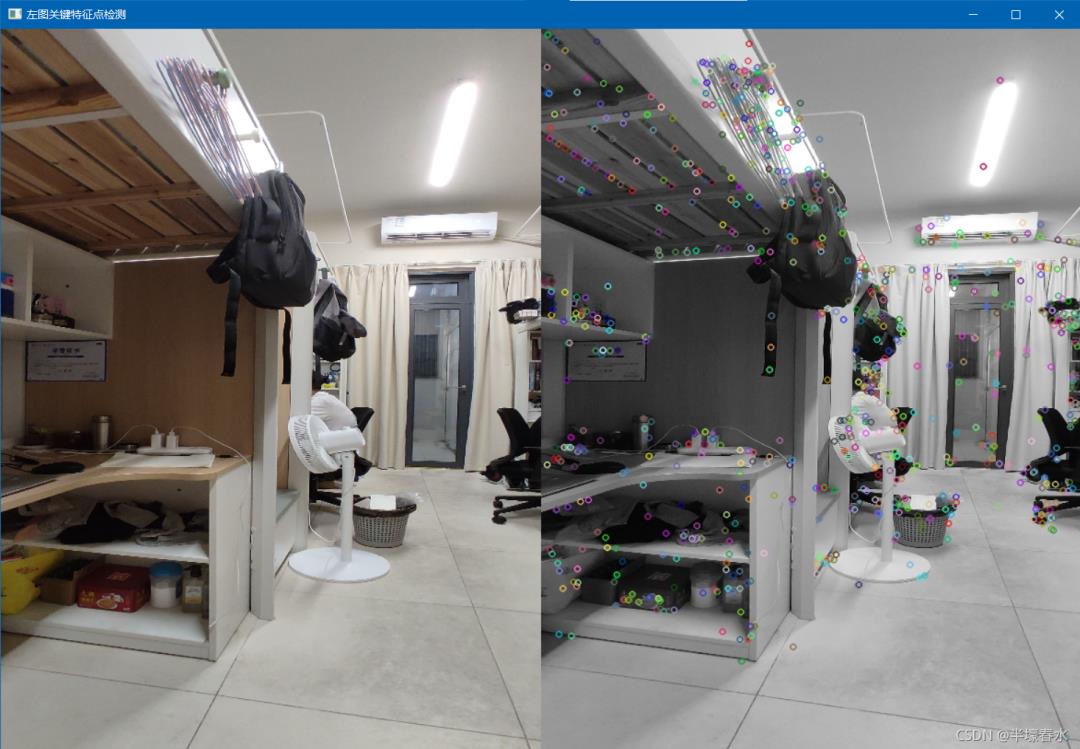
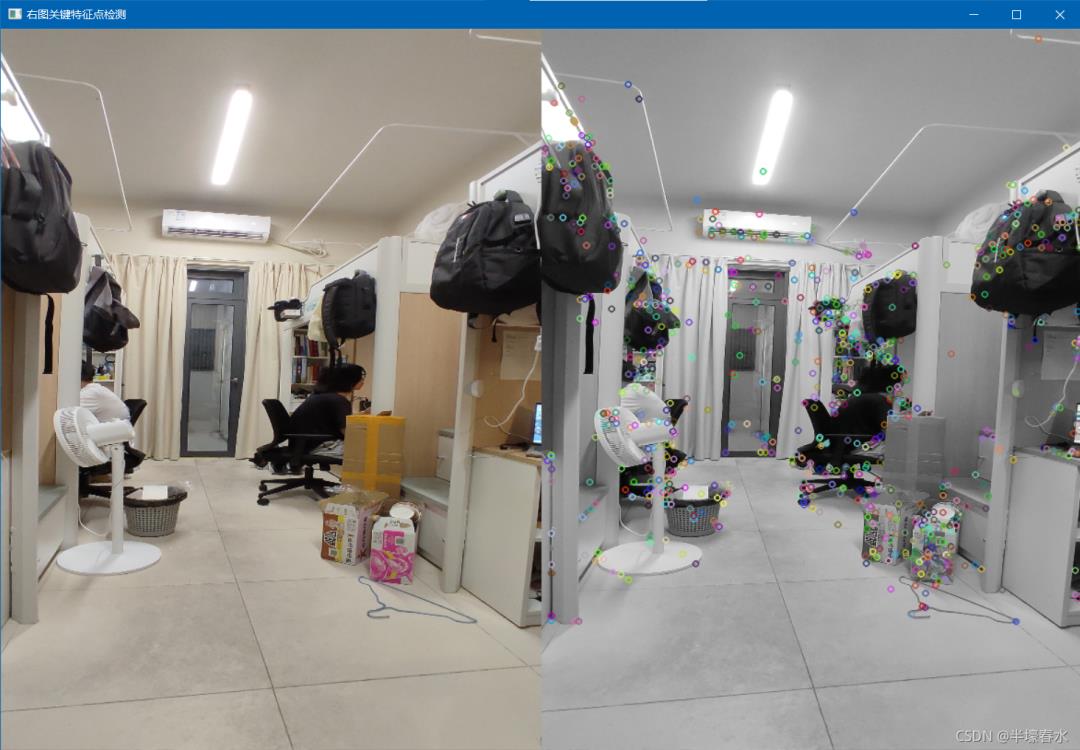
(1)检测左右两张图像的SIFT关键特征点,并提取局部不变特征 ;
(2)使用knnMatch检测来自右图(左图)的SIFT特征,与左图(右图)进行匹配 ;
(3)计算视角变换矩阵H,用变换矩阵H对右图进行扭曲变换;
(4)将左图(右图)加入到变换后的图像的左侧(右侧)获得最终图像;
代码:
import cv2 as cv # 导入opencv包
import numpy as np # 导入numpy包,图像处理中的矩阵运算需要用到
# 检测图像的SIFT关键特征点
def sift_keypoints_detect(image):
# 处理图像一般很少用到彩色信息,通常直接将图像转换为灰度图
gray_image = cv.cvtColor(image, cv.COLOR_BGR2GRAY)
# 获取图像特征sift-SIFT特征点,实例化对象sift
sift = cv.xfeatures2d.SIFT_create()
# keypoints:特征点向量,向量内的每一个元素是一个KeyPoint对象,包含了特征点的各种属性信息(角度、关键特征点坐标等)
# features:表示输出的sift特征向量,通常是128维的
keypoints, features = sift.detectAndCompute(image, None)
# cv.drawKeyPoints():在图像的关键特征点部位绘制一个小圆圈
# 如果传递标志flags=cv.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS,它将绘制一个大小为keypoint的圆圈并显示它的方向
# 这种方法同时显示图像的坐标,大小和方向,是最能显示特征的一种绘制方式
keypoints_image = cv.drawKeypoints(
gray_image, keypoints, None, flags=cv.DRAW_MATCHES_FLAGS_NOT_DRAW_SINGLE_POINTS)
# 返回带关键特征点的图像、关键特征点和sift的特征向量
return keypoints_image, keypoints, features
# 使用KNN检测来自左右图像的SIFT特征,随后进行匹配
def get_feature_point_ensemble(features_right, features_left):
# 创建BFMatcher对象解决匹配
bf = cv.BFMatcher()
# knnMatch()函数:返回每个特征点的最佳匹配k个匹配点
# features_right为模板图,features_left为匹配图
matches = bf.knnMatch(features_right, features_left, k=2)
# 利用sorted()函数对matches对象进行升序(默认)操作
matches = sorted(matches, key=lambda x: x[0].distance / x[1].distance)
# x:x[]字母可以随意修改,排序方式按照中括号[]里面的维度进行排序,[0]按照第一维排序,[2]按照第三维排序
# 建立列表good用于存储匹配的点集
good = []
for m, n in matches:
# ratio的值越大,匹配的线条越密集,但错误匹配点也会增多
ratio = 0.6
if m.distance < ratio * n.distance:
good.append(m)
# 返回匹配的关键特征点集
return good
# 计算视角变换矩阵H,用H对右图进行变换并返回全景拼接图像
def Panorama_stitching(image_right, image_left):
_, keypoints_right, features_right = sift_keypoints_detect(image_right)
_, keypoints_left, features_left = sift_keypoints_detect(image_left)
goodMatch = get_feature_point_ensemble(features_right, features_left)
# 当筛选项的匹配对大于4对(因为homography单应性矩阵的计算需要至少四个点)时,计算视角变换矩阵
if len(goodMatch) > 4:
# 获取匹配对的点坐标
ptsR = np.float32(
[keypoints_right[m.queryIdx].pt for m in goodMatch]).reshape(-1, 1, 2)
ptsL = np.float32(
[keypoints_left[m.trainIdx].pt for m in goodMatch]).reshape(-1, 1, 2)
# ransacReprojThreshold:将点对视为内点的最大允许重投影错误阈值(仅用于RANSAC和RHO方法时),若srcPoints和dstPoints是以像素为单位的,该参数通常设置在1到10的范围内
ransacReprojThreshold = 4
# cv.findHomography():计算多个二维点对之间的最优单映射变换矩阵 H(3行x3列),使用最小均方误差或者RANSAC方法
# 函数作用:利用基于RANSAC的鲁棒算法选择最优的四组配对点,再计算转换矩阵H(3*3)并返回,以便于反向投影错误率达到最小
Homography, status = cv.findHomography(
ptsR, ptsL, cv.RANSAC, ransacReprojThreshold)
# cv.warpPerspective():透视变换函数,用于解决cv2.warpAffine()不能处理视场和图像不平行的问题
# 作用:就是对图像进行透视变换,可保持直线不变形,但是平行线可能不再平行
Panorama = cv.warpPerspective(
image_right, Homography, (image_right.shape[1] + image_left.shape[1], image_right.shape[0]))
cv.imshow("扭曲变换后的右图", Panorama)
cv.waitKey(0)
cv.destroyAllWindows()
# 将左图加入到变换后的右图像的左端即获得最终图像
Panorama[0:image_left.shape[0], 0:image_left.shape[1]] = image_left
# 返回全景拼接的图像
return Panorama
if __name__ == '__main__':
# 读取需要拼接的图像,需要注意图像左右的顺序
image_left = cv.imread("./Left.jpg")
image_right = cv.imread("./Right.jpg")
# 通过调用cv2.resize()使用插值的方式来改变图像的尺寸,保证左右两张图像大小一致
# cv.resize()函数中的第二个形参dsize表示输出图像大小尺寸,当设置为0(None)时,则表示按fx与fy与原始图像大小相乘得到输出图像尺寸大小
image_right = cv.resize(image_right, None, fx=0.4, fy=0.24)
image_left = cv.resize(image_left, (image_right.shape[1], image_right.shape[0]))
# 获取检测到关键特征点后的图像的相关参数
keypoints_image_right, keypoints_right, features_right = sift_keypoints_detect(image_right)
keypoints_image_left, keypoints_left, features_left = sift_keypoints_detect(image_left)
# 利用np.hstack()函数同时将原图和绘有关键特征点的图像沿着竖直方向(水平顺序)堆叠起来
cv.imshow("左图关键特征点检测", np.hstack((image_left, keypoints_image_left)))
# 一般在imshow后设置 waitKey(0) , 代表按任意键继续
cv.waitKey(0)
# 删除先前建立的窗口
cv.destroyAllWindows()
cv.imshow("右图关键特征点检测", np.hstack((image_right, keypoints_image_right)))
cv.waitKey(0)
cv.destroyAllWindows()
goodMatch = get_feature_point_ensemble(features_right, features_left)
# cv.drawMatches():在提取两幅图像特征之后,画出匹配点对连线
# matchColor – 匹配的颜色(特征点和连线),若matchColor==Scalar::all(-1),颜色随机
all_goodmatch_image = cv.drawMatches(
image_right, keypoints_right, image_left, keypoints_left, goodMatch, None, None, None, None, flags=2)
cv.imshow("所有匹配的SIFT关键特征点连线", all_goodmatch_image)
cv.waitKey(0)
cv.destroyAllWindows()
# 把图片拼接成全景图并保存
Panorama = Panorama_stitching(image_right, image_left)
cv.namedWindow("全景图", cv.WINDOW_AUTOSIZE)
cv.imshow("全景图", Panorama)
cv.imwrite("./全景图.jpg", Panorama)
cv.waitKey(0)
cv.destroyAllWindows()
左图关键特征点检测
右图关键特征点检测
所有匹配的SIFT关键特征点连线

扭曲变换后的右图

全景图

由于输入的左右图像之间有大量重叠,导致全景图的主要添加部分是在拼接图像的右侧,因此会造成拼接后全景图右侧有大量的黑色空白区域。
关于Python技术储备
学好 Python 不论是就业还是做副业赚钱都不错,但要学会 Python 还是要有一个学习规划。最后大家分享一份全套的 Python 学习资料,给那些想学习 Python 的小伙伴们一点帮助!
一、Python所有方向的学习路线
Python所有方向的技术点做的整理,形成各个领域的知识点汇总,它的用处就在于,你可以按照上面的知识点去找对应的学习资源,保证自己学得较为全面。(文末获取!)
温馨提示:篇幅有限,已打包文件夹,获取方式在“文末”!!!
二、Python必备开发工具

三、精品Python学习书籍
当我学到一定基础,有自己的理解能力的时候,会去阅读一些前辈整理的书籍或者手写的笔记资料,这些笔记详细记载了他们对一些技术点的理解,这些理解是比较独到,可以学到不一样的思路。
四、Python视频合集
观看零基础学习视频,看视频学习是最快捷也是最有效果的方式,跟着视频中老师的思路,从基础到深入,还是很容易入门的。
五、实战案例
光学理论是没用的,要学会跟着一起敲,要动手实操,才能将自己的所学运用到实际当中去,这时候可以搞点实战案例来学习。

六、Python练习题
检查学习结果。
七、面试资料
我们学习Python必然是为了找到高薪的工作,下面这些面试题是来自阿里、腾讯、字节等一线互联网大厂最新的面试资料,并且有阿里大佬给出了权威的解答,刷完这一套面试资料相信大家都能找到满意的工作。


这份完整版的Python全套学习资料已经上传CSDN,朋友们如果需要可以微信扫描下方CSDN官方认证二维码免费领取【保证100%免费】
以上是关于Python实现图像的全景拼接,毕设选题的主要内容,如果未能解决你的问题,请参考以下文章