实验7 蓝桥ROS1使用外设 适用kinetic/melodic/noetic
Posted zhangrelay
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了实验7 蓝桥ROS1使用外设 适用kinetic/melodic/noetic相关的知识,希望对你有一定的参考价值。
内容:使用游戏手柄、使用RGBD传感器,ROS摄像头驱动、ROS与OpenCV库、标定摄像头、视觉里程计,点云库、可视化点云、滤波和缩减采样、配准与匹配、点云分区
记录:
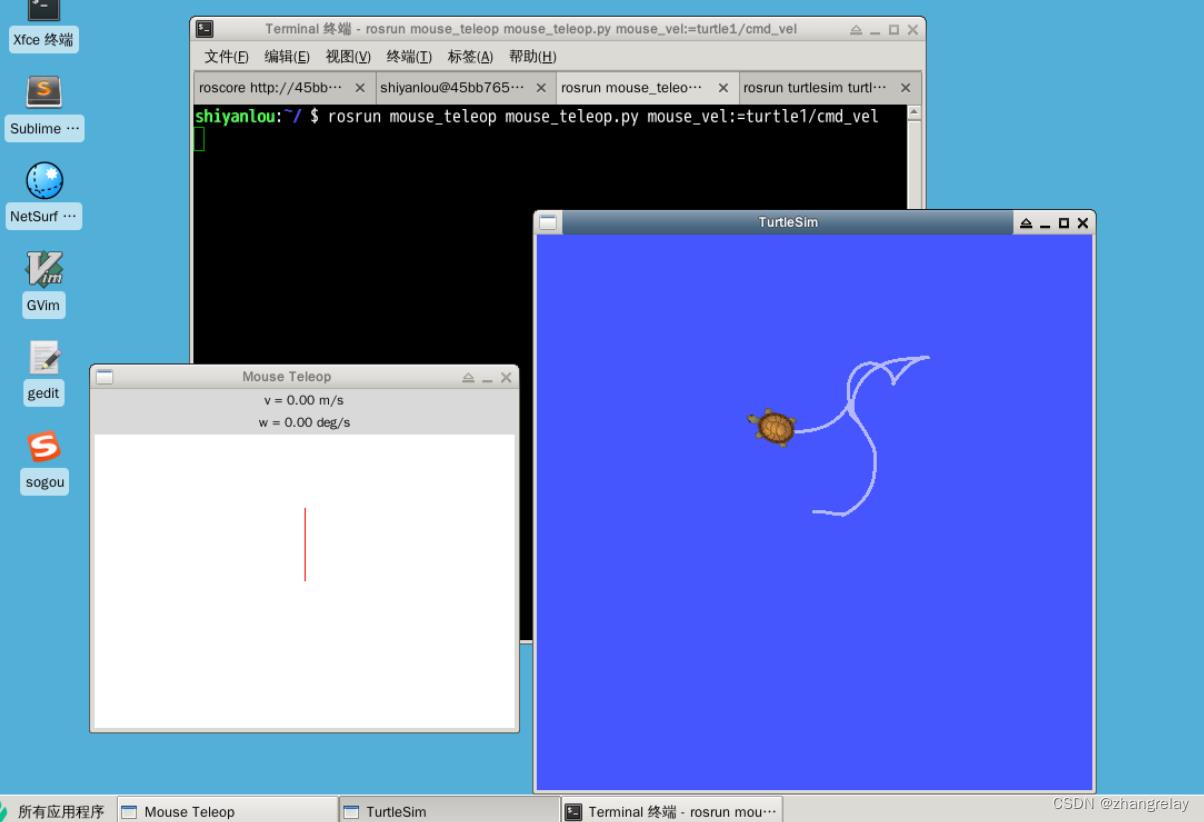
遥控小乌龟有多少种方式?
键盘/游戏手柄/鼠标/触摸屏等。
sudo apt install ros-kinetic-mouse-teleop
ros-kinetic-joy-teleop ros-kinetic-key-teleop ros-kinetic-teleop-tools-msgs
<launch>
<arg name="mouse_vel" default="mouse_vel"/>
<arg name="holonomic" default="false"/>
<arg name="plot" default="false"/>
<node pkg="mouse_teleop" type="mouse_teleop.py" name="mouse_teleop">
<rosparam file="$(find mouse_teleop)/config/mouse_teleop.yaml" command="load"/>
<param name="holonomic" value="$(arg holonomic)"/>
<remap from="mouse_vel" to="$(arg mouse_vel)"/>
</node>
<group if="$(arg plot)">
<node pkg="rqt_plot" type="rqt_plot" name="rqt_plot"
args="$(arg mouse_vel)/linear/x $(arg mouse_vel)/linear/y $(arg mouse_vel)/angular/z"/>
</group>
</launch>rosrun mouse_teleop mouse_teleop.py mouse_vel:=turtle1/cmd_vel
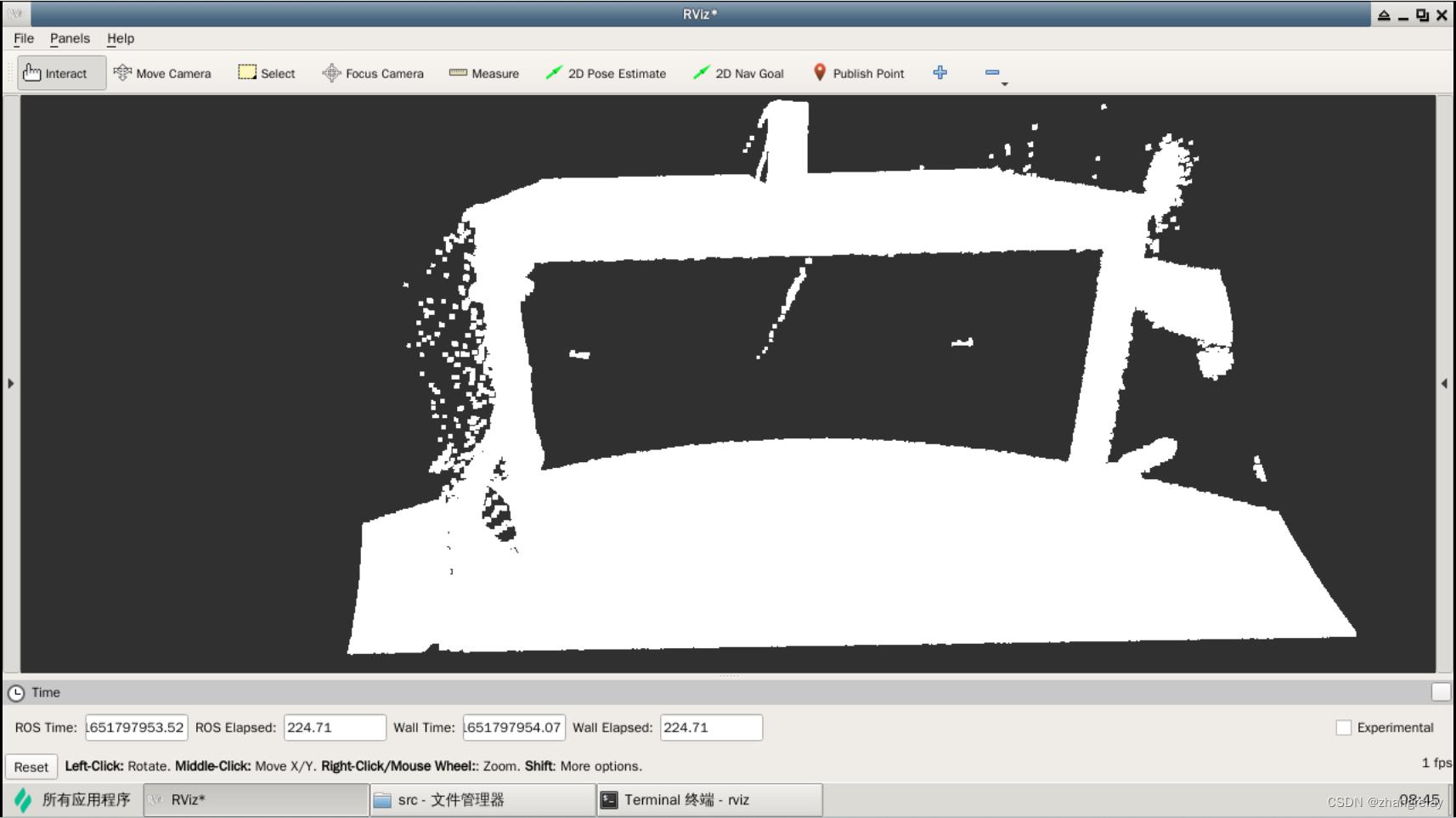
点云:
思考:
1. 掌握功能包复用灵活应用参数。
rosrun rospy_tutorials talker chatter:=/wg/chatter
rosrun rospy_tutorials talker _param:=1.0
2. 点云分割做物体识别
Learning ROS for Robotics Programming Second Edition学习笔记(六) indigo xtion pro live
Learning ROS for Robotics Programming Second Edition学习笔记(七) indigo PCL xtion pro live
以上是关于实验7 蓝桥ROS1使用外设 适用kinetic/melodic/noetic的主要内容,如果未能解决你的问题,请参考以下文章