实验三 蓝桥ROS1可视化和调试工具 适用kinetic/melodic/noetic
Posted zhangrelay
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了实验三 蓝桥ROS1可视化和调试工具 适用kinetic/melodic/noetic相关的知识,希望对你有一定的参考价值。
需要先完成实验1+2,不要直接看本实验。
要求:
调试ROS1节点、日志消息、检测系统状态、设置动态参数、roswtf、可视化节点诊断、绘制标量数据图、图像可视化、3D可视化、保存与回放数据、插件。
环境:
www.lanqiao.cn/courses/854
记录:
这部分内容较多,依据具体情况,这里选用绘制标量图为例:
绘制标量图
从数据到图表
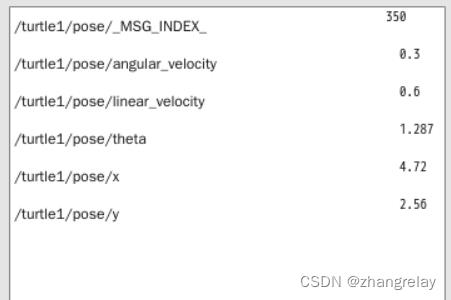
使用rqt工具
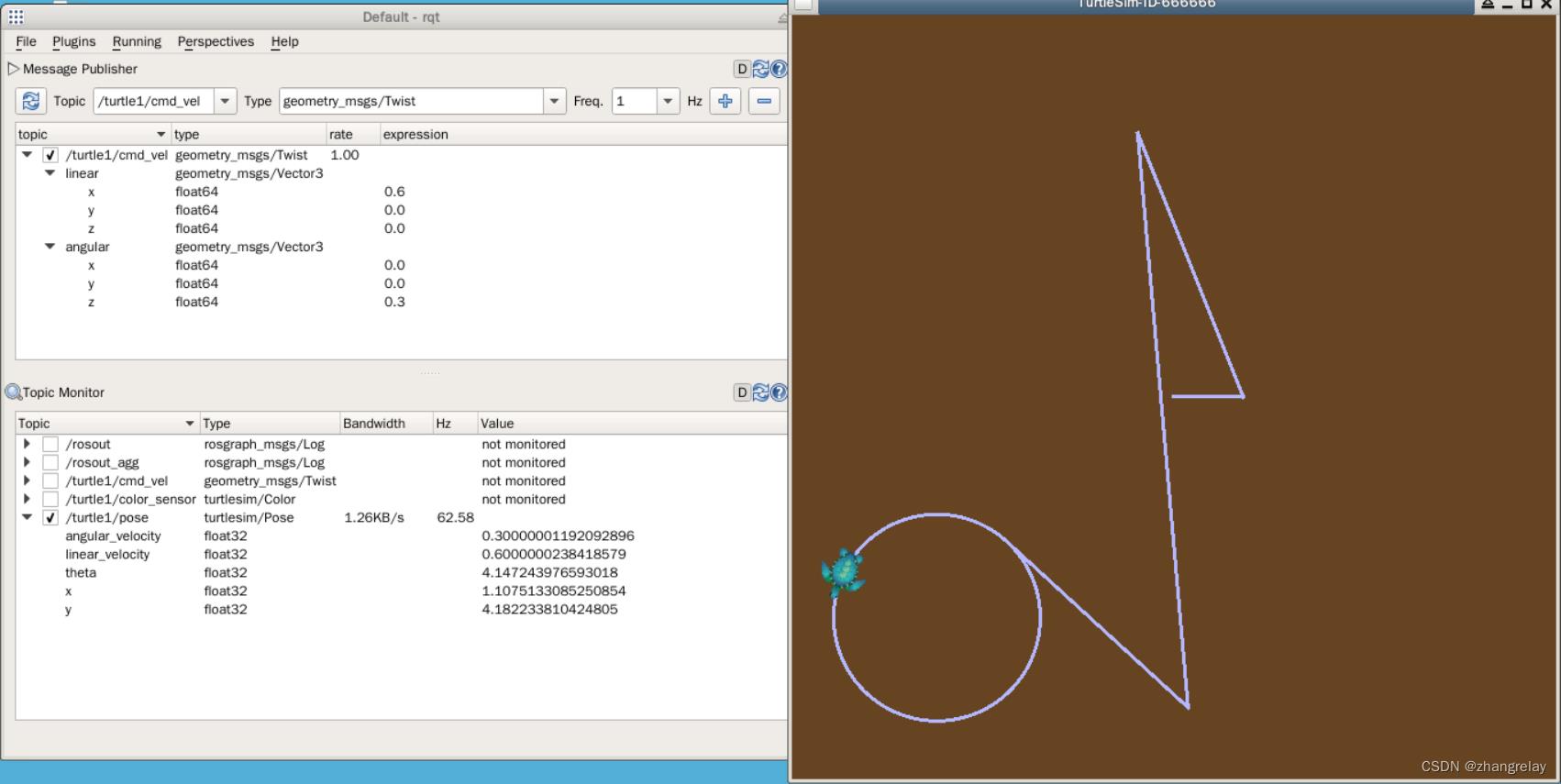
具体数据如果用终端显示如下:
rostopic echo /turtle1/pose
---
x: 0.799173235893
y: 3.09818553925
theta: 4.71850299835
linear_velocity: 0.600000023842
angular_velocity: 0.300000011921
---
x: 0.799278020859
y: 3.088586092
theta: 4.72330284119
linear_velocity: 0.600000023842
angular_velocity: 0.300000011921
---
x: 0.79942882061
y: 3.07898736
theta: 4.72810268402
linear_velocity: 0.600000023842
angular_velocity: 0.300000011921
---
x: 0.799625754356
y: 3.06938934326
theta: 4.73290300369
linear_velocity: 0.600000023842
angular_velocity: 0.300000011921
---
x: 0.799868762493
y: 3.05979251862
theta: 4.73770284653
linear_velocity: 0.600000023842
angular_velocity: 0.300000011921
---
x: 0.800157785416
y: 3.05019688606
theta: 4.74250268936
linear_velocity: 0.600000023842
angular_velocity: 0.300000011921
---
x: 0.800492882729
y: 3.04060268402
theta: 4.74730300903
linear_velocity: 0.600000023842
angular_velocity: 0.300000011921
这种数据非常不形象,使用工具可以使二维,三维数据可视化,便于理解和分析。
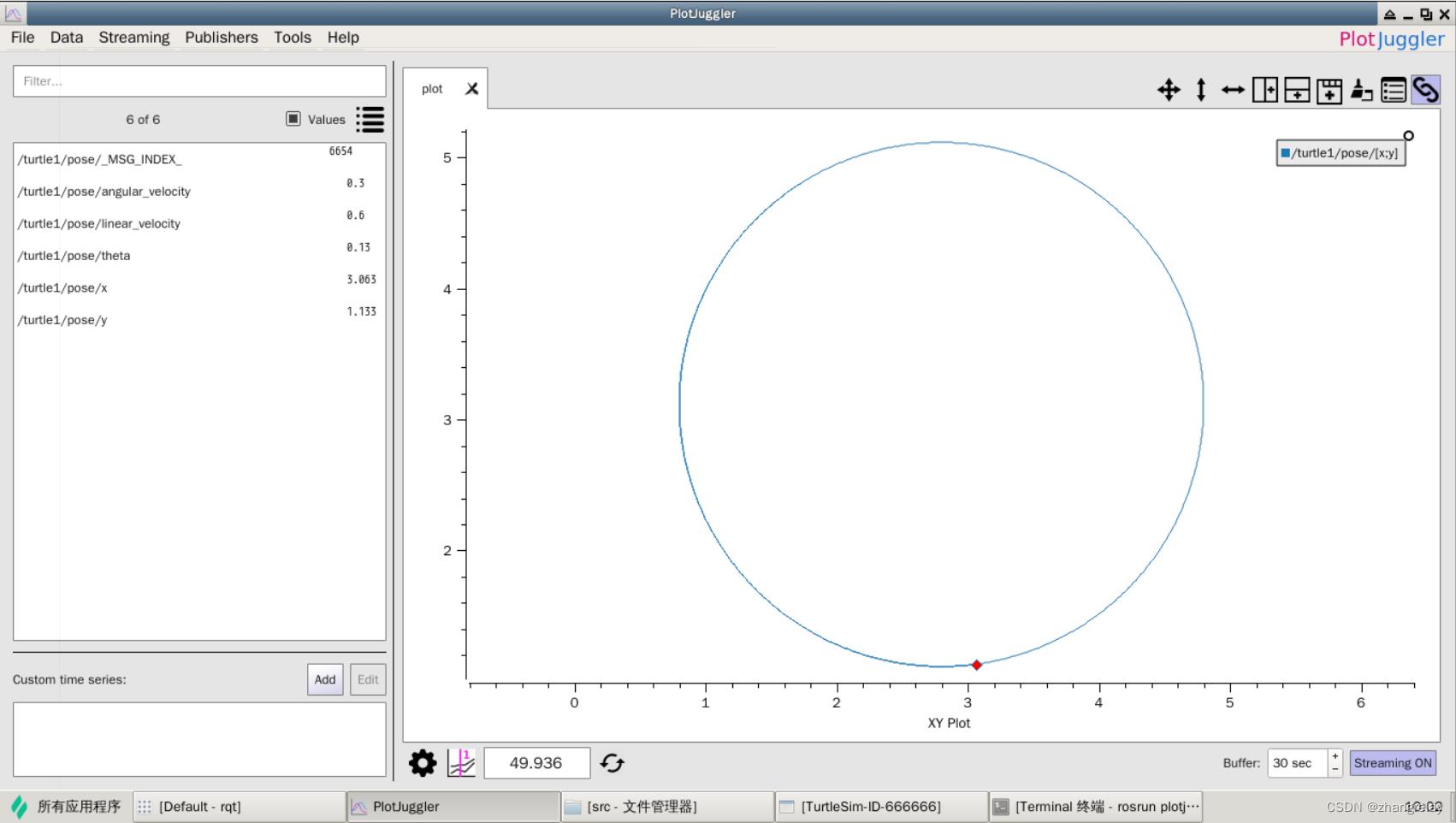
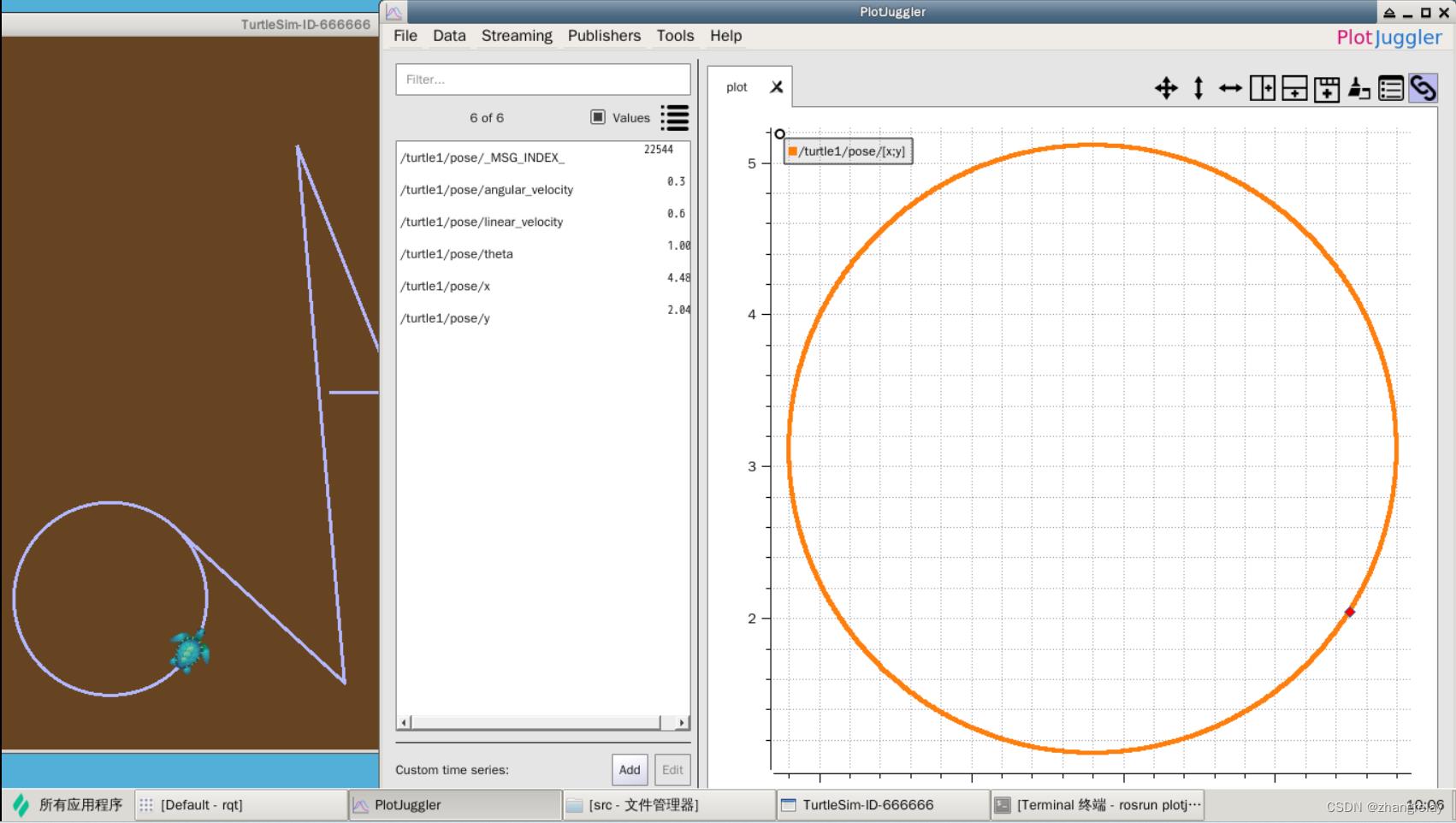
rosrun plotjuggler PlotJuggler
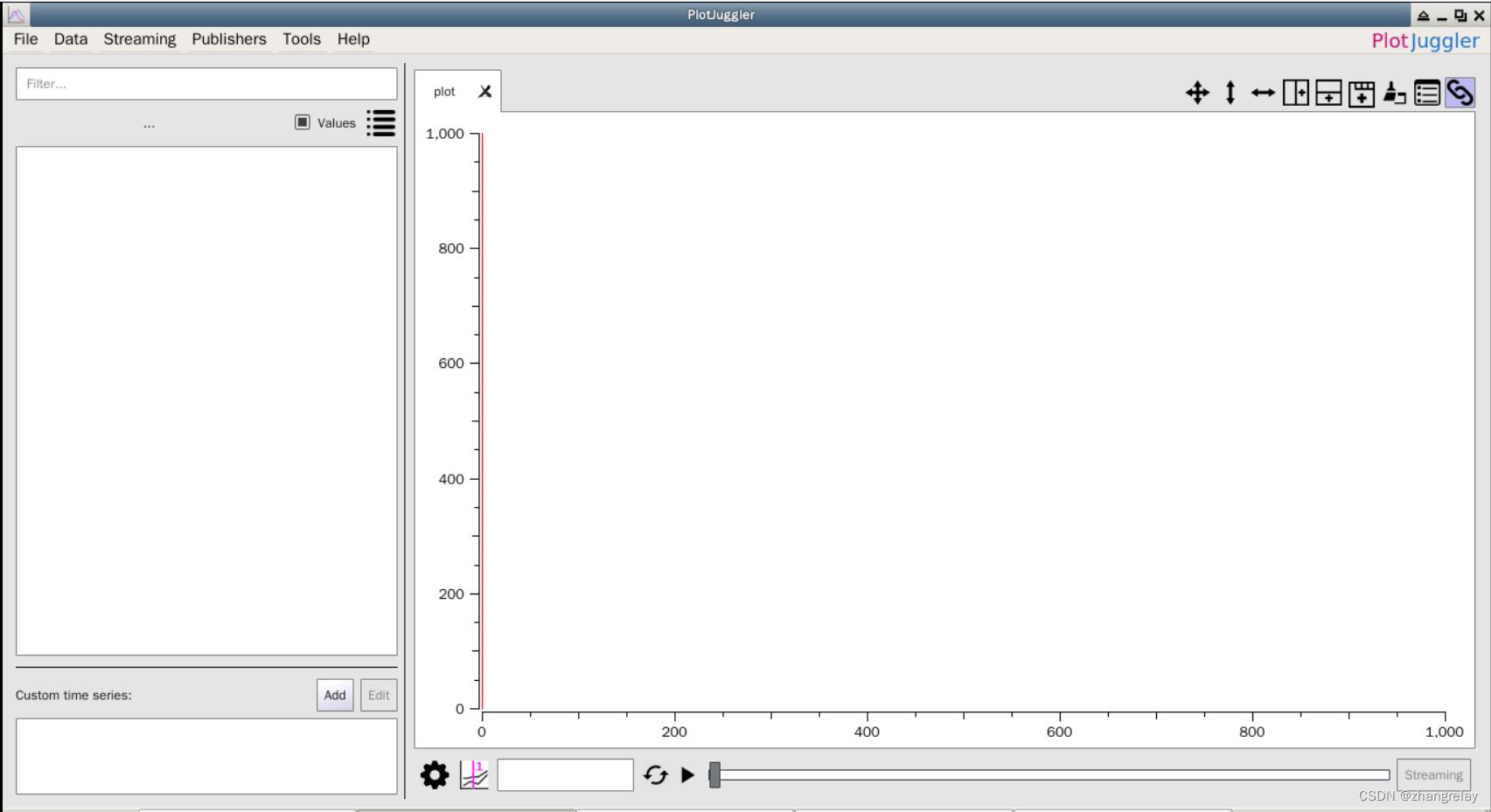
选择steaming
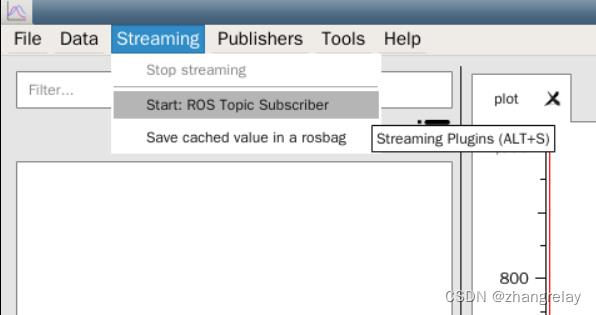
再选择:
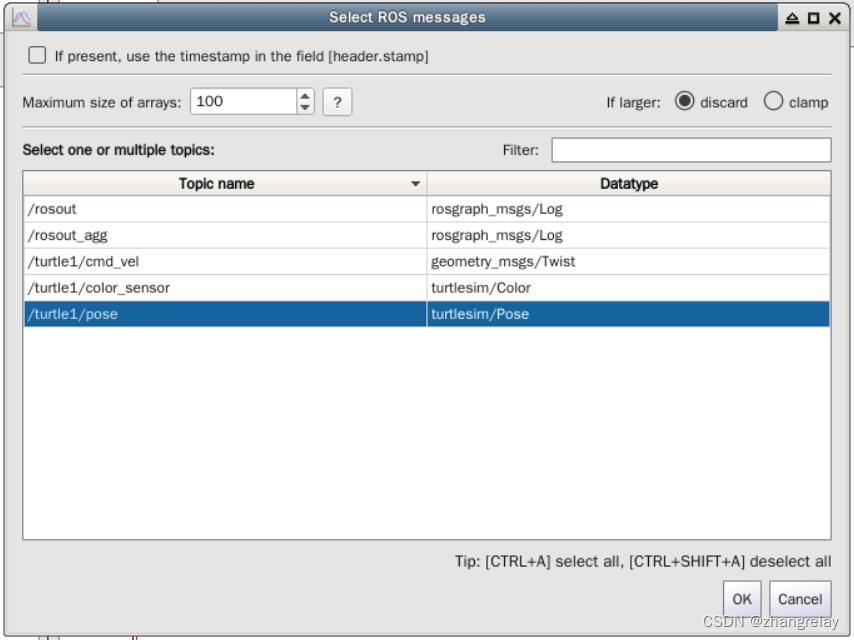
确认ok!
可以看到变化的数值!
绘制为二维曲线图!

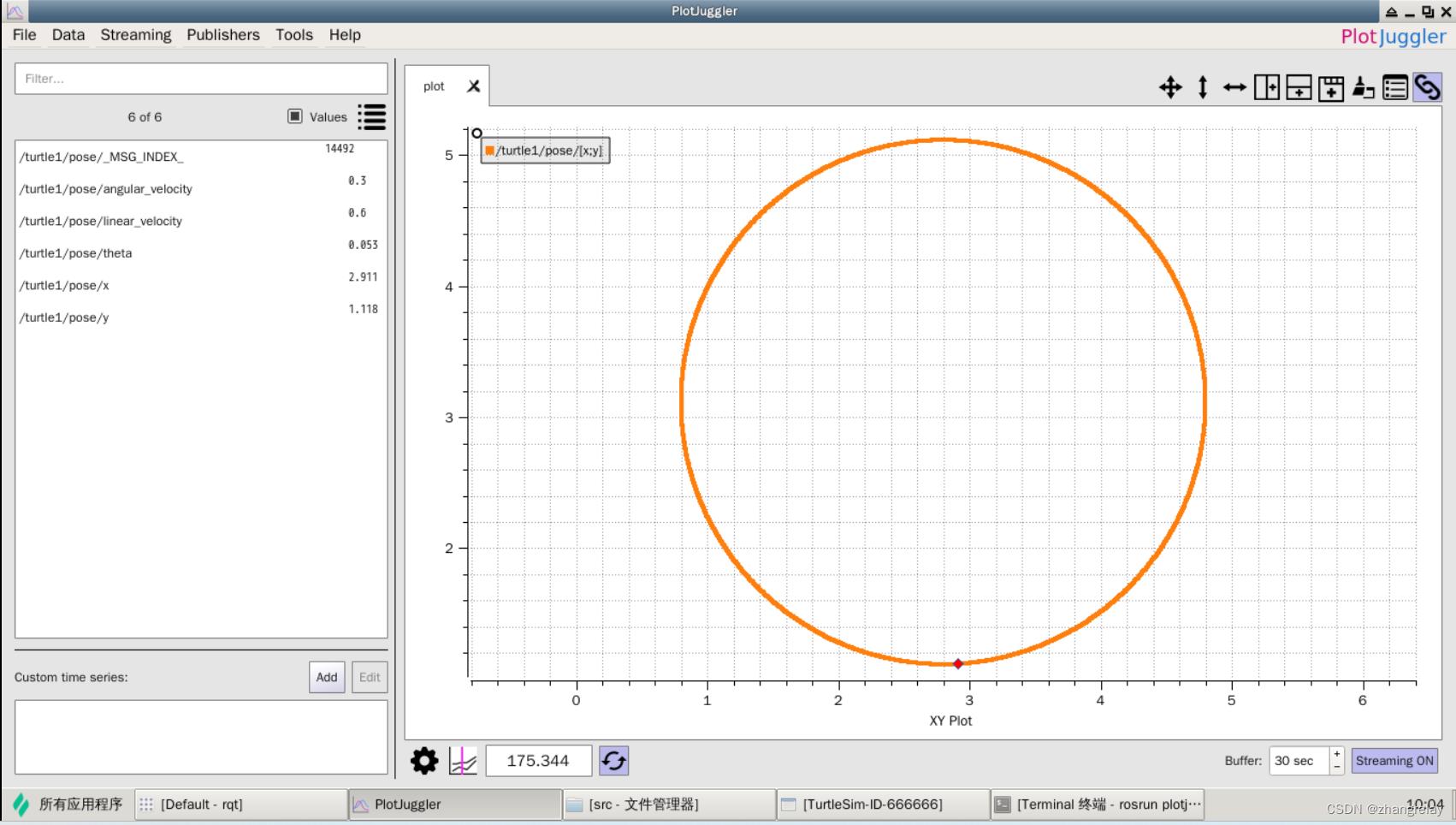
设置buffer 30s:
上图就是可以用于写论文的轨迹曲线,专业级别的。
思考:
1. 遇到下载新功能包速度缓慢

要么等,要么更换为国内服务器
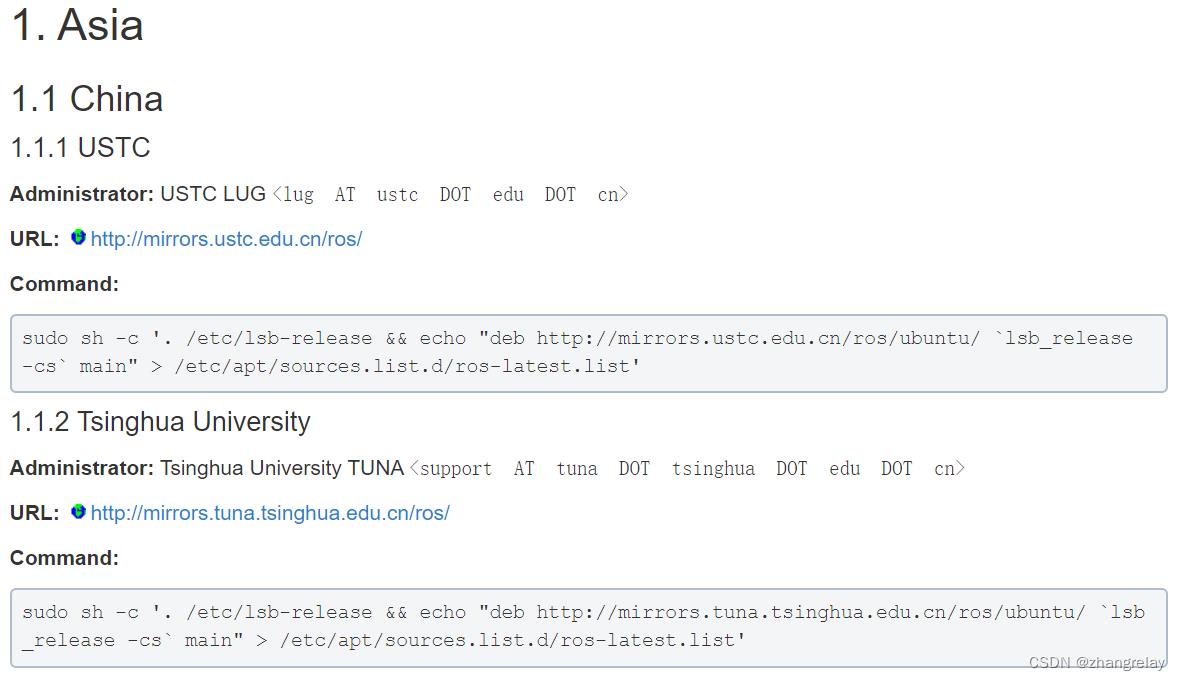 sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
2. ROS工具非常多
需要依据具体情况选择合适工具学习并掌握
以上是关于实验三 蓝桥ROS1可视化和调试工具 适用kinetic/melodic/noetic的主要内容,如果未能解决你的问题,请参考以下文章