电动汽车单轮驱动防滑控制系统ASR
Posted studyer_domi
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了电动汽车单轮驱动防滑控制系统ASR相关的知识,希望对你有一定的参考价值。
1、内容简介
260
2、内容说明
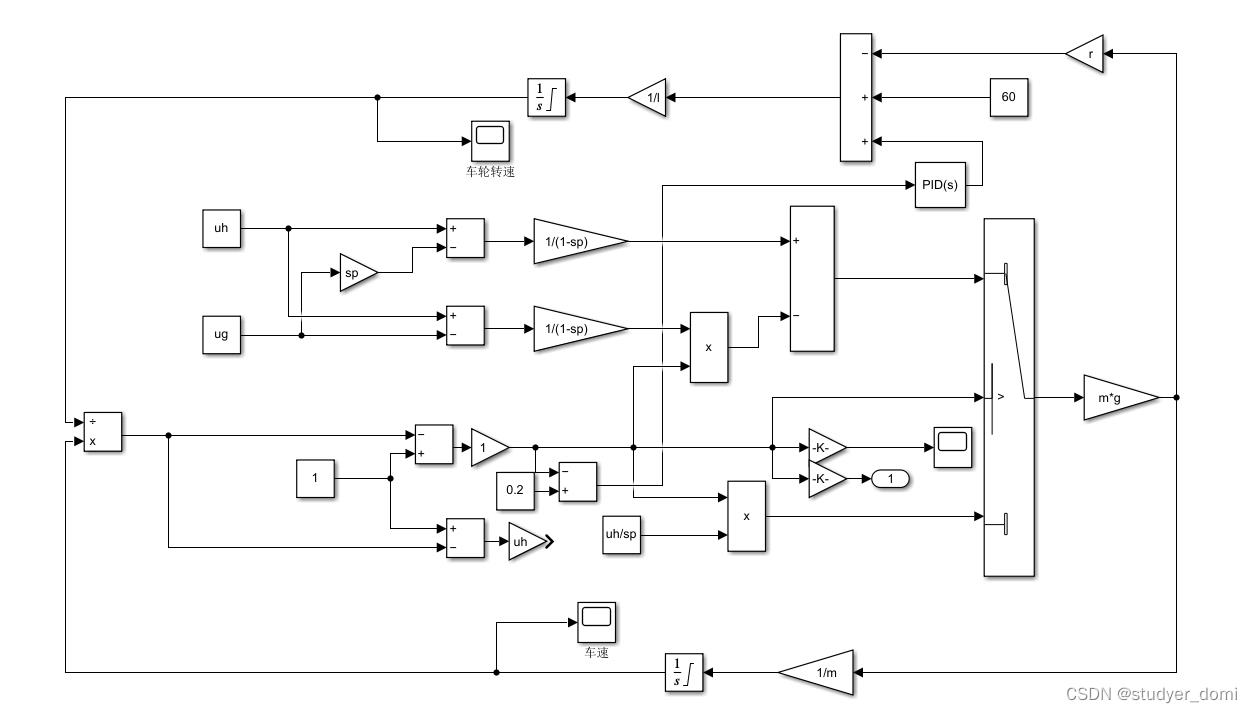
电动汽车驱动防滑控制系统,能够合理控制驱动车轮的驱动力矩,进而防止驱动轮发生过度滑转,提高电动汽车的动力性及横向稳定性,是电动汽车主动安全研究的重点之一。所以,对电动汽车进行 ASR 研究,以提高电动汽车的安全性具有实际意义。本文研究电动汽车 ASR 控制的建模、控制以及分析,主要有以下几个方面: 本文首先对电动汽车 ASR 系统的基本原理给予详细阐述,并介绍了其基本组成及布置,分析了不同阶段的控制原则,阐述了适用于电动汽车 ASR 的控制途径。 其次,建立简单的单轮模型,在此基础上建立了四轮车辆模型,对电动汽车的部分运动变量进行了计算,建立了五自由度的车辆数学模型,包括:车身的纵向运动、横向运动和横摆运动,以及两个驱动轮的回转运动;同时考虑了适用于汽车的纵滑和侧偏的非线性 Dugoff 轮胎数学模型;通过对目前电动汽车用电机的性能对比,选择了合适的永磁无刷直流电机,并建立其简化的数学模型。设计了符合本文研究内容的 PID 控制器及二维模糊控制器,并在 Matlab/simulink 软件中完成了上述各个模块及其子模块仿真模型的搭建。 利用 Matlab/simulink 软件,对车身模型、轮胎模型、电机模型以及 PID 控制器及模糊控制器模型进行连接、封装,完成了电动汽车 ASR 系统的整车仿真模型的搭建,并分别在均一高、低附着系数路面上对电动汽车 ASR 系统进行仿真研究,得出在低附着系数路面上,ASR 控制效果明显,且模糊控制优于 PID 控制。最后对全文进行了总结。
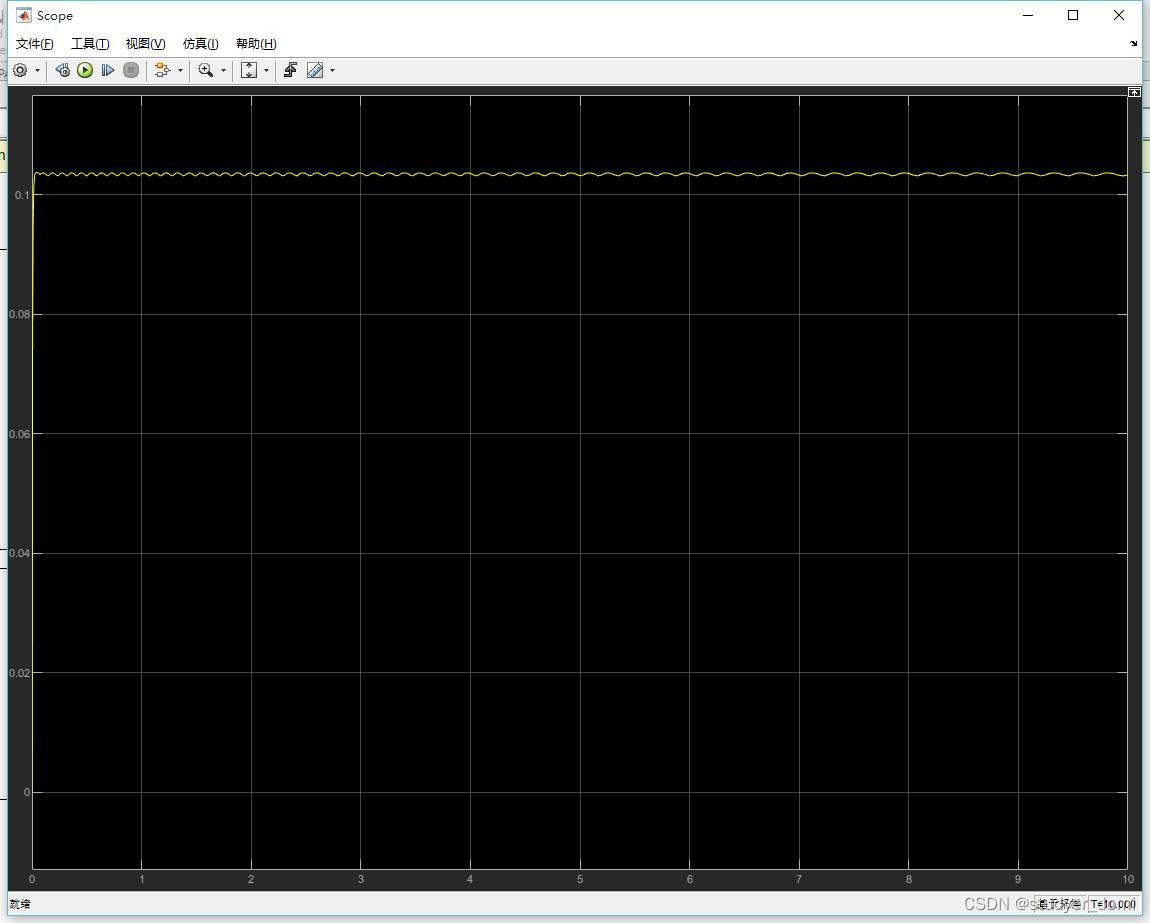
3、仿真分析
4、参考论文
汽车驱动防滑控制系统的仿真研究_邹海斌.caj
汽车驱动防滑控制系统的控制规律研究_熊小根.caj
电动汽车驱动防滑控制算法的研究与仿真分析_晏存欢.caj
电动汽车驱动防滑控制系统的研究_刘洋.caj
电动车驱动防滑控制策略的研究_金胡辛.caj
电动轮汽车驱动防滑控制策略的研究_占泽晟.caj
 创作打卡挑战赛
创作打卡挑战赛
 赢取流量/现金/CSDN周边激励大奖
赢取流量/现金/CSDN周边激励大奖
以上是关于电动汽车单轮驱动防滑控制系统ASR的主要内容,如果未能解决你的问题,请参考以下文章