ARGO数据集—自动驾驶场景(版本:Argoverse 1.1)
Posted 一颗小树x
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ARGO数据集—自动驾驶场景(版本:Argoverse 1.1)相关的知识,希望对你有一定的参考价值。
前言
ARGO是一个自动驾驶场景的数据集,它有竞赛排行(立体深度估计、运动预测、3D检测、3D跟踪等等),截止2021.12最新版本是Argoverse 1.1;Argoverse1.1 通过1000 多个驾驶小时中提取,包括 113 个场景的 3D 跟踪注释,和用于运动预测的 324,557 条车辆轨迹。
官网地址:https://www.argoverse.org/data.html
一、Argoverse 1.1简介
Argoverse 1.1通过1000 多个驾驶小时中提取,包括 113 个场景的 3D 跟踪注释,和用于运动预测的 324,557 条车辆轨迹。它还两张带有车道中心线、交通方向、地面高度等的高清 (HD) 地图。支持将地图数据与传感器信息连接起来的 API。
使用一组完全与 Argo AI 自动驾驶技术集成的相同福特 Fusion 混合动力车收集了所有数据。包括来自两个 LiDAR 传感器、七个环形摄像头和两个前置立体摄像头的数据。所有传感器都安装在车顶上:

1.1 激光雷达 2 个安装在车顶的 LiDAR 传感器;重叠 40° 垂直视野;范围 200m;LiDAR 传感器平均会在 10 Hz 下产生约 107,000 个点的点云;
1.2 相机 七个高分辨率环形摄像机 (1920 x 1200),具有 360° 的综合视野, 以 30 Hz 的频率进行记录;两个前置立体摄像头 (2056 x 2464) 以 5 Hz 采样;
1.3 定位 结合了基于 GPS 和基于传感器的定位方法,为每个时间戳提供了 6-DOF 定位。
1.4 传感器之间校准 每个驾驶会话的传感器测量值都存储在“log日志”中。对于每个日志,提供 LiDAR 和所有九个摄像头的内在和外在校准数据。
二、竞赛
2.1 立体深度估计竞赛(CVPR )
EvalAI: Evaluating state of the art in AI https://eval.ai/web/challenges/challenge-page/917/overview
https://eval.ai/web/challenges/challenge-page/917/overview
2.2 运动预测竞赛(CVPR )
EvalAI: Evaluating state of the art in AIhttps://eval.ai/web/challenges/challenge-page/454/overview
2.3 3D目标检测
EvalAI: Evaluating state of the art in AIhttps://eval.ai/web/challenges/challenge-page/725/overview
2.4 3D跟踪竞赛(CVPR )
EvalAI: Evaluating state of the art in AIhttps://eval.ai/web/challenges/challenge-page/453/overview
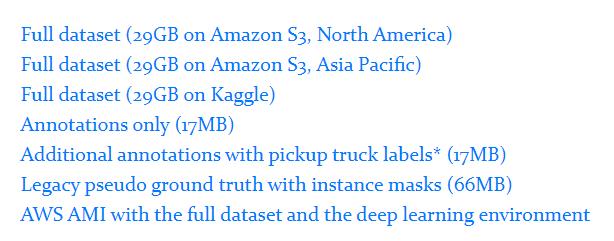
三、下载数据集
地址:https://www.argoverse.org/data.html
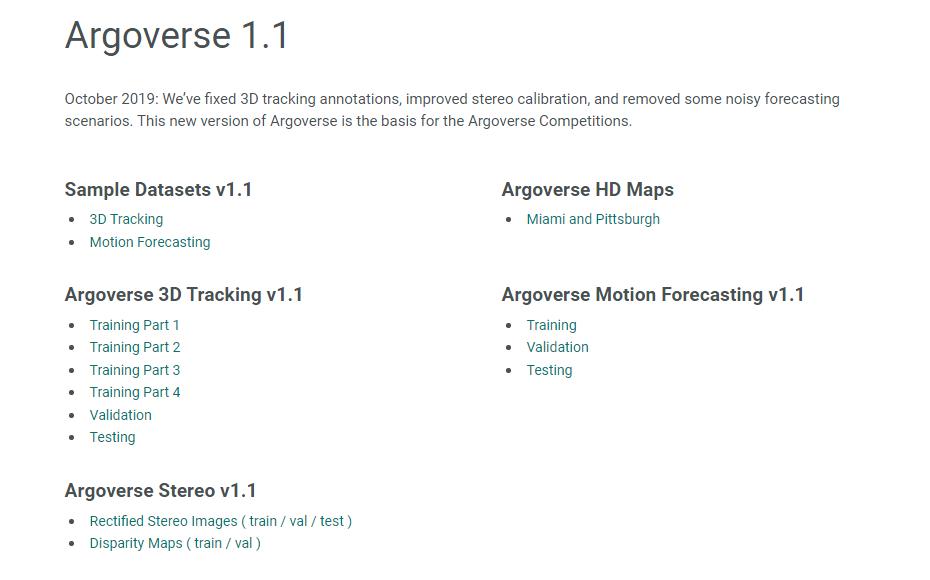
如果做2D目标检测的,只使用“”前面中央位置的相机“”,可以到这里下载,大约30G左右。
Streaming Perceptionhttp://www.cs.cmu.edu/~mengtial/proj/streaming/
本文只供大家参考与学习,谢谢。
以上是关于ARGO数据集—自动驾驶场景(版本:Argoverse 1.1)的主要内容,如果未能解决你的问题,请参考以下文章