cartographer之pose_extrapolator
Posted COCO_PEAK_NOODLE
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了cartographer之pose_extrapolator相关的知识,希望对你有一定的参考价值。
pose_extrapolator实现了订阅imu、odom、scan的匹配结果进行位姿的推断,我们先分析一下它的类,几个重要的外部接口,就是public的方法
// Returns the time of the last added pose or Time::min() if no pose was added
// yet.
common::Time GetLastPoseTime() const override;
common::Time GetLastExtrapolatedTime() const override;
void AddPose(common::Time time, const transform::Rigid3d& pose) override;
void AddImuData(const sensor::ImuData& imu_data) override;
void AddOdometryData(const sensor::OdometryData& odometry_data) override;
transform::Rigid3d ExtrapolatePose(common::Time time) override;
//3D
ExtrapolationResult ExtrapolatePosesWithGravity(
const std::vector<common::Time>& times) override;
// Returns the current gravity alignment estimate as a rotation from
// the tracking frame into a gravity aligned frame.
Eigen::Quaterniond EstimateGravityOrientation(common::Time time) override;
然后是内部私有的方法和变量
void UpdateVelocitiesFromPoses();
void TrimImuData();
void TrimOdometryData();
void AdvanceImuTracker(common::Time time, ImuTracker* imu_tracker) const;
Eigen::Quaterniond ExtrapolateRotation(common::Time time,
ImuTracker* imu_tracker) const;
Eigen::Vector3d ExtrapolateTranslation(common::Time time);
const common::Duration pose_queue_duration_;
struct TimedPose
common::Time time;
transform::Rigid3d pose;
;
std::deque<TimedPose> timed_pose_queue_;
Eigen::Vector3d linear_velocity_from_poses_ = Eigen::Vector3d::Zero();
Eigen::Vector3d angular_velocity_from_poses_ = Eigen::Vector3d::Zero();
const double gravity_time_constant_;
std::deque<sensor::ImuData> imu_data_;
std::unique_ptr<ImuTracker> imu_tracker_;
std::unique_ptr<ImuTracker> odometry_imu_tracker_;
std::unique_ptr<ImuTracker> extrapolation_imu_tracker_;
TimedPose cached_extrapolated_pose_;
std::deque<sensor::OdometryData> odometry_data_;
Eigen::Vector3d linear_velocity_from_odometry_ = Eigen::Vector3d::Zero();
Eigen::Vector3d angular_velocity_from_odometry_ = Eigen::Vector3d::Zero();
这些都是干啥用的?我们一一分解,最后总结
1-AddImuData
这个函数就是把imu_data存入双端队列imu_data_中,TrimImuData()的作用是移除imu_data_内过期不用的imu_data数据,后面再详细介绍。
void PoseExtrapolator::AddImuData(const sensor::ImuData& imu_data)
CHECK(timed_pose_queue_.empty() ||
imu_data.time >= timed_pose_queue_.back().time);
imu_data_.push_back(imu_data);
TrimImuData();
2-AddOdometryData
这个函数就是把odometry_data存入odometry_data_。
TrimOdometryData()的作用是移除odometry_data_内过期不用的odometry_data数据,后面再详细介绍。
下面还做了一件事情,就是使用里程计来估计当前小车或agv的线速度和角速度。
这里出现了变量timed_pose_queue_,还有odometry_imu_tracker_,是不是很晕?我们先不管它,再看下一个函数
void PoseExtrapolator::AddOdometryData(
const sensor::OdometryData& odometry_data)
CHECK(timed_pose_queue_.empty() ||
odometry_data.time >= timed_pose_queue_.back().time);
odometry_data_.push_back(odometry_data);
TrimOdometryData();
if (odometry_data_.size() < 2)
return;
// TODO(whess): Improve by using more than just the last two odometry poses.
// Compute extrapolation in the tracking frame.
const sensor::OdometryData& odometry_data_oldest = odometry_data_.front();
const sensor::OdometryData& odometry_data_newest = odometry_data_.back();
const double odometry_time_delta =
common::ToSeconds(odometry_data_oldest.time - odometry_data_newest.time);
const transform::Rigid3d odometry_pose_delta =
odometry_data_newest.pose.inverse() * odometry_data_oldest.pose;
//
angular_velocity_from_odometry_ =
transform::RotationQuaternionToAngleAxisVector(
odometry_pose_delta.rotation()) /
odometry_time_delta;
if (timed_pose_queue_.empty())
return;
const Eigen::Vector3d
linear_velocity_in_tracking_frame_at_newest_odometry_time =
odometry_pose_delta.translation() / odometry_time_delta;
const Eigen::Quaterniond orientation_at_newest_odometry_time =
timed_pose_queue_.back().pose.rotation() *
ExtrapolateRotation(odometry_data_newest.time,
odometry_imu_tracker_.get());
linear_velocity_from_odometry_ =
orientation_at_newest_odometry_time *
linear_velocity_in_tracking_frame_at_newest_odometry_time;
3-AddPose
addPose存入的是前端一帧一帧激光匹配的位姿(这里加句写给能看懂的同行,就是两个node之间的位姿,看不懂也不影响),这里把pose存入双端对列timed_pose_queue_。
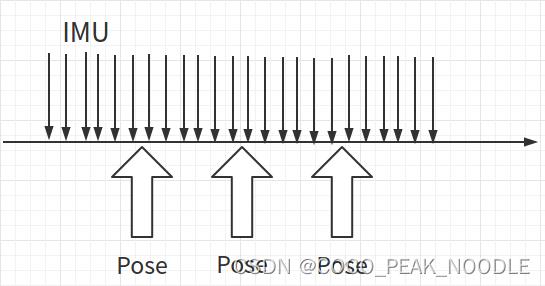
看到这里我们知道PoseExtrapolator里已经传入了3种数据,分别是IMU、odom、pose,由于pose是由激光匹配产生的,而激光的频率是比IMU和odom要低的,所以这里pose的传入频率比IMU、odom低,比如传入5帧IMU,才插入一个pose。画个图解释一下
 这里->
这里->
IMU数据存入imu_data_
ODOM数据存入odometry_data_
pose数据存入timed_pose_queue_
timed_pose_queue_会根据保留时间间隔pose_queue_duration_来移除超时的pose,同时,
我们在上面看到的TrimImuData和TrimOdometryData的作用也是移除时间不在timed_pose_queue_范围的数据,准确的说是移除时间小于timed_pose_queue_,front()的数据
我们回到AddPose,它接下来根据pose来估算小车的线速度和角速度,刚才我们看到使用里程计数据也可以估算小车的线速度和角速度,他们之间有什么关系呢?后面再分析
接下来是AdvanceImuTracker,估计又该晕一大片了,这里要详细分析imu_tracker的代码,我先来告诉大家,它的作用就是用一帧一帧IMU来推断当前时刻的机器人位姿,所以叫imu_tracker(imu的跟踪器),就这么简单
接下来TrimImuData和TrimOdometryData的作用已经解释了
最后这2个变量是干啥?
odometry_imu_tracker_ = absl::make_unique<ImuTracker>(*imu_tracker_);
extrapolation_imu_tracker_ = absl::make_unique<ImuTracker>(*imu_tracker_);
相信很多人都没有弄明白,因为弄明白不是只看一行代码可以理解的,这里我说一下我的理解(应该是对的),我们知道AdvanceImuTracker的作用是使用imu更新当前的状态,但是有些时候我需要保留上一位姿pose的imu_tracker的状态,所以产生了这两个变量,每次调用AddPose,imu_tracker都会同时更新odometry_imu_tracker_和extrapolation_imu_tracker_。
我们再来看看这2个分别起的作用:
odometry_imu_tracker_在AddOdometryData用于辅助计算线速度,extrapolation_imu_tracker_在ExtrapolatePose用于前端辅助实现激光运动畸变矫正。
void PoseExtrapolator::AddPose(const common::Time time,const transform::Rigid3d& pose)
if (imu_tracker_ == nullptr)
common::Time tracker_start = time;
if (!imu_data_.empty())
tracker_start = std::min(tracker_start, imu_data_.front().time);
imu_tracker_ =
absl::make_unique<ImuTracker>(gravity_time_constant_, tracker_start);
timed_pose_queue_.push_back(TimedPosetime, pose);
// double delta = common::ToSeconds(time - last_time);
// LOG(INFO) << "AddPose delta " << delta;
while (timed_pose_queue_.size() > 2 &&
timed_pose_queue_[1].time <= time - pose_queue_duration_)
timed_pose_queue_.pop_front();
UpdateVelocitiesFromPoses();
AdvanceImuTracker(time, imu_tracker_.get());
TrimImuData();
//LOG(INFO) << "okagv AddPose start TrimOdometryData";
TrimOdometryData();
//okagv update the odometry_imu_tracker and extrapolation_imu_tracker_
odometry_imu_tracker_ = absl::make_unique<ImuTracker>(*imu_tracker_);
extrapolation_imu_tracker_ = absl::make_unique<ImuTracker>(*imu_tracker_);
//LOG(INFO) << "timed_pose_queue_ size " << timed_pose_queue_.size();
//last_time = time;
说到这基本上差不多结束了,但是细节还不止如此,再有领悟再来更新
以上是关于cartographer之pose_extrapolator的主要内容,如果未能解决你的问题,请参考以下文章