群体智能协同作业与认知计算技术研究
Posted 卓晴
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了群体智能协同作业与认知计算技术研究相关的知识,希望对你有一定的参考价值。
大家好,我是课题三负责人,卓晴。 代表课题三,群体智能协同作业与认知计算技术研究的参与人员向各位专家 汇报课题三的相关内容。 课题三主要参与单位包括:清华大学, 黑龙江德沃科技开发有限公司。

下面将分以下五个部分汇报课题内容。

首先介绍项目的背景与课题主要研究内容。

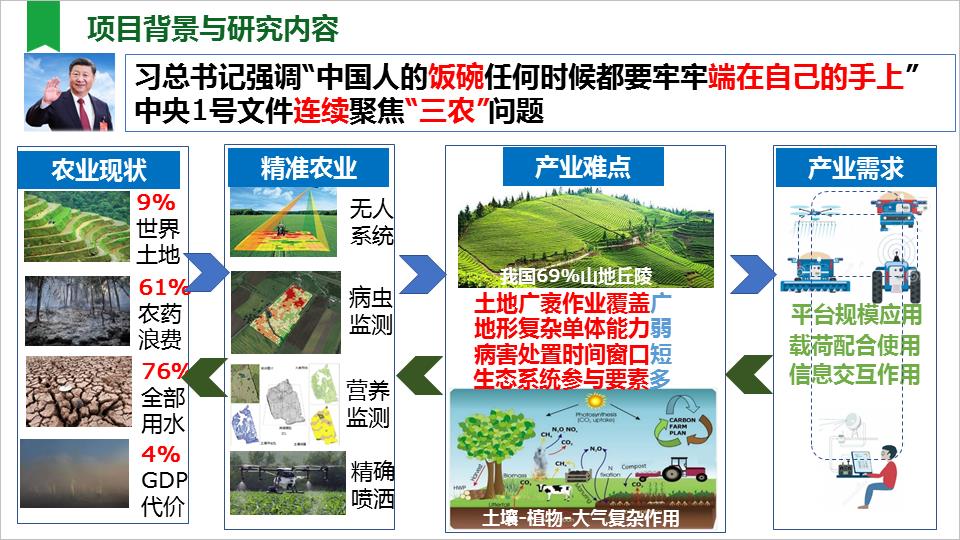
项目《群体智能自主作业智慧农场》基于我国农业现状,实施精准农业战略。 瞄准现代农业产业诸多难点, 应用新一代人工智能技术, 满足农业产业升级换代的需求。
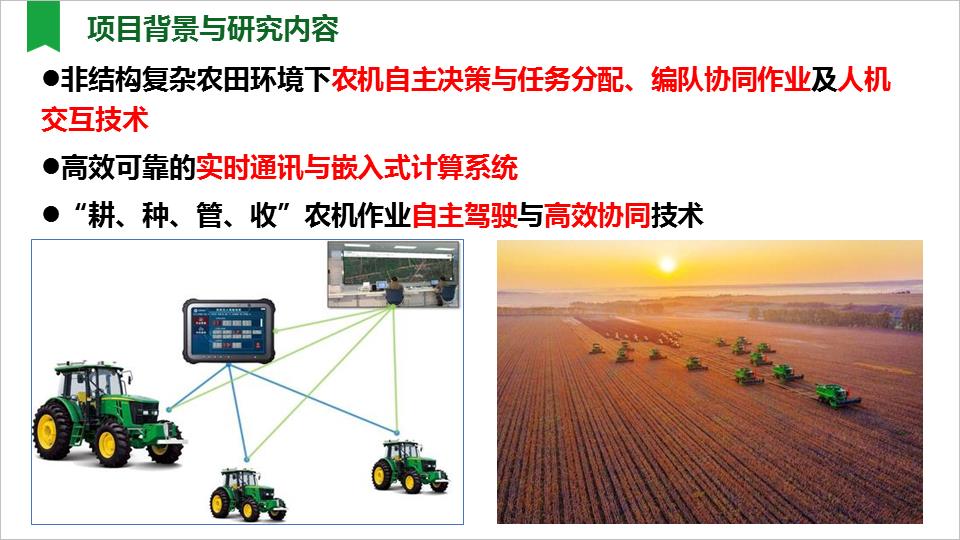
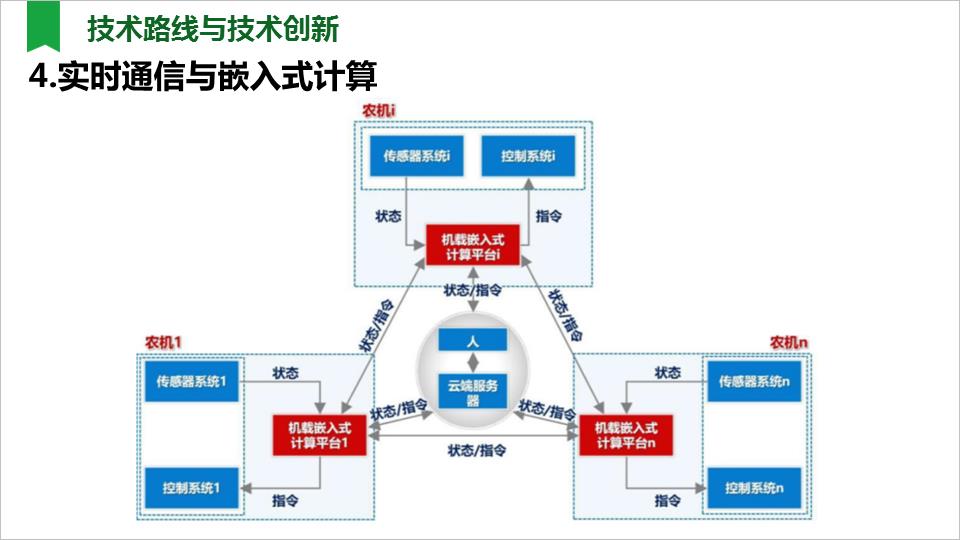
课题三的群体智能协同作业与认知计算研究内容包括三方面的技术: 1)基于农业作业的特点,即非结构复杂农田环境下, 农机自主决策与任务分配、人机交融技术; 2)高效可靠的现场无线实时通信以及嵌入式边云结合的计算平台技术; 3)耕种管收多环节中多种、 多套农机自主驾驶与编队高效协同作业技术;
结合智慧农场具体生产作物品种:小麦、玉米和水稻生产中提出的实际求解: (1)在群体智能的自主决策与任务分配;基于强化学习的编队运动控制; (2)基于意图识别的人机协同等方面完成技术突破; 研制满足项目演示与验证的嵌入式计算平台, 实现现场实时无线组网与智能决策规划算法; (3)最终实现耕种管收各环节农机群体高效协同作业与弄成生产全流程智能化;
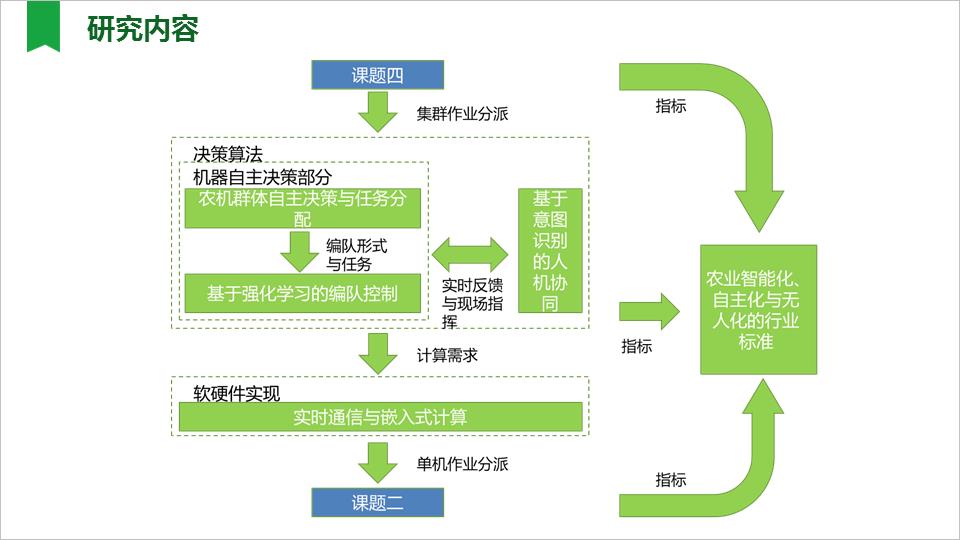
本土显示了课题三与其它课题关系, 以及内部主要研究内容结构。 课题四向课题三分配集群作业任务; 课题三在自研的实时通信与边端计算平台上, 完成内部自主决策算法, 实现场地编队控制, 通过人机协同界面实现人机之间实时反馈。 具体即时指令发送到课题二中作业农机接口。 配合整体完成农业智能化、 自主化与无人化作业行业标准编制。
(2)主要的技术路线与技术创新。

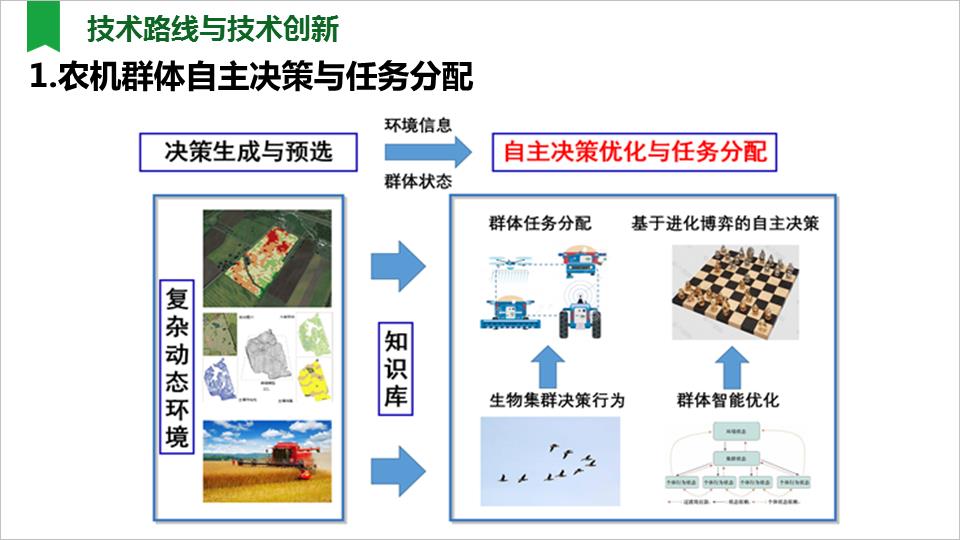
在农机群体自主决策与任务分配方面, 针对农田作业的复杂动态环境, 利用项目其它课题建立的知识库, 设计开发自主决策与任务分配算法。 主要利用基于进化博弈算法、 仿生集群决策算法以及群体智能优化算法实现群体任务分配与调度。
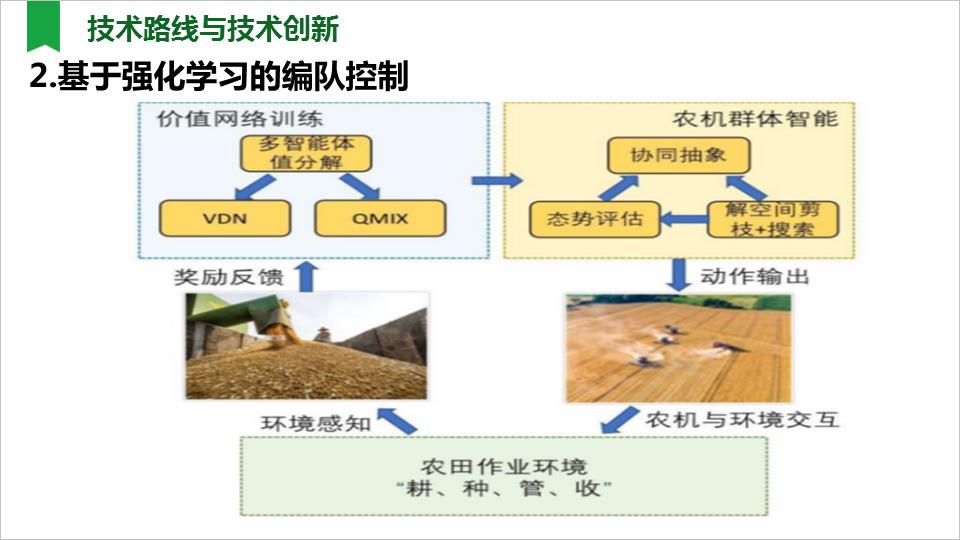
在农机群体编队 与协同作业方面。 一方面不同农机行进特性差异性很大, 另一方面农田场地具有一定的非确定性和非结构化的特点。 利用强化学习方式, 实现编队控制参数与策略的优化, 并进行实时控制。
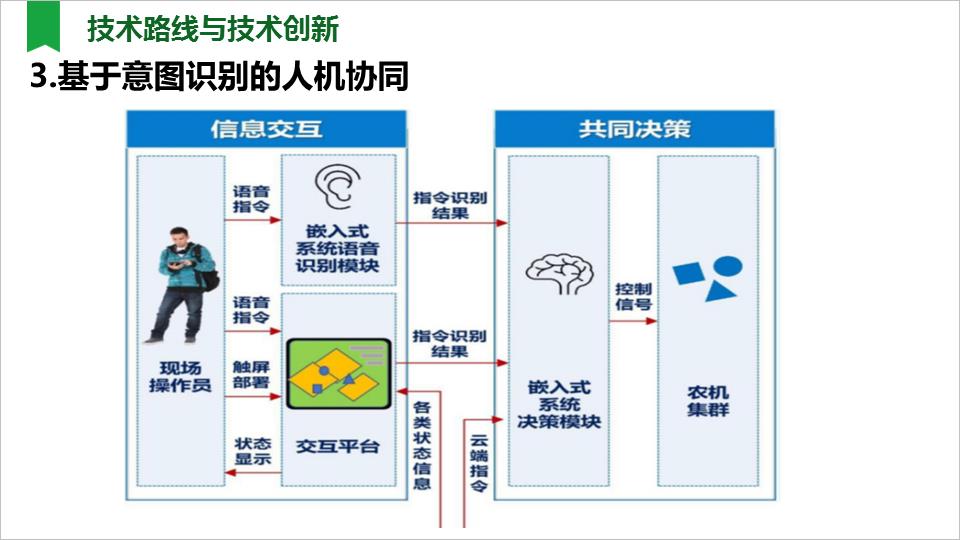
人机交互是完成农机群体智能现场运行的各个阶段, 可知、可控、可解析的重要保证。 确定无人系统安全可靠的边界条件 。一方面作业监控人员可以通过手持或佩戴的电子设备了解农机作业状态; 另一方面利用声音、图像、手势识别技术完成意图识别的人机协同。
针对现场农具作业任务与环境, 研制能够进行现场无线组网、 实现嵌入式计算的硬件平台。 完成自主规划任务计算, 并对实时控制指令下发给农机下位机控制单元, 并完成作业信息与运行状态的搜集。
项目的主要创新点包括两方面: 1)提出基于大数据与知识图谱双驱动, 结合仿生与强化训练等人工智能手段, 实现异构农机具和群体智能体协同作业规划方法; 2) 提出并实现 包括有人机融合协同、 现场大范围实时通信与嵌入式计算的农机动态编队、 协同工作模式;

(3)研究团队与工作基础

课题三的牵头单位, 清华大学依托于清华大学自动化系导航与控制研究所。 它主要以智能无人系统核心技术为牵引, 在无人机、无人车、空间机器人、水下无人系统等方面承担和完成了多项国家、科技部、自然基金等方面的科研项目; 参与单位黑龙江的沃科技开发有限公司, 是国内专业打造高端农机装白和农业服务的国家级高新技术企业。 拥有多项专利技术,获得过多项科技奖项。
这里给出了参与单位部分现场科研项目, 以及相关研制的农机具。

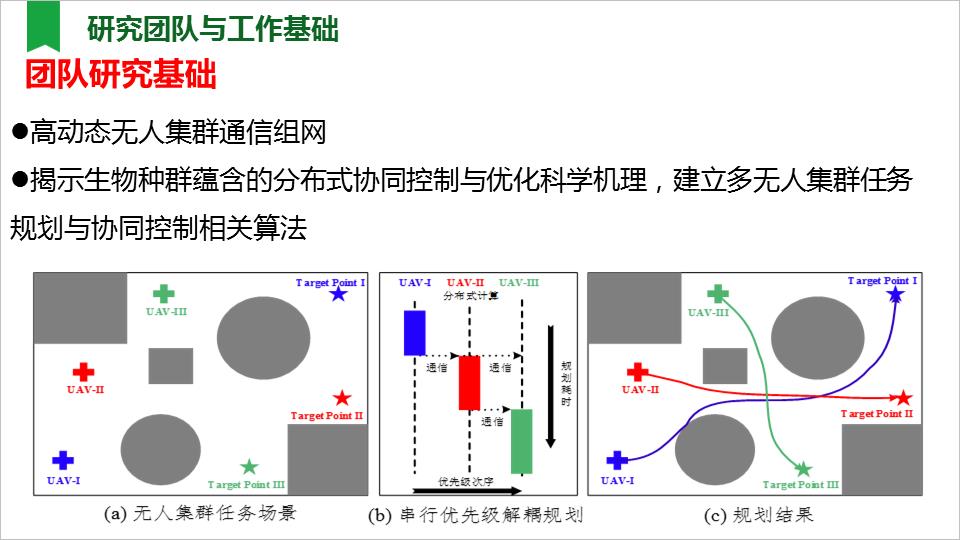
在以往技术积累方面, 实现了高动态无人机群通讯组网系统, 可以满足群体农机现场通讯要求; 提出并验证了生物种群中分布式协同控制 与优化机理, 并实现了多种无人及其任务规划 与协同控制相关算法。
在任务申请、启动过程中, 与项目其它课题共同开展了水田、 旱田农机标准化作业刘生调研一是梳理; 确定了整体项目示范展示的农机群体自主作业方案;

现场考察了课题成果应用示范基地: 290农场现场网络、电力以及农田设施情况。

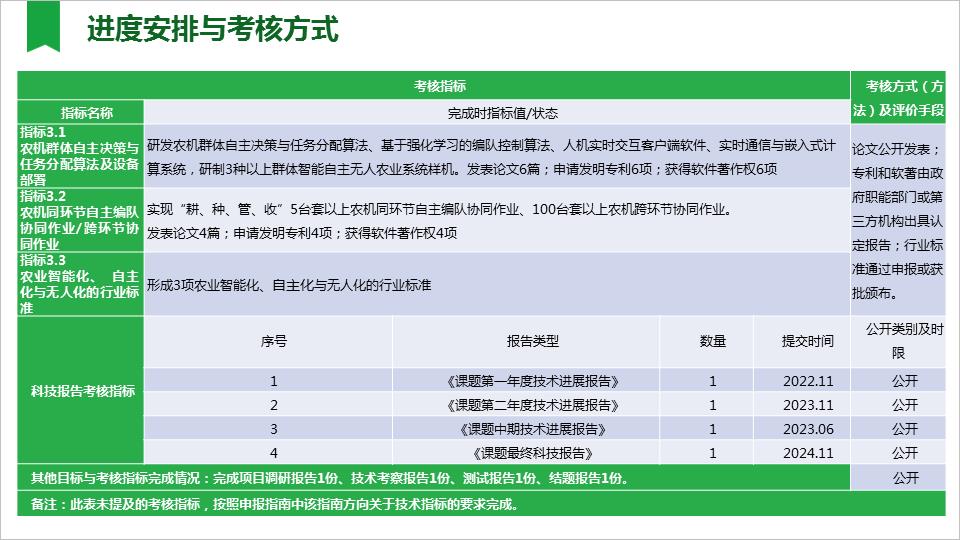
(4)课题进度安排与考核方式

这张表格给出了三年, 按季度划分的进度安排。 课题三按照三条主线并行进行; 第一条是关于农机协同作业算法的仿真 与验证平台设计; 第二条是实现群体智能控制的计算硬件平台验证设计与定型; 第三条是对研制过程中相关技术总结生成的报告、论文、专利、行业规范以及人才培养等。 最终配合项目整体完成系统集成与应用示范。
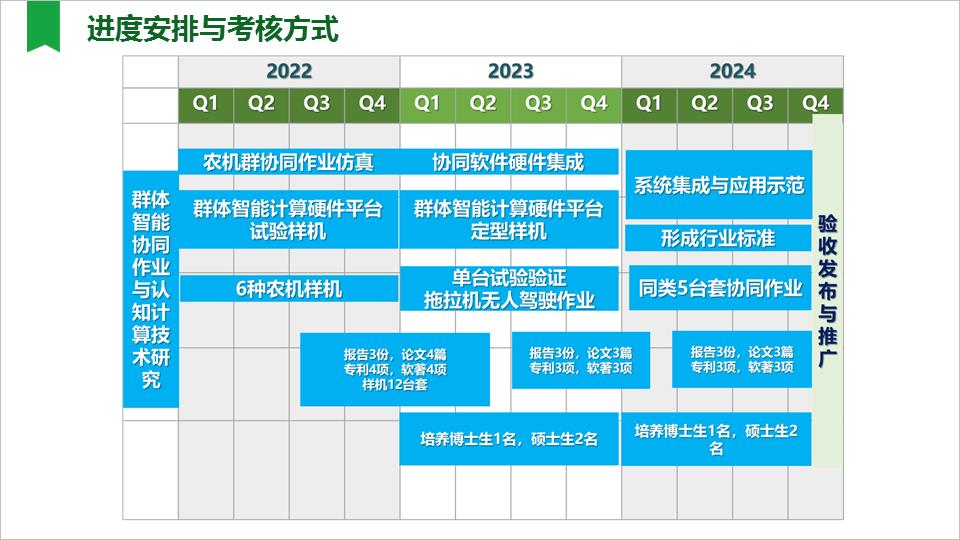
关于项目的考核方式各部分的内容都集中在这张表格中。
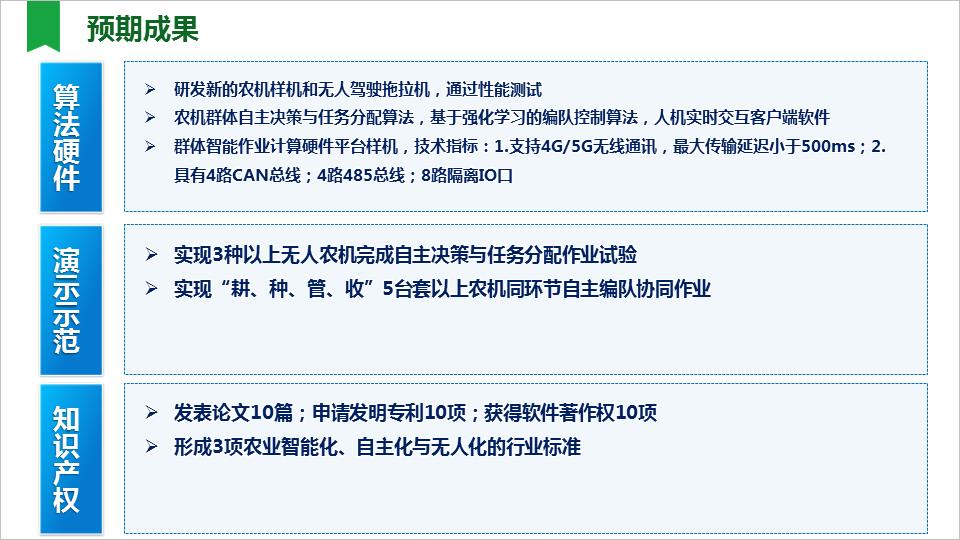
(5)项目预算与预期成果

这张表格给出了项目的经费总额与预算分配方案。

预期成果包括三个方面: 第一方面是群体智能的算法软件与硬件平台; 第二部分是实现系统集成与示范演示, 包括三种以上无人农机的自主决策 与任务分配; 实现5台套以上弄感触同环节自主编队协同作业; 第三部分是相关论文、专利、软著内容。 最终形成三项农业智能化、自主化与无人化的行业标准。
以上是我的汇报内容, 敬请各位专家批评指正。

以上是关于群体智能协同作业与认知计算技术研究的主要内容,如果未能解决你的问题,请参考以下文章