Linux驱动开发-编写超声波测距模块的驱动
Posted DS小龙哥
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了Linux驱动开发-编写超声波测距模块的驱动相关的知识,希望对你有一定的参考价值。
1. 介绍
当前采用的这种超声波测距模块在各大高校实验室、毕设、课设里用的很多,原理很简单,通过声波测距,发出的声音碰到障碍物会反弹,声音在空气里传播的速度是已知的,根据时间就能计算出测量的距离。这款超声波模块内部自带了时间计算电路,型号是HC-SR04 ,它可提供 2cm-400cm 的非接触式距离感测功能,距精度可达高到 3mm; 整个模块包括了超声波发射器、 接收器与控制电路。
基本工作原理:
(1) 采用 IO 口 TRIG 触发测距, 给至少 10us 的高电平信号;
(2) 模块自动发送 8 个 40khz 的方波, 自动检测是否有信号返回;
(3) 有信号返回, 通过 IO 口 ECHO 输出一个高电平, 高电平持续的时间就是超声波从发射到返回的时间。
测量距离的公式:
uS/58=厘米或者 uS/148=英寸;
或是: 距离=高电平时间*声速(340M/S)/2;
建议测量周期为 60ms 以上, 以防止发射信号对回响信号的影响。
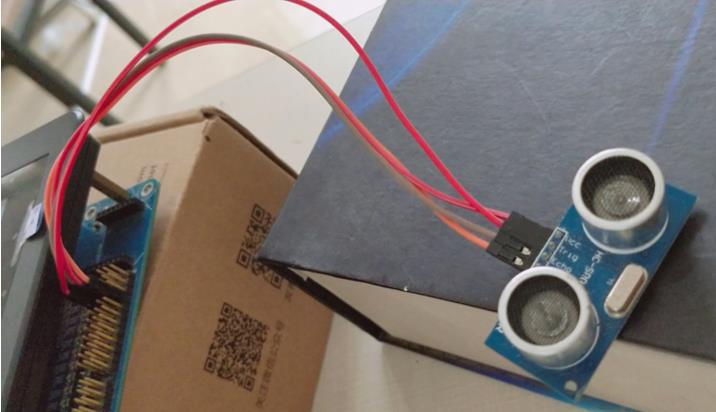
下面是超声波模块与开发板的连线方式:
2. 示例代码
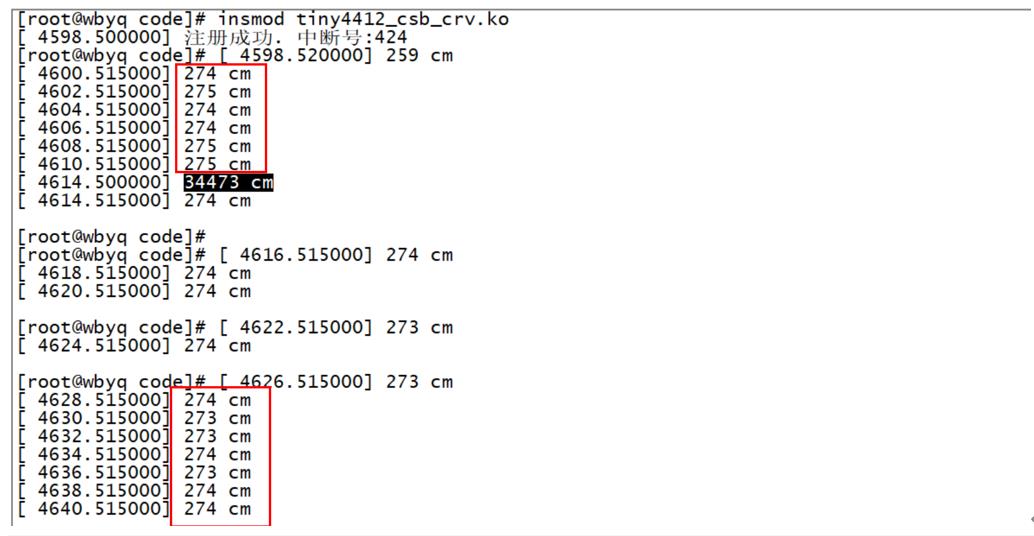
下面是超声波测距模块的驱动代码,将超声波模块的输出脚接在开发板支持中断的IO口上,配置为上升沿触发,当超声波输出脚检测到高电平就进去中断服务函数,在中断服务函数里调度工作队列,最终在工作函数里完成高电平的时间长度获取,计算测量的距离,直接在驱动代码里打印出来。
下面是测量的结果:
2.1 驱动代码
#include <linux/kernel.h>
#include <linux/module.h>
#include <linux/timer.h>
#include <linux/gpio.h>
#include <mach/gpio.h>
#include <plat/gpio-cfg.h>
#include <linux/interrupt.h>
static struct timer_list timer;
static struct work_struct work;
static int irq;
#define TRIG EXYNOS4_GPB(7) //输出触发信号 第8个IO口
#define ECHO EXYNOS4_GPX1(0) //ECHO 回响信号输出--中断 第9个IO口
/*获取高电平持续时间--us单位*/
static u32 GetTimeH(void)
ktime_t my_time,my_time2;
unsigned int i,j;
my_time=ktime_get(); //获取当前时间
i=ktime_to_us(my_time); //转 us
while(gpio_get_value(ECHO))
my_time2=ktime_get(); //获取当前时间
j=ktime_to_us(my_time2); //转 us
return j-i;
/*
工作函数
*/
static void csb_work_func(struct work_struct *work)
u32 time=GetTimeH();
printk("厘米:%d cm\\n",time/58);
/*外部中断服务函数*/
irqreturn_t csb_irq_handler_func(int irq, void *dev)
/*添加工作到工作队列*/
schedule_work(&work);
return IRQ_HANDLED;
/*内核定时器中断服务函数*/
static void timer_function(unsigned long data)
static u8 i=0;
mod_timer(&timer,msecs_to_jiffies(1000)+jiffies);
i=!i;
if(i)
gpio_set_value(TRIG,1);
else
gpio_set_value(TRIG,0);
static int __init tiny4412_linux_csb_init(void)
/*请求GPIO口使用权*/
gpio_request(TRIG,"CSB");
/*配置GPIO引脚*/
s3c_gpio_cfgpin(TRIG,S3C_GPIO_OUTPUT);
/*GPIO默认输出值*/
gpio_set_value(TRIG,0);
/*初始化工作函数*/
INIT_WORK(&work,csb_work_func);
/*1. 获取中断号*/
irq=gpio_to_irq(ECHO);
/*2. 注册中断*/
request_irq(irq,csb_irq_handler_func,IRQF_TRIGGER_RISING,"tiny4412_csb",NULL);
timer.expires=HZ+jiffies; /*单位是节拍*/
timer.function=timer_function;
timer.data=666;
/*1. 初始化定时器*/
init_timer(&timer);
/*2. 添加定时器到内核*/
add_timer(&timer);
printk("驱动测试: 驱动安装成功\\n");
return 0;
static void __exit tiny4412_linux_csb_cleanup(void)
/*3. 删除定时器*/
del_timer_sync(&timer);
free_irq(irq,NULL);
printk("驱动测试: 驱动卸载成功\\n");
module_init(tiny4412_linux_csb_init); /*驱动入口--安装驱动的时候执行*/
module_exit(tiny4412_linux_csb_cleanup); /*驱动出口--卸载驱动的时候执行*/
MODULE_LICENSE("GPL"); /*设置模块的许可证--GPL*/
2.2 Makefile
KER_DRI=/home/wbyq/work/linux-3.5/linux-3.5
all:
make -C $(KER_DRI) M=`pwd` modules
cp *.ko /home/wbyq/work/rootfs/code -f
make -C $(KER_DRI) M=`pwd` modules clean
obj-m += linux_csb.o
以上是关于Linux驱动开发-编写超声波测距模块的驱动的主要内容,如果未能解决你的问题,请参考以下文章