opencv动态背景下运动目标检测 FAST+SURF+FLANN配准差分 17/12/13更新图片
Posted BHY_
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了opencv动态背景下运动目标检测 FAST+SURF+FLANN配准差分 17/12/13更新图片相关的知识,希望对你有一定的参考价值。
FAST检测特征点+SURF描述特征点速度上要比SURF在多尺度下检测特征点后描述要快的多
在自己的电脑上做了两种实验的对比,通过VS性能分析可以看到结果
配置I5 2.7GHZ X64 VS2012 OPENCV249
代码中大津法二值化可以直接用opencv提供的大津法接口
| 代码功能 | SURF提取描述 | FAST提取SURF描述 |
| 特征点提取 | 24.2% | 0.9% |
| 特征点描述 | 25% | 14.7% |
| 特征点匹配 | 12.2% | 8.9% |
检测效果:
原软件界面:

怪自己手残,不应该中文命名的,调试会出现很多问题
// 动态背景目标探测Dlg.cpp : 实现文件
//
#include "stdafx.h"
#include "动态背景目标探测.h"
#include "动态背景目标探测Dlg.h"
#include "afxdialogex.h"
#include <opencv2/opencv.hpp>
#include <opencv2/nonfree/nonfree.hpp>
using namespace cv;
using namespace std;
CString strFilePath; //视频文件名
VideoCapture capture;//视频源
Mat image01,image02;
bool bExit,bGetTemplat;
bool bFirst = true;//第一次SURF循环
Point g_pt(-1,-1);
C动态背景目标探测Dlg *dlg;
int picSize = 912;
#ifdef _DEBUG
#define new DEBUG_NEW
#endif
// C动态背景目标探测Dlg 对话框
C动态背景目标探测Dlg::C动态背景目标探测Dlg(CWnd* pParent /*=NULL*/)
: CDialogEx(C动态背景目标探测Dlg::IDD, pParent)
m_hIcon = AfxGetApp()->LoadIcon(IDR_MAINFRAME);
void C动态背景目标探测Dlg::DoDataExchange(CDataExchange* pDX)
CDialogEx::DoDataExchange(pDX);
BEGIN_MESSAGE_MAP(C动态背景目标探测Dlg, CDialogEx)
ON_WM_PAINT()
ON_WM_QUERYDRAGICON()
ON_BN_CLICKED(IDC_CHOSEFILE, &C动态背景目标探测Dlg::OnBnClickedChosefile)
ON_BN_CLICKED(IDC_TARGET, &C动态背景目标探测Dlg::OnBnClickedTarget)
ON_BN_CLICKED(IDC_STOP, &C动态背景目标探测Dlg::OnBnClickedStop)
END_MESSAGE_MAP()
// C动态背景目标探测Dlg 消息处理程序
BOOL C动态背景目标探测Dlg::OnInitDialog()
CDialogEx::OnInitDialog();
// 设置此对话框的图标。当应用程序主窗口不是对话框时,框架将自动
// 执行此操作
SetIcon(m_hIcon, TRUE); // 设置大图标
SetIcon(m_hIcon, FALSE); // 设置小图标
// TODO: 在此添加额外的初始化代码
HWND hWnd ;
HWND hParent;
namedWindow("pic", WINDOW_AUTOSIZE);
hWnd = (HWND)cvGetWindowHandle("pic");
hParent = ::GetParent(hWnd);
::SetParent(hWnd, GetDlgItem(IDC_PIC)->m_hWnd);
::ShowWindow(hParent, SW_HIDE);
namedWindow("diff", WINDOW_AUTOSIZE);
hWnd = (HWND)cvGetWindowHandle("diff");
hParent = ::GetParent(hWnd);
::SetParent(hWnd, GetDlgItem(IDC_DIFF)->m_hWnd);
::ShowWindow(hParent, SW_HIDE);
SetDlgItemInt(IDC_THRESHOLD, 21);
dlg = (C动态背景目标探测Dlg*)theApp.m_pMainWnd;
bExit = 0;
bGetTemplat = 0;
return TRUE; // 除非将焦点设置到控件,否则返回 TRUE
// 如果向对话框添加最小化按钮,则需要下面的代码
// 来绘制该图标。对于使用文档/视图模型的 MFC 应用程序,
// 这将由框架自动完成。
void C动态背景目标探测Dlg::OnPaint()
if (IsIconic())
CPaintDC dc(this); // 用于绘制的设备上下文
SendMessage(WM_ICONERASEBKGND, reinterpret_cast<WPARAM>(dc.GetSafeHdc()), 0);
// 使图标在工作区矩形中居中
int cxIcon = GetSystemMetrics(SM_CXICON);
int cyIcon = GetSystemMetrics(SM_CYICON);
CRect rect;
GetClientRect(&rect);
int x = (rect.Width() - cxIcon + 1) / 2;
int y = (rect.Height() - cyIcon + 1) / 2;
// 绘制图标
dc.DrawIcon(x, y, m_hIcon);
else
CDialogEx::OnPaint();
//当用户拖动最小化窗口时系统调用此函数取得光标
//显示。
HCURSOR C动态背景目标探测Dlg::OnQueryDragIcon()
return static_cast<HCURSOR>(m_hIcon);
void C动态背景目标探测Dlg::OnBnClickedChosefile()
// 设置过滤器
TCHAR szFilter[] = _T("|所有文件(*.*)|*.*||");
// 构造打开文件对话框
CFileDialog fileDlg(TRUE, _T(""), NULL, 0, szFilter, this);
// 显示打开文件对话框
if (IDOK == fileDlg.DoModal())
// 如果点击了文件对话框上的“打开”按钮,则将选择的文件路径显示到编辑框里
strFilePath = fileDlg.GetPathName();
capture.open(string(strFilePath));
bExit = 0;
bFirst = TRUE;
//对轮廓按面积降序排列
bool biggerSort(vector<Point> v1, vector<Point> v2)
return contourArea(v1)>contourArea(v2);
void on_MouseHandle(int event, int x, int y, int flags, void* param)
Mat& image = *(cv::Mat*) param;
switch(event)
//左键按下消息
case EVENT_LBUTTONDOWN:
g_pt = Point(x, y);
CString str;
CRect rect;
dlg->GetDlgItem(IDC_PIC)->GetClientRect(&rect);
str.Format("%d,%d", int(g_pt.x*picSize/rect.right), int(g_pt.y*picSize/rect.bottom));
dlg->SetDlgItemText(IDC_POS, str);
g_pt.x = int(g_pt.x*picSize/rect.right);
g_pt.y = int(g_pt.y*picSize/rect.bottom);
bGetTemplat = TRUE;
break;
case EVENT_RBUTTONDOWN:
bGetTemplat = FALSE;
break;
break;
//大津法求阈值函数
int otsuThreshold(IplImage* img)
int T = 0;//阈值
int height = img->height;
int width = img->width;
int step = img->widthStep;
int channels = img->nChannels;
uchar* data = (uchar*)img->imageData;
double gSum0;//第一类灰度总值
double gSum1;//第二类灰度总值
double N0 = 0;//前景像素数
double N1 = 0;//背景像素数
double u0 = 0;//前景像素平均灰度
double u1 = 0;//背景像素平均灰度
double w0 = 0;//前景像素点数占整幅图像的比例为ω0
double w1 = 0;//背景像素点数占整幅图像的比例为ω1
double u = 0;//总平均灰度
double tempg = -1;//临时类间方差
double g = -1;//类间方差
double Histogram[256]=0;// = new double[256];//灰度直方图
double N = width*height;//总像素数
for(int i=0;i<height;i++)
//计算直方图
for(int j=0;j<width;j++)
double temp =data[i*step + j * 3] * 0.114 + data[i*step + j * 3+1] * 0.587 + data[i*step + j * 3+2] * 0.299;
temp = temp<0? 0:temp;
temp = temp>255? 255:temp;
Histogram[(int)temp]++;
//计算阈值
for (int i = 0;i<256;i++)
gSum0 = 0;
gSum1 = 0;
N0 += Histogram[i];
N1 = N-N0;
if(0==N1)break;//当出现前景无像素点时,跳出循环
w0 = N0/N;
w1 = 1-w0;
for (int j = 0;j<=i;j++)
gSum0 += j*Histogram[j];
u0 = gSum0/N0;
for(int k = i+1;k<256;k++)
gSum1 += k*Histogram[k];
u1 = gSum1/N1;
//u = w0*u0 + w1*u1;
g = w0*w1*(u0-u1)*(u0-u1);
if (tempg<g)
tempg = g;
T = i;
return T;
//检测与点选线程函数
UINT C动态背景目标探测Dlg::ThreadFunc(LPVOID pParam)
//线程函数实现
C动态背景目标探测Dlg *dlg = (C动态背景目标探测Dlg*)pParam;
Mat image1,image2;
Mat imagetemp1,imagetemp2;
Mat temp,image02temp;
vector<Rect> target;
Mat imageGray1,imageGray2;
namedWindow("pic");
setMouseCallback("pic",on_MouseHandle,(void*)&image02temp);
FastFeatureDetector fast(130);//FAST特征点检测
//SurfFeatureDetector surfDetector(4000);//SURF特征点检测
vector<KeyPoint> keyPoint1,keyPoint2;//两幅图中检测到的特征点
SurfDescriptorExtractor SurfDescriptor;//SURF特征点描述
Mat imageDesc1,imageDesc2;
while (!bExit)
if (!bGetTemplat)
target.clear();
if (bFirst)//第一次处理
//前一帧图
capture >> imagetemp1;
if (imagetemp1.empty())
bExit = TRUE;
bFirst = TRUE;
bGetTemplat = FALSE;
break;
//这里因为我处理需要,从原视频中抠出picSize*picSize部分
if (imagetemp1.cols > picSize + 200 && imagetemp1.rows > picSize)
image01 = imagetemp1(Rect(200, 0, picSize, picSize));
else
image01 = imagetemp1.clone();
//后一帧图
capture >> imagetemp2;
capture >> imagetemp2;
capture >> imagetemp2;
if (imagetemp2.empty())
bExit = TRUE;
bFirst = TRUE;
bGetTemplat = FALSE;
break;
//这里因为我处理需要,从原视频中抠出picSize*picSize部分
if (imagetemp2.cols > picSize + 200 && imagetemp2.rows > picSize)
image02 = imagetemp2(Rect(200, 0, picSize, picSize));
else
image02 = imagetemp2.clone();
//灰度图转换
cvtColor(image01,image1,CV_RGB2GRAY);
cvtColor(image02,image2,CV_RGB2GRAY);
//提取特征点
fast.detect(image1,keyPoint1);//FAST特征点提取
fast.detect(image2,keyPoint2);//FAST特征点提取
//surfDetector.detect(image1,keyPoint1);//SURF特征点提取
//surfDetector.detect(image2,keyPoint2);//SURF特征点提取
//特征点描述,为下边的特征点匹配做准备
SurfDescriptor.compute(image1,keyPoint1,imageDesc1);//SURF特征点描述
SurfDescriptor.compute(image2,keyPoint2,imageDesc2);//SURF特征点描述
bFirst = false;
else//对于后面的处理,只需要提取一帧图像的特征点就可以了,把上次的结果给这次的第一帧
image01 = image02.clone();
imageDesc1 = imageDesc2.clone();
keyPoint1 = keyPoint2;
//后一帧图
capture >> imagetemp2;
capture >> imagetemp2;
capture >> imagetemp2;
if (imagetemp2.empty())
bExit = TRUE;
bFirst = TRUE;
bGetTemplat = FALSE;
break;
//这里因为我处理需要,从原视频中抠出picSize*picSize部分
if (imagetemp2.cols > picSize + 200 && imagetemp2.rows > picSize)
image02 = imagetemp2(Rect(200, 0, picSize, picSize));
else
image02 = imagetemp2.clone();
//灰度图转换
cvtColor(image02,image2,CV_RGB2GRAY);
double time0 = static_cast<double>(getTickCount());//开始计时,需要计时的是FAST-SURF配准的时间
//提取特征点
fast.detect(image2,keyPoint2);
//surfDetector.detect(image2,keyPoint2);
//特征点描述,为下边的特征点匹配做准备
SurfDescriptor.compute(image2,keyPoint2,imageDesc2);
//获得匹配特征点,并提取最优配对
FlannBasedMatcher matcher;
vector<DMatch> matchePoints;
matcher.match(imageDesc1,imageDesc2,matchePoints,Mat());
sort(matchePoints.begin(),matchePoints.end()); //特征点排序
vector<Point2f> imagePoints1,imagePoints2;
if (matchePoints.size()<50)//对特征点的数量做一个限制
continue;
//筛除误匹配特征点
for(int i=0; i<matchePoints.size()*0.5; i++)
imagePoints1.push_back(keyPoint1[matchePoints[i].queryIdx].pt);
imagePoints2.push_back(keyPoint2[matchePoints[i].trainIdx].pt);
//获取图像1到图像2的投影映射矩阵 尺寸为3*3
Mat homo=findHomography(imagePoints1,imagePoints2,CV_RANSAC);
也可以使用getPerspectiveTransform方法获得透视变换矩阵,不过要求只能有4个点,效果稍差
//Mat homo=getPerspectiveTransform(imagePoints1,imagePoints2);
//cout<<"变换矩阵为:\\n"<<homo<<endl<<endl; //输出映射矩阵
//图像配准
Mat imageTransform1,imgpeizhun,imgerzhi;
warpPerspective(image01,imageTransform1,homo,Size(image02.cols,image02.rows));
//imshow("经过透视矩阵变换后",imageTransform1);
absdiff(image02, imageTransform1, imgpeizhun);
//imshow("配准diff", imgpeizhun);
int t = otsuThreshold(&IplImage(imgpeizhun));//大津法得到差分图的二值化阈值
threshold(imgpeizhun, imgerzhi, t, 255.0 , CV_THRESH_BINARY);
//imshow("配准二值化", imgerzhi);
image02temp = image02.clone();
cvtColor(imgerzhi,temp,CV_RGB2GRAY);
//检索连通域
Mat se=getStructuringElement(MORPH_RECT, Size(3,3));
morphologyEx(temp, temp, MORPH_OPEN, se);
int dialate_size = dlg->GetDlgItemInt(IDC_THRESHOLD);
Mat se2=getStructuringElement(MORPH_RECT, Size(dialate_size,dialate_size));
morphologyEx(temp, temp, MORPH_DILATE, se2);
vector<vector<Point>> contours;
findContours(temp, contours, RETR_EXTERNAL, CHAIN_APPROX_NONE);
//轮廓数量的筛选
if (contours.size()<1)
continue;
//std::sort(contours.begin(), contours.end(), biggerSort);//轮廓大小的排序,这里注释了因为计算费事
float m_BiLi = 0.8;//由于两幅图配准,边缘不会一致,因此对原图大小0.8的比例中搜索检测到的目标
for (int k = 0; k < contours.size(); k++)
Rect bomen = boundingRect(contours[k]);
//省略由于配准带来的边缘无效信息
if (bomen.x > image02temp.cols * (1 - m_BiLi) && bomen.y > image02temp.rows * (1 - m_BiLi)
&& bomen.x + bomen.width < image02temp.cols * m_BiLi && bomen.y + bomen.height < image02temp.rows * m_BiLi
/*&& contourArea(contours[k]) > contourArea(contours[0])/10*/
&& contourArea(contours[k]) > 900 && contourArea(contours[k]) < 30000)
rectangle(image02temp, bomen, Scalar(0,0,255), 4, 8, 0);
target.push_back(bomen);
//输出帧率
time0 = ((double)getTickCount()-time0)/getTickFrequency();
dlg->SetDlgItemInt(IDC_EDIT_FRE, (int)(1/time0), 1);
//显示图像
CRect rect;
dlg -> GetDlgItem(IDC_DIFF)->GetClientRect(&rect);
resize(temp, temp, cv::Size(rect.Width(), rect.Height()));
imshow("diff", temp);
dlg -> GetDlgItem(IDC_PIC)->GetClientRect(&rect);
resize(image02temp, image02temp, cv::Size(rect.Width(), rect.Height()));
imshow("pic", image02temp);
waitKey(20);
else//鼠标点击 选择目标,可以进行跟踪(这里没写跟踪部分,只写了点选部分)
int minIndex;
int minDis = 9999999;
int aimDis;
//距离与点选的坐标最近的目标是哪个
for (int i = 0; i < target.size(); i++)
aimDis = sqrt((target[i].x + target[i].width/2 - g_pt.x) * (target[i].x + target[i].width/2 - g_pt.x) + (target[i].y + target[i].height/2 - g_pt.y) * (target[i].y + target[i].height/2 - g_pt.y));
if (aimDis < minDis)
minDis = aimDis;
minIndex = i;
//绘制点选目标
rectangle(image02, target[minIndex], Scalar(0,255,255), 4, 8, 0);
//显示点选目标
CRect rect;
Mat image02show;
dlg -> GetDlgItem(IDC_PIC)->GetClientRect(&rect);
resize(image02, image02show, cv::Size(rect.Width(), rect.Height()));
imshow("pic", image02show);
waitKey(20);
return 0;
void C动态背景目标探测Dlg::OnBnClickedTarget()
AfxBeginThread(ThreadFunc, this); //启动线程
void C动态背景目标探测Dlg::OnBnClickedStop()
capture.release();
bExit = TRUE;
bGetTemplat = FALSE;
FAST(image1, keyPoint1, dlg->GetDlgItemInt(IDC_EDIT_FAST));
FAST(image2, keyPoint2, dlg->GetDlgItemInt(IDC_EDIT_FAST));
//fast.detect(image1,keyPoint1);//FAST特征点提取
//fast.detect(image2,keyPoint2);//FAST特征点提取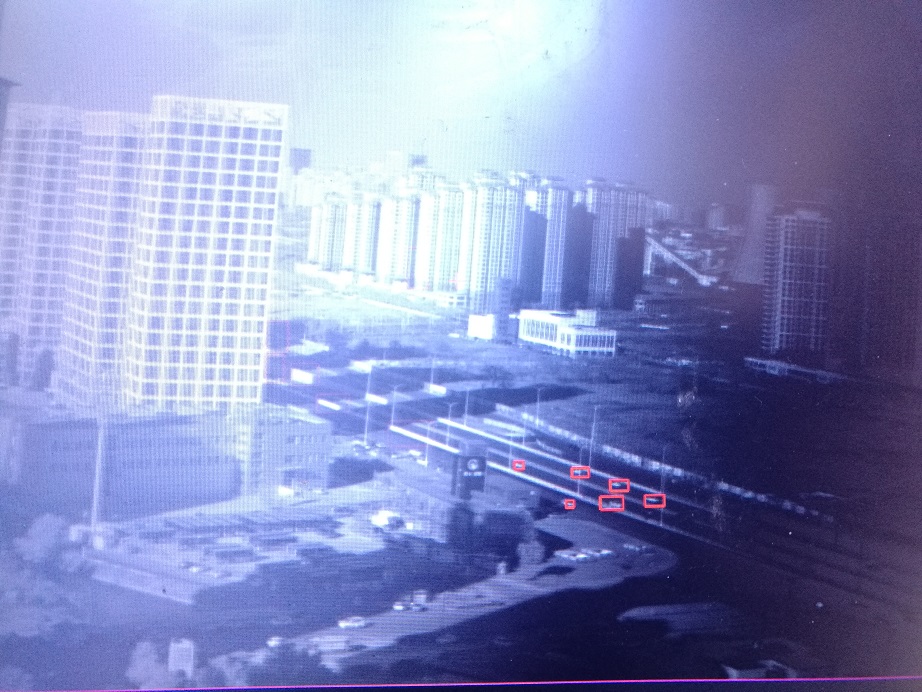
以上是关于opencv动态背景下运动目标检测 FAST+SURF+FLANN配准差分 17/12/13更新图片的主要内容,如果未能解决你的问题,请参考以下文章