camera-lidar自动驾驶相机-激光雷达融合方案综述
Posted 踟蹰横渡口,彳亍上滩舟。
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了camera-lidar自动驾驶相机-激光雷达融合方案综述相关的知识,希望对你有一定的参考价值。
数据集:
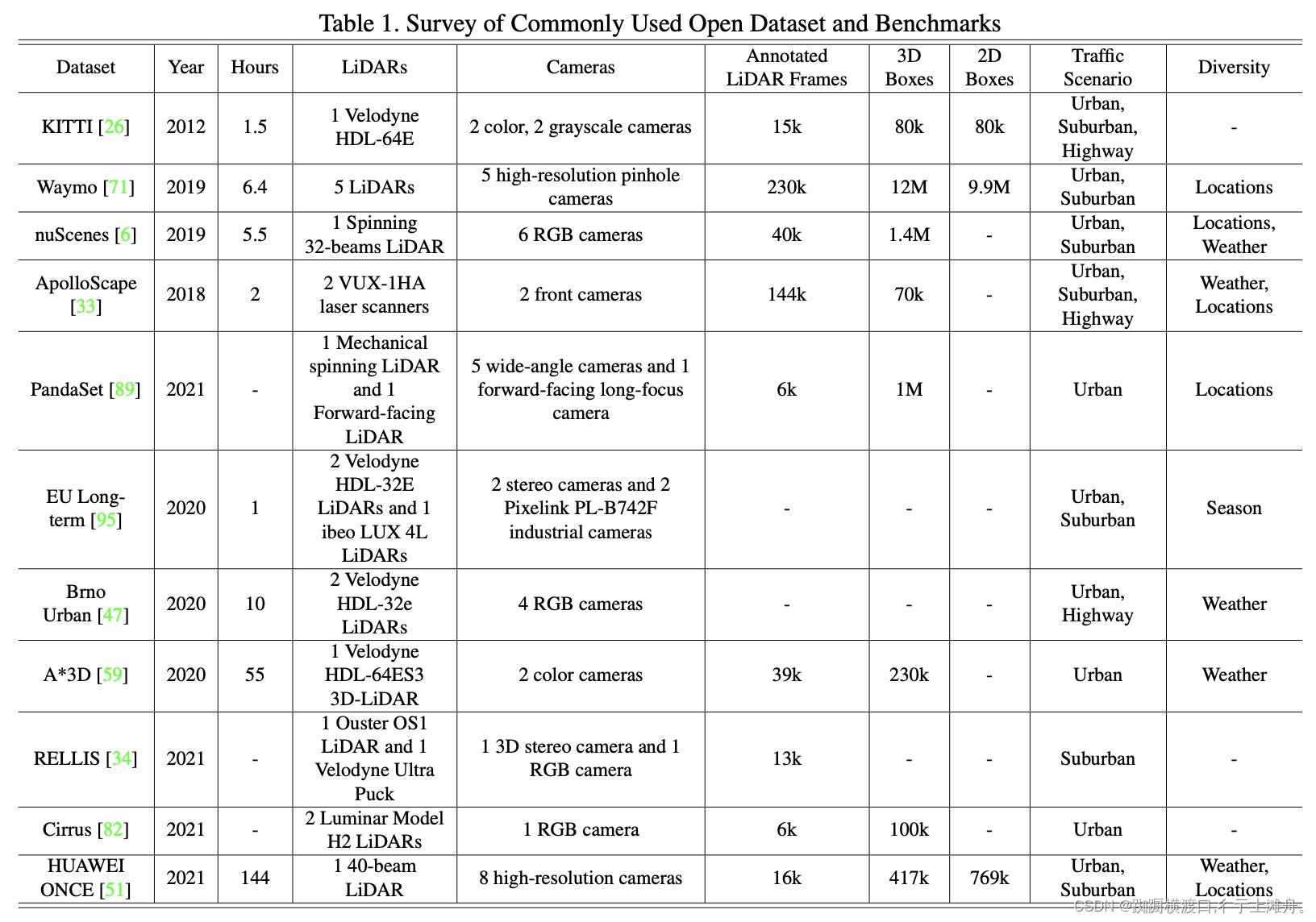
多模态融合是感知自动驾驶系统的一项基本任务,最近引起了许多研究人员的兴趣。然而,由于原始数据噪声大、信息利用率低以及多模态传感器的无对准,达到相当好的性能并非易事。本文对现有的基于多模态自动驾驶感知任务方法进行了文献综述。分析超过50篇论文,包括摄像头和激光雷达,试图解决目标检测和语义分割任务。与传统的融合模型分类方法不同,作者从融合阶段的角度,通过更合理的分类法将融合模型分为两大类,四小类。此外,研究了当前的融合方法,就潜在的研究机会展开讨论。
最近,用于自动驾驶感知任务的多模态融合方法发展迅速,其从跨模态特征表示和更可靠的模态传感器,到更复杂、更稳健的多模态融合深度学习模型和技术。然而,只有少数文献综述集中在多模态融合方法本身的方法论上,大多数文献都遵循传统规则,将其分为前融合、深度(特征)融合和后融合三大类,重点关注深度学习模型中融合特征的阶段,无论是数据级、特征级还是提议级。首先,这种分类法没有明确定义每个级别的特征表示。其次,它表明,激光雷达和摄像头这两个分支在处理过程中始终是对称的,模糊了激光雷达分支中融合提议级特征和摄像头分支中融合数据级特征的情况。综上所述,传统的分类法可能是直观的,但对于总结最近出现的越
以上是关于camera-lidar自动驾驶相机-激光雷达融合方案综述的主要内容,如果未能解决你的问题,请参考以下文章