3D,点云可视化技术
Posted J-A
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了3D,点云可视化技术相关的知识,希望对你有一定的参考价值。
随着三维激光扫描技术的发展,目前可以采集到海量的点云数据。
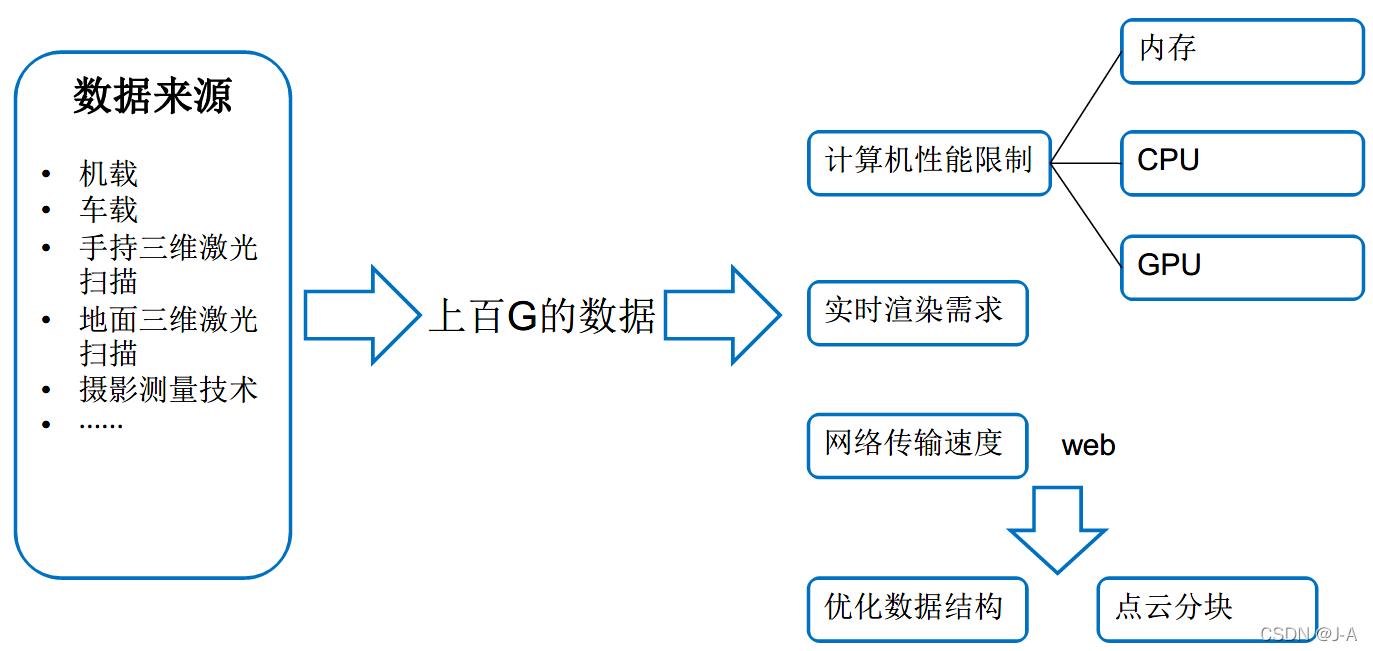
点云数据中本身仅仅包含多个点数据,对于较小规模的点云数据,只需要依次使用面或者点等方式将其全部渲染出来。但是面对较大数据量的点云,就需要考虑许多随之而来的问题:
1)内存限制:以基于 V8 引擎为例,32 位机器可使用内存约为 0.7 GB,64 位机器可使用内存约为 1.4 GB。而渲染完整的 1 Billion 无 RGB 信息的点云数据就需要超过 22 GB 的内存进行存储(对于 javascript 仅有 double 数据,其计算为每个点需要 XYZ 三个点,即存储每个点需要 3 × 8 个 Byte 的内存,1 Billion 点云约为 22.35 GB)。因此,必须将点云数据进行分割,从而按需渲染以减少内存使用量;
2)实时渲染需求:对于点云渲染的应用场景,往往并不仅仅只需要输出渲染后的可视化结果,而是需要满足基于点云渲染后的具体应用需求,例如游戏或者标注工具等。这对于点云渲染带来了实时性的需求,因此必须对巨大规模的点云数据采取一定的处理以减少 CPU 以及 GPU 的计算压力;
3)
以上是关于3D,点云可视化技术的主要内容,如果未能解决你的问题,请参考以下文章
点云处理技术之open3d第二篇:点云的基本操作篇——可视化降采样法向量裁剪和绘制点云
点云处理技术之open3d第一篇:open3d的快速安装简介文件的读写和可视化操作
从 realsense API 或 Open3D 库可视化点云