自动驾驶感知系统实现(车道线检测和拟合目标检测与跟踪道路可行驶区域分割深度估计图像视野到BEV空间映射像平面到地平面映射)
Posted 踟蹰横渡口,彳亍上滩舟。
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了自动驾驶感知系统实现(车道线检测和拟合目标检测与跟踪道路可行驶区域分割深度估计图像视野到BEV空间映射像平面到地平面映射)相关的知识,希望对你有一定的参考价值。
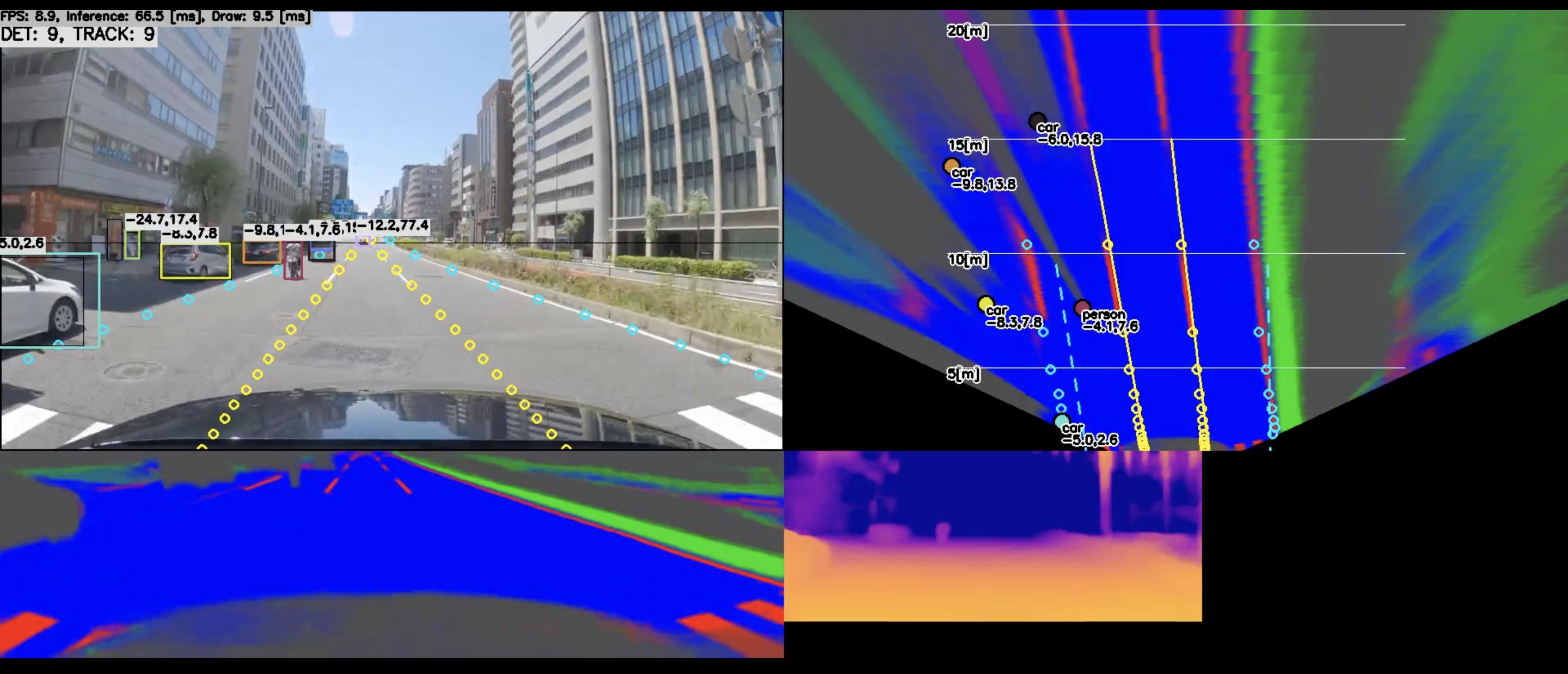
自动驾驶感知系统实现(车道线检测和拟合、目标检测与跟踪、道路可行驶区域分割、深度估计、图像视野到BEV空间映射、像平面到地平面映射)
项目下载地址:项目下载地址
推理引擎下载地址:推理引擎下载地址
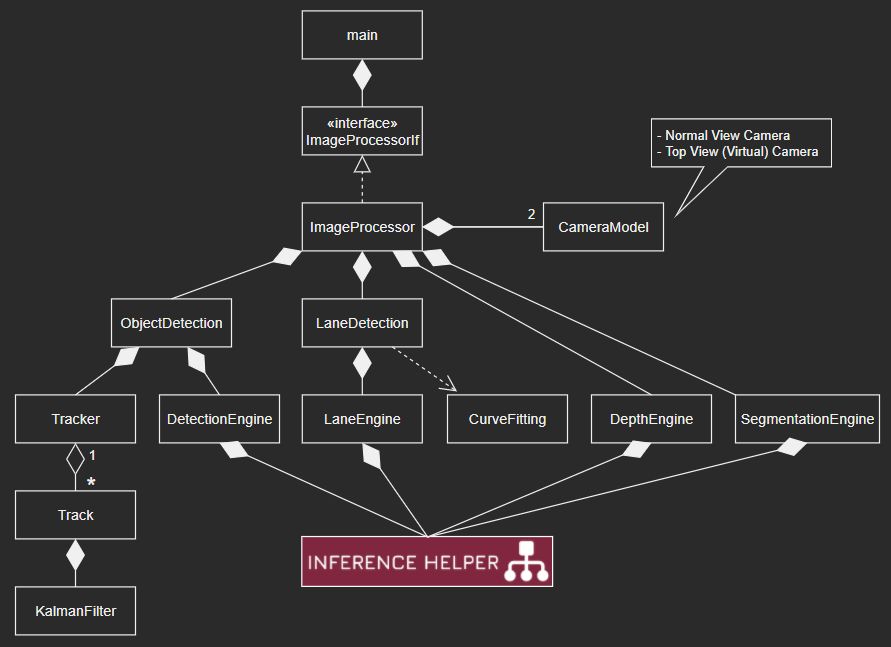
支持的功能
包含的功能:
- 车道线检测+车道线拟合;
- 2D目标检测+目标跟踪;
- 道路可行驶区域分割;
- 目标深度估计;
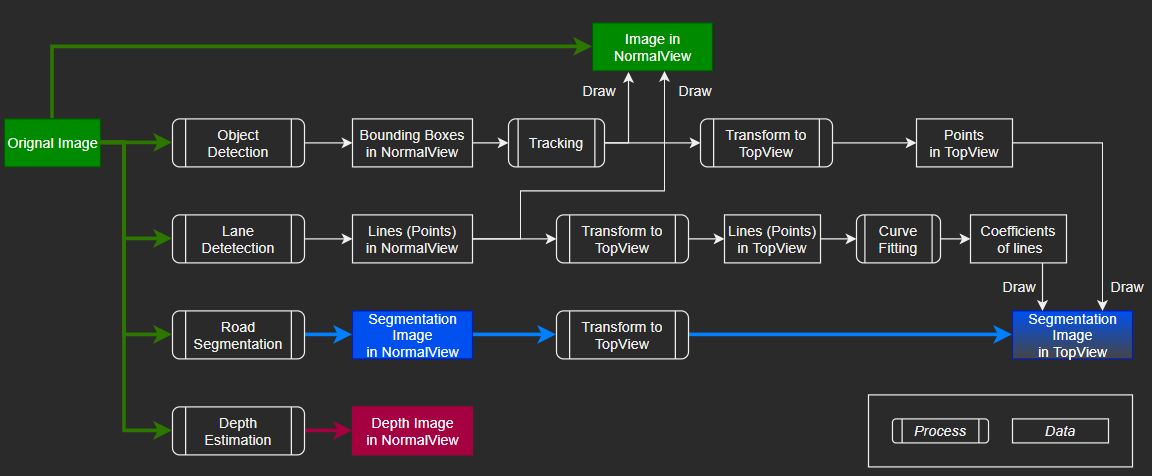
- 图像视野到BEV空间映射(Normal View -> Top View);
- 像平面到地平面映射(image plane -> ground plane in world coordinate system)
支持的计算平台
- Windows 10 (x64) + Visual Studio 2019
- Intel Core i7-6700 @ 3.4GHz + NVIDIA GeForce GTX 1070
- Jetson Xavier NX. JetPack 4.6
- You will get error if using JetPack 4.5 or before because of TensorRT error
支持的深度学习框架
- TensorFlow Lite with XNNPACK delegate
- CPU
- Note: Running with CPU is very slow
- TensorRT
- GPU
- GPU
运行命令
./main [input]
- input:
- use the default image file set in source code (main.cpp): blank
- ./main
- use video file: *.mp4, *.avi, *.webm
- ./main test.mp4
- use image file: *.jpg, *.png, *.bmp
- ./main test.jpg
- use camera: number (e.g. 0, 1, 2, ...)
- ./main 0
- use camera via gstreamer on Jetson: jetson
- ./main jetson
下载模型和相关资源
sh ./download_resource.sh
编译WINDOWS版本和LINUX版本
main.sln
mkdir build && cd build
# cmake .. -DENABLE_TENSORRT=off
cmake .. -DENABLE_TENSORRT=on
make
./main
模型相关信息和测试性能
- Object Detection
- YOLOX-Nano, 480x640
- https://github.com/PINTO0309/PINTO_model_zoo/blob/main/132_YOLOX/download_nano_new.sh
- https://github.com/PINTO0309/PINTO_model_zoo/blob/main/132_YOLOX/download_nano.sh
- Lane Detection
- Ultra-Fast-Lane-Detection, 288x800
- https://github.com/PINTO0309/PINTO_model_zoo/blob/main/140_Ultra-Fast-Lane-Detection/download_culane.sh
- Road Segmentation
- road-segmentation-adas-0001, 512x896
- https://github.com/PINTO0309/PINTO_model_zoo/blob/main/136_road-segmentation-adas-0001/download.sh
- Depth Estimation
- LapDepth, 192x320
- https://github.com/PINTO0309/PINTO_model_zoo/blob/main/148_LapDepth/download_ldrn_kitti_resnext101.sh
- LapDepth, 256x512
- 00_doc/pytorch_pkl_2_onnx_LapDepth.ipynb
Performance
| Model | Jetson Xavier NX | GTX 1070 |
|---|---|---|
| == Inference time == | ||
| Object Detection | 10.6 ms | 6.4 ms |
| Lane Detection | 9.6 ms | 4.9 ms |
| Road Segmentation | 29.1 ms | 13.5 ms |
| Depth Estimation | 55.2 ms | 37.8 ms |
| == FPS == | ||
| Total (All functions) | 6.8 fps | 10.9 fps |
| Total (w/o Segmentation, Depth) | 24.4 fps | 33.3 fps |
以上是关于自动驾驶感知系统实现(车道线检测和拟合目标检测与跟踪道路可行驶区域分割深度估计图像视野到BEV空间映射像平面到地平面映射)的主要内容,如果未能解决你的问题,请参考以下文章