全景驾驶感知网络YOLOP部署与实现(交通目标检测可驾驶区域分割车道线检测)
Posted 踟蹰横渡口,彳亍上滩舟。
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了全景驾驶感知网络YOLOP部署与实现(交通目标检测可驾驶区域分割车道线检测)相关的知识,希望对你有一定的参考价值。
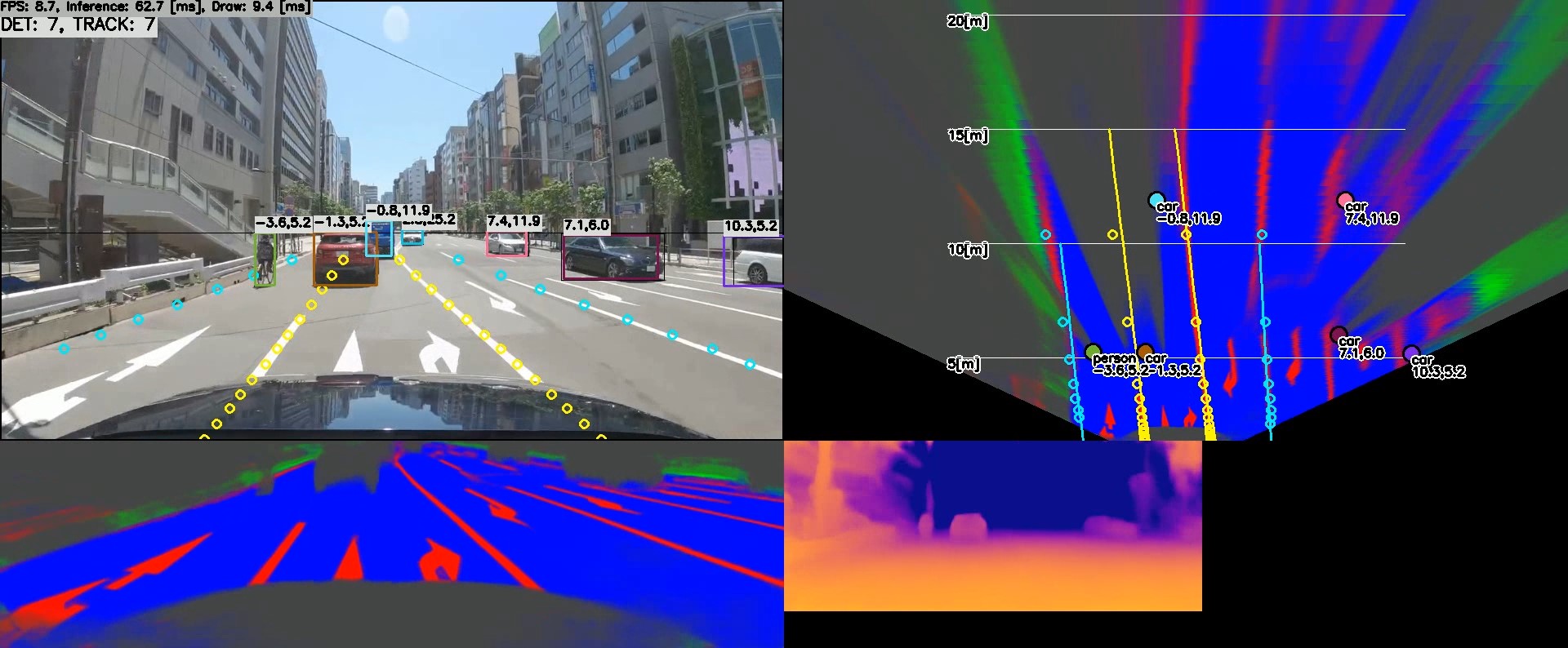
全景驾驶感知网络YOLOP部署与实现(交通目标检测、可驾驶区域分割、车道线检测)
项目下载地址
包含C++和Python两种版本的程序实现:下载地址
YOLOP开源项目:
https://github.com/hustvl/YOLOP
ONNX导出:
import torch
import torch.nn as nn
from lib.models.common import Conv, SPP, Bottleneck, BottleneckCSP, Focus, Concat, Detect, SharpenConv
from torch.nn import Upsample
import cv2
# The lane line and the driving area segment branches without share information with each other and without link
YOLOP = [
[24, 33, 42], # Det_out_idx, Da_Segout_idx, LL_Segout_idx
[-1, Focus, [3, 32, 3]], # 0
[-1, Conv, [32, 64, 3, 2]], # 1
[-1, BottleneckCSP, [64, 64, 1]], # 2
[-1, Conv, [64, 128, 3, 2]], # 3
[-1, BottleneckCSP, [128, 128, 3]], # 4
[-1, Conv, [128, 256, 3, 2]], # 5
[-1, BottleneckCSP, [256, 256, 3]], # 6
[-1, Conv, [256, 512, 3, 2]], # 7
[-1, SPP, [512, 512, [5, 9, 13]]], # 8
[-1, BottleneckCSP, [512, 512, 1, False]], # 9
[-1, Conv, [512, 256, 1, 1]], # 10
[-1, Upsample, [None, 2, 'nearest']], # 11
[[-1, 6], Concat, [1]], # 12
[-1, BottleneckCSP, [512, 256, 1, False]], # 13
[-1, Conv, [256, 128, 1, 1]], # 14
[-1, Upsample, [None, 2, 'nearest']], # 15
[[-1, 4], Concat, [1]], # 16 #Encoder
[-1, BottleneckCSP, [256, 128, 1, False]], # 17
[-1, Conv, [128, 128, 3, 2]], # 18
[[-1, 14], Concat, [1]], # 19
[-1, BottleneckCSP, [256, 256, 1, False]], # 20
[-1, Conv, [256, 256, 3, 2]], # 21
[[-1, 10], Concat, [1]], # 22
[-1, BottleneckCSP, [512, 512, 1, False]], # 23
[[17, 20, 23], Detect,
[1, [[3, 9, 5, 11, 4, 20], [7, 18, 6, 39, 12, 31], [19, 50, 38, 81, 68, 157]], [128, 256, 512]]],
# Detection head 24
[16, Conv, [256, 128, 3, 1]], # 25
[-1, Upsample, [None, 2, 'nearest']], # 26
[-1, BottleneckCSP, [128, 64, 1, False]], # 27
[-1, Conv, [64, 32, 3, 1]], # 28
[-1, Upsample, [None, 2, 'nearest']], # 29
[-1, Conv, [32, 16, 3, 1]], # 30
[-1, BottleneckCSP, [16, 8, 1, False]], # 31
[-1, Upsample, [None, 2, 'nearest']], # 32
[-1, Conv, [8, 2, 3, 1]], # 33 Driving area segmentation head
[16, Conv, [256, 128, 3, 1]], # 34
[-1, Upsample, [None, 2, 'nearest']], # 35
[-1, BottleneckCSP, [128, 64, 1, False]], # 36
[-1, Conv, [64, 32, 3, 1]], # 37
[-1, Upsample, [None, 2, 'nearest']], # 38
[-1, Conv, [32, 16, 3, 1]], # 39
[-1, BottleneckCSP, [16, 8, 1, False]], # 40
[-1, Upsample, [None, 2, 'nearest']], # 41
[-1, Conv, [8, 2, 3, 1]] # 42 Lane line segmentation head
]
class MCnet(nn.Module):
def __init__(self, block_cfg):
super(MCnet, self).__init__()
layers, save = [], []
self.nc = 1
self.detector_index = -1
self.det_out_idx = block_cfg[0][0]
self.seg_out_idx = block_cfg[0][1:]
self.num_anchors = 3
self.num_outchannel = 5 + self.nc
# Build model
for i, (from_, block, args) in enumerate(block_cfg[1:]):
block = eval(block) if isinstance(block, str) else block # eval strings
if block is Detect:
self.detector_index = i
block_ = block(*args)
block_.index, block_.from_ = i, from_
layers.append(block_)
save.extend(x % i for x in ([from_] if isinstance(from_, int) else from_) if x != -1) # append to savelist
assert self.detector_index == block_cfg[0][0]
self.model, self.save = nn.Sequential(*layers), sorted(save)
self.names = [str(i) for i in range(self.nc)]
# set stride、anchor for detector
# Detector = self.model[self.detector_index] # detector
# if isinstance(Detector, Detect):
# s = 128 # 2x min stride
# # for x in self.forward(torch.zeros(1, 3, s, s)):
# # print (x.shape)
# with torch.no_grad():
# model_out = self.forward(torch.zeros(1, 3, s, s))
# detects, _, _ = model_out
# Detector.stride = torch.tensor([s / x.shape[-2] for x in detects]) # forward
# # print("stride"+str(Detector.stride ))
# Detector.anchors /= Detector.stride.view(-1, 1, 1) # Set the anchors for the corresponding scale
# check_anchor_order(Detector)
# self.stride = Detector.stride
def forward(self, x):
cache = []
out = []
det_out = None
for i, block in enumerate(self.model):
if block.from_ != -1:
x = cache[block.from_] if isinstance(block.from_, int) else [x if j == -1 else cache[j] for j in block.from_] # calculate concat detect
x = block(x)
if i in self.seg_out_idx: # save driving area segment result
# m = nn.Sigmoid()
# out.append(m(x))
out.append(torch.sigmoid(x))
if i == self.detector_index:
det_out = x
cache.append(x if block.index in self.save else None)
out[0] = out[0].view(2, 640, 640)
out[1] = out[1].view(2, 640, 640)
return det_out, out[0], out[1]
if __name__ == "__main__":
device = 'cuda' if torch.cuda.is_available() else 'cpu'
model = MCnet(YOLOP)
checkpoint = torch.load('weights/End-to-end.pth', map_location=device)
model.load_state_dict(checkpoint['state_dict'])
model.eval()
output_onnx = 'yolop.onnx'
inputs = torch.randn(1, 3, 640, 640)
# with torch.no_grad():
# output = model(inputs)
# print(output)
torch.onnx.export(model, inputs, output_onnx, verbose=False, opset_version=12, input_names=['images'], output_names=['det_out', 'drive_area_seg', 'lane_line_seg'])
print('convert', output_onnx, 'to onnx finish!!!')
try:
dnnnet = cv2.dnn.readNet(output_onnx)
print('read sucess')
except:
print('read failed')
以上是关于全景驾驶感知网络YOLOP部署与实现(交通目标检测可驾驶区域分割车道线检测)的主要内容,如果未能解决你的问题,请参考以下文章